También podría gustarte
- Formato de Requisición de PúestoDocumento2 páginasFormato de Requisición de PúestoMartha100% (2)
- Manipulación de cargas con puentes-grúa y polipastos. IEXD0108De EverandManipulación de cargas con puentes-grúa y polipastos. IEXD0108Aún no hay calificaciones
- Automatización de Estacion Didáctica de Distribucion FESTODocumento16 páginasAutomatización de Estacion Didáctica de Distribucion FESTOJosé GómezAún no hay calificaciones
- Proyecto de Ciencias Generador HidraulicoDocumento5 páginasProyecto de Ciencias Generador Hidraulicoangel100% (2)
- Sensores Tps y de PosicionDocumento175 páginasSensores Tps y de Posicionraul_coronado_4100% (1)
- Expediente TécnicoDocumento2 páginasExpediente TécnicoFOX74% (34)
- Robotizacion en La MineriaDocumento11 páginasRobotizacion en La MineriaNicolásFriasBarriosAún no hay calificaciones
- Simulación de Sistema de Transporte PalaDocumento28 páginasSimulación de Sistema de Transporte PalaNicole Riquelme CavieresAún no hay calificaciones
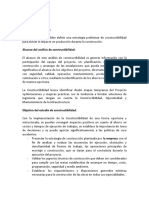
- Resumen de ConstructibilidadDocumento11 páginasResumen de ConstructibilidadUribe Fernando50% (2)
- Resumen DispatchDocumento11 páginasResumen DispatchDaniela Torres100% (2)
- Control de Contratistas DNVDocumento17 páginasControl de Contratistas DNVManuel Di MarcoAún no hay calificaciones
- PRESENTACION Bombas CentrifugasDocumento71 páginasPRESENTACION Bombas Centrifugasmario sanchezAún no hay calificaciones
- UF1881 - Resolución de incidencias de redes telemáticasDe EverandUF1881 - Resolución de incidencias de redes telemáticasAún no hay calificaciones
- Seguridad en Celdas RobotizadasDocumento10 páginasSeguridad en Celdas RobotizadasChristian LascanoAún no hay calificaciones
- Gestion de La Produccion en Open Pit 3Documento9 páginasGestion de La Produccion en Open Pit 3RENE PERCY ATENCIO OLIVAAún no hay calificaciones
- Criterios de Integracion de RobotsDocumento13 páginasCriterios de Integracion de RobotsAbelArfetSosaAún no hay calificaciones
- La Naturaleza de Los Explosivos y Sus Efectos GabyDocumento11 páginasLa Naturaleza de Los Explosivos y Sus Efectos GabyGABRIELA MARTINEZAún no hay calificaciones
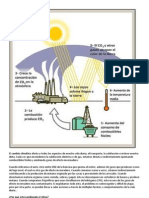
- Efecto Invernadero IlustracionDocumento3 páginasEfecto Invernadero IlustracionAna Elena Betancourt BucheliAún no hay calificaciones
- Seguridad en Instalaciones RobotizadasDocumento3 páginasSeguridad en Instalaciones RobotizadasCesar Zuñiga Junior50% (2)
- Maria Vasquez Semana 1. Calidad y ProductividadDocumento6 páginasMaria Vasquez Semana 1. Calidad y ProductividadEmilia Gonzalez100% (1)
- Detector de MinasDocumento49 páginasDetector de MinasGerman MeraAún no hay calificaciones
- Unidad 1 Saberes ROBOTICA APLICADADocumento9 páginasUnidad 1 Saberes ROBOTICA APLICADALUIS HUMBERTO DEL PRADO AGUIRREAún no hay calificaciones
- Trabajo - Colaborativo - Fase - 7Documento25 páginasTrabajo - Colaborativo - Fase - 7John Fredy PrietoAún no hay calificaciones
- Fase LLL ManufacturaDocumento5 páginasFase LLL ManufacturaLuis Daniel Morales ValezAún no hay calificaciones
- Cook Meneses Jordi Robot Control Odometrico Estado Del ArteDocumento63 páginasCook Meneses Jordi Robot Control Odometrico Estado Del ArteJhon MineroAún no hay calificaciones
- RA Unidad 4Documento9 páginasRA Unidad 4JosephAún no hay calificaciones
- SE 9A U1A4 Barradas Collado CesarDocumento20 páginasSE 9A U1A4 Barradas Collado CesarCesar Barradas colladoAún no hay calificaciones
- SABER 3 Unidad 2 ElizaldeDocumento13 páginasSABER 3 Unidad 2 ElizaldeJosé Manuel Ávila LaraAún no hay calificaciones
- Introduccion A La RoboticaDocumento5 páginasIntroduccion A La RoboticaGanimedes EstelarAún no hay calificaciones
- Figura 1. Procesos en La Fábrica de Papas Fritas: Fuente: SENA (2018)Documento4 páginasFigura 1. Procesos en La Fábrica de Papas Fritas: Fuente: SENA (2018)rurbano79Aún no hay calificaciones
- RCMN1Documento4 páginasRCMN1rafaAún no hay calificaciones
- Preguntas de ExamenDocumento4 páginasPreguntas de ExamenVictor Dérian MadridistaAún no hay calificaciones
- Tarea Busqueda Oportunidades de ProyectoDocumento7 páginasTarea Busqueda Oportunidades de Proyectojuan solerAún no hay calificaciones
- Reporte Final RoboticaDocumento34 páginasReporte Final RoboticaYairAún no hay calificaciones
- Manual PromodelDocumento27 páginasManual PromodelricardoaazAún no hay calificaciones
- Diseño y Control de Una Celula RobotizadaDocumento9 páginasDiseño y Control de Una Celula RobotizadaMisael Miguel Matos DíazAún no hay calificaciones
- Aporte Fase 4 Planeamiento Del ProyectoDocumento7 páginasAporte Fase 4 Planeamiento Del ProyectosergioAún no hay calificaciones
- Fase 4 Planeamiento Del Proyecto PAola OrtizDocumento7 páginasFase 4 Planeamiento Del Proyecto PAola Ortizpaola ortizAún no hay calificaciones
- Procedimiento Operativo Telescopaje-Grúa TorreDocumento18 páginasProcedimiento Operativo Telescopaje-Grúa TorreAlexisAún no hay calificaciones
- Fase 6Documento16 páginasFase 6carolina pereiraAún no hay calificaciones
- Aplicaciones de La RoboticaDocumento8 páginasAplicaciones de La RoboticaMilton GarciaAún no hay calificaciones
- Capítulo 1 - Fundamentos de La RoboticaDocumento22 páginasCapítulo 1 - Fundamentos de La RoboticaJorge Abraham Calvo MartinezAún no hay calificaciones
- Software OCTOPUS MININGDocumento15 páginasSoftware OCTOPUS MININGLuis RomeroAún no hay calificaciones
- Teleprogramacion e Interacción Con El EntornoDocumento25 páginasTeleprogramacion e Interacción Con El EntornoSergio agAún no hay calificaciones
- Exposición SomDocumento19 páginasExposición SomClaudia Machuca ChacónAún no hay calificaciones
- Requerimientos para La Integración de Los Robots en Procesos AutomatizadosDocumento6 páginasRequerimientos para La Integración de Los Robots en Procesos AutomatizadosJorgeRafaelOrozcoAcosta100% (1)
- Sistemas Roboticos TeleoperadosDocumento8 páginasSistemas Roboticos TeleoperadosjapeleAún no hay calificaciones
- Teoria Planeamiento (1) KPIDocumento22 páginasTeoria Planeamiento (1) KPIjose antonio paredes villalobosAún no hay calificaciones
- Paletizado Kuka KR16Documento13 páginasPaletizado Kuka KR16Andres AriasAún no hay calificaciones
- Sesion 15.2. MAQUINARIA MINERADocumento20 páginasSesion 15.2. MAQUINARIA MINERAOmar Miguel Ramirez VidalAún no hay calificaciones
- Grupo 207101 80 Proyecto de MantenimientoDocumento18 páginasGrupo 207101 80 Proyecto de MantenimientoEdward OrtizAún no hay calificaciones
- Medidas de Seguridad de Robots DepinturaDocumento12 páginasMedidas de Seguridad de Robots Depintura28030907Aún no hay calificaciones
- Actividad 1 Procesos de ManufacturaDocumento7 páginasActividad 1 Procesos de ManufacturaAlejandra MoralesAún no hay calificaciones
- AGENTESDocumento21 páginasAGENTESDORIAN RAMON MORAN CIFUENTESAún no hay calificaciones
- Automatización de La PerforaciónDocumento4 páginasAutomatización de La PerforaciónEdwin VerdugoAún no hay calificaciones
- La Robótica Es La Ciencia y La Tecnología de Los RobotsDocumento11 páginasLa Robótica Es La Ciencia y La Tecnología de Los Robotsramosportillo86Aún no hay calificaciones
- Criterios para La Seleccion de RobotsDocumento4 páginasCriterios para La Seleccion de RobotsĠėȑäȑďő GonzalezAún no hay calificaciones
- Am2-Sp-Prg-Sgi-03 Procedimiento de Operacion de Izaje Camion Pluma y GruaDocumento36 páginasAm2-Sp-Prg-Sgi-03 Procedimiento de Operacion de Izaje Camion Pluma y GruaCristian Delgado MolinaAún no hay calificaciones
- Trabajo1-Plan de Auscultación para La Construcción de Un Túnel-Miguel BalcazarDocumento34 páginasTrabajo1-Plan de Auscultación para La Construcción de Un Túnel-Miguel BalcazarMiguel Angel BalcazarAún no hay calificaciones
- SENATIDocumento61 páginasSENATIRonald Gerald Jara JuarezAún no hay calificaciones
- Actividad #1 RobóticaDocumento5 páginasActividad #1 RobóticaBryan TGAún no hay calificaciones
- Informe 3Documento12 páginasInforme 3Fabrizio Jesús Morales SalirrosasAún no hay calificaciones
- Aporte Fase 4 Planeamiento Del ProyectoDocumento9 páginasAporte Fase 4 Planeamiento Del ProyectoGustavo Londoño100% (1)
- Aplicaciónes de La RobóticaDocumento14 páginasAplicaciónes de La RobóticaJorge Armando Uicab CanulAún no hay calificaciones
- Control de Distancia INFORMEDocumento34 páginasControl de Distancia INFORMEMarcelo QuispeAún no hay calificaciones
- Electrónica Industrial AvanzadaDocumento15 páginasElectrónica Industrial AvanzadaChilo Enrique AntAún no hay calificaciones
- Preguntas Examen T8Documento4 páginasPreguntas Examen T8Jesus Mejias CortesAún no hay calificaciones
- 98 VegaDocumento9 páginas98 Vegaaugusto canchisAún no hay calificaciones
- Aprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraDe EverandAprendizaje Aplicado a Vehículos Terrestres: Mejora del rendimiento de los vehículos terrestres mediante el aprendizaje por visión por computadoraAún no hay calificaciones
- Precedencias, Linea de Separación y Cronograma de ObraDocumento4 páginasPrecedencias, Linea de Separación y Cronograma de ObraAlexander Garcia SantosAún no hay calificaciones
- HDS - Membrana de Curado en Base SolventeDocumento2 páginasHDS - Membrana de Curado en Base SolventeDavid Mgsbigking Torres SilvaAún no hay calificaciones
- Acueducto en Puerto CabelloDocumento3 páginasAcueducto en Puerto CabellojatsjetsAún no hay calificaciones
- Brocas ClevelandDocumento27 páginasBrocas Clevelandinthelightwork-scribdAún no hay calificaciones
- Ensayo - Recuperacion Del Lago Del CisneDocumento4 páginasEnsayo - Recuperacion Del Lago Del CisneAlejandra BlancoAún no hay calificaciones
- Problemas y Tensiones Que Enfrenta La Profesión Docente en La ActualidadDocumento5 páginasProblemas y Tensiones Que Enfrenta La Profesión Docente en La ActualidadDianaGsalazarAún no hay calificaciones
- Ensayo Sobre Inventario Permante y PeriódicoDocumento17 páginasEnsayo Sobre Inventario Permante y PeriódicoCarla Isabel Urzagaste CondoriAún no hay calificaciones
- Especificaciones Técnicas Knight PiesoldDocumento120 páginasEspecificaciones Técnicas Knight PiesoldAARON_1982Aún no hay calificaciones
- Gestion de La InformaciónDocumento2 páginasGestion de La InformaciónAlessandra Arteaga LsAún no hay calificaciones
- Afectividad y CogniciónDocumento3 páginasAfectividad y CogniciónKarina MenesesAún no hay calificaciones
- La Filosofía Administrativa Del Control Total de Calidad.Documento9 páginasLa Filosofía Administrativa Del Control Total de Calidad.Hugo VelazquezAún no hay calificaciones
- Tercer Producto ProteccionesDocumento19 páginasTercer Producto ProteccionesPaul ZapataAún no hay calificaciones
- IntegracionDocumento222 páginasIntegracionBrandon Yamir Farfan PasaperaAún no hay calificaciones
- De Parásitos, Mutaciones y Plagas - Jorge VolpiDocumento16 páginasDe Parásitos, Mutaciones y Plagas - Jorge VolpiMariana ShizukoAún no hay calificaciones
- 11 Instructivo AlDocumento3 páginas11 Instructivo AlAndres Alvarez RoblesAún no hay calificaciones
- Procedimiento de Inspecciones de Puestos de TrabajoDocumento4 páginasProcedimiento de Inspecciones de Puestos de TrabajoPedro Juan Pelaez Garcia100% (1)
- La Universidad Nacional Experimental de La Fuerza Armada BolivarianaDocumento7 páginasLa Universidad Nacional Experimental de La Fuerza Armada BolivarianaTicci NightAún no hay calificaciones
- Las TIC S Como Herramienta en La Contabilidad FinalDocumento15 páginasLas TIC S Como Herramienta en La Contabilidad FinalValentina ChavesAún no hay calificaciones
- Xiii Informe Gobierno Nacional - Julio 2018Documento442 páginasXiii Informe Gobierno Nacional - Julio 2018nidiad_15Aún no hay calificaciones
- Propiedades y Funciones Biológicas Del AguaDocumento1 páginaPropiedades y Funciones Biológicas Del AguaJonathan MichelAún no hay calificaciones
- Ejercicios T StudentDocumento5 páginasEjercicios T StudentcharlycamposAún no hay calificaciones