También podría gustarte
- Trabajo 2 - Laboratorio Maquinas RotativasDocumento7 páginasTrabajo 2 - Laboratorio Maquinas RotativasCarlosAún no hay calificaciones
- Motores Monofásicos y Aplicaciones IndustrialesDocumento10 páginasMotores Monofásicos y Aplicaciones IndustrialesronnyAún no hay calificaciones
- Guia de Practicas de Automatización Industrial-FimeDocumento60 páginasGuia de Practicas de Automatización Industrial-FimeRicardo Rodriguez Paredes100% (1)
- Automatismo Unidad 01 Semana 02Documento56 páginasAutomatismo Unidad 01 Semana 02José Fernando Guillermo mioAún no hay calificaciones
- Identificacion Fisica de Las Partes Constitutivas Del Generador de Corriente ContinuaDocumento5 páginasIdentificacion Fisica de Las Partes Constitutivas Del Generador de Corriente ContinuaEnrique Reynoso GarciaAún no hay calificaciones
- Prueba "Dinamofreno". - Lampara Estroboscopica - Analizador de Redes Fluke 435Documento23 páginasPrueba "Dinamofreno". - Lampara Estroboscopica - Analizador de Redes Fluke 435Marco V. ModumbaAún no hay calificaciones
- Precauciones en La Utilización de Los Variadores de FrecuenciaDocumento4 páginasPrecauciones en La Utilización de Los Variadores de Frecuenciarikt2008Aún no hay calificaciones
- Motor Casero EléctricoDocumento10 páginasMotor Casero EléctricoDARWIN ROJAS VALENCIAAún no hay calificaciones
- Motor CC Por Excitacion IndependienteDocumento17 páginasMotor CC Por Excitacion IndependienteAngel Ivan Gonzalez Mtz0% (2)
- Laboratorio 3 Maquinas Eléctricas 2Documento8 páginasLaboratorio 3 Maquinas Eléctricas 2Mark OnofreAún no hay calificaciones
- Laboratorio 9 Conversion 2Documento10 páginasLaboratorio 9 Conversion 2ALEJANDRO FIGUEROA HUARACALLOAún no hay calificaciones
- Unidad 5 - Máquinas Sincrónicas - 2011Documento30 páginasUnidad 5 - Máquinas Sincrónicas - 2011susanaAún no hay calificaciones
- Vdocuments - MX Identificacion Fisica de Las Partes Constitutivas Del Generador de Corriente ContinuaDocumento5 páginasVdocuments - MX Identificacion Fisica de Las Partes Constitutivas Del Generador de Corriente ContinuaEliasAún no hay calificaciones
- Reporte1 VirgiDocumento10 páginasReporte1 Virgi20309075Aún no hay calificaciones
- Clase 14. EditadasDocumento30 páginasClase 14. EditadasRony CalderonAún no hay calificaciones
- Actividad N°4 Gianpiero ZecchettiDocumento20 páginasActividad N°4 Gianpiero ZecchettiGianpieroZecchettiAún no hay calificaciones
- Arranque Directo Con Inversion de Giro de Motor de Induccion Trifasico Jaula de Ardilla (Cervantes Fernandez Mijael)Documento8 páginasArranque Directo Con Inversion de Giro de Motor de Induccion Trifasico Jaula de Ardilla (Cervantes Fernandez Mijael)CERVANTES FERNANDEZ MIJAELAún no hay calificaciones
- Lab 5 LABORATORIO DE CIRCUITOS Y MAQUINAS ELECTRICASDocumento14 páginasLab 5 LABORATORIO DE CIRCUITOS Y MAQUINAS ELECTRICASGuiovani Gomez100% (1)
- Seminario 2 ResumenDocumento5 páginasSeminario 2 ResumenEnmanuel De la PazAún no hay calificaciones
- Informe Controles Electricos N3Documento9 páginasInforme Controles Electricos N3Alejandro Mac PhersonAún no hay calificaciones
- Fallas en Motores SincronicosDocumento19 páginasFallas en Motores SincronicosSid OoAún no hay calificaciones
- Practica Maquinas SincronasDocumento12 páginasPractica Maquinas SincronasMarcos Ponce CelisAún no hay calificaciones
- Protección de Generadores Sincronos (Para La Expo)Documento51 páginasProtección de Generadores Sincronos (Para La Expo)pipus07Aún no hay calificaciones
- Tarea 3Documento8 páginasTarea 3jeffersonAún no hay calificaciones
- Mantenimiento A Motores ElectricosDocumento41 páginasMantenimiento A Motores ElectricosIvan Jacob80% (5)
- Lab5 Marcavillaca Pajuelo RiveroDocumento9 páginasLab5 Marcavillaca Pajuelo RiveroantonioAún no hay calificaciones
- Arrancadores ACDocumento7 páginasArrancadores ACErwin Geovanni Villalobos GutiérrezAún no hay calificaciones
- Generadores de Corriente ContinuaDocumento9 páginasGeneradores de Corriente ContinuaMeylin SilvaAún no hay calificaciones
- Mantenimiento A Motores Electricos DDDocumento41 páginasMantenimiento A Motores Electricos DDGael GutierrezAún no hay calificaciones
- Mantenimiento A Motores Electricos DDDocumento41 páginasMantenimiento A Motores Electricos DDGael GutierrezAún no hay calificaciones
- Diagnóstico y Reparacion Del Sistema de ArranqueDocumento20 páginasDiagnóstico y Reparacion Del Sistema de ArranqueJohn Fredy Martínez Cardona85% (34)
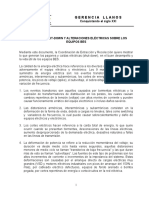
- Efectos Eléctricos Sobre Los BESDocumento7 páginasEfectos Eléctricos Sobre Los BESData TiganaAún no hay calificaciones
- Arranque de MotoresDocumento7 páginasArranque de MotoresEddy ArreolaAún no hay calificaciones
- Trabajo Motor Asincrono ListoDocumento10 páginasTrabajo Motor Asincrono ListoCamila Del PilarAún no hay calificaciones
- Pag 184-187 .. TrabajoDocumento7 páginasPag 184-187 .. TrabajoAyde Taype SEAún no hay calificaciones
- Electrotecnia IVDocumento11 páginasElectrotecnia IVRebeca Velasquez JaraAún no hay calificaciones
- Laboratorio 5 Maquinas Eléctricas 2Documento7 páginasLaboratorio 5 Maquinas Eléctricas 2Mark OnofreAún no hay calificaciones
- Arranque de MotoresDocumento6 páginasArranque de MotoresFabianOmarValdiviaPurizacaAún no hay calificaciones
- INFORME No 4Documento6 páginasINFORME No 4Diego A Marin VAún no hay calificaciones
- Sierra Valdivia Bryan Alonozo-Motor de Corriente DirectaDocumento5 páginasSierra Valdivia Bryan Alonozo-Motor de Corriente DirectaBryan SierraAún no hay calificaciones
- Arranque de Motores Asíncronos TrifásicosDocumento10 páginasArranque de Motores Asíncronos TrifásicosAlbert Martinez100% (1)
- Fenómeno Transitorio en Los Generadores SincrónicosDocumento12 páginasFenómeno Transitorio en Los Generadores SincrónicosChili BermudezAún no hay calificaciones
- Con V 3Documento8 páginasCon V 3Omar Cervantes GarcíaAún no hay calificaciones
- Elt-241 Lab 4Documento11 páginasElt-241 Lab 4Zack HayaAún no hay calificaciones
- Impacto de Las Corrientes de Secuencia Negativa en Los Generadores Sincronos Instalados en Sistemas IndustrialesDocumento6 páginasImpacto de Las Corrientes de Secuencia Negativa en Los Generadores Sincronos Instalados en Sistemas IndustrialesSamuel Ramos MondragónAún no hay calificaciones
- Maquinas Electricas - ApuntesDocumento45 páginasMaquinas Electricas - ApuntesXsendAún no hay calificaciones
- Corrinete de Secuencia NegativaDocumento6 páginasCorrinete de Secuencia NegativaTino RuizAún no hay calificaciones
- MegometroDocumento2 páginasMegometroYofer FalconAún no hay calificaciones
- AAcEXAM 2°PARCIAL Item8c HDocumento6 páginasAAcEXAM 2°PARCIAL Item8c HHector ulisesAún no hay calificaciones
- Informe Practica 4. Taller de ElectricidadDocumento15 páginasInforme Practica 4. Taller de ElectricidadCarlos LagunaAún no hay calificaciones
- Proteccion de Motores v3 TrifasicosDocumento25 páginasProteccion de Motores v3 Trifasicosjack6369100% (3)
- GeneradoresDocumento16 páginasGeneradoresHelder TejadaAún no hay calificaciones
- Capit 11 1 Operacion de Los GeneradoresDocumento59 páginasCapit 11 1 Operacion de Los GeneradoresLADY VANESSA VARGAS PARADAAún no hay calificaciones
- Maquinas Electricas 1.7-1.11Documento16 páginasMaquinas Electricas 1.7-1.11Jose Luis BuenoAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209De EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Calificación: 5 de 5 estrellas5/5 (2)
- Montaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109De EverandMontaje y mantenimiento de máquinas eléctricas rotativas. ELEE0109Aún no hay calificaciones
- electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209De Everandelectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Calificación: 4 de 5 estrellas4/5 (5)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Gilibert Seccion 3Documento2 páginasGilibert Seccion 3Jose SolisAún no hay calificaciones
- Factura de Venta - Exeq19735570 - 830087666Documento1 páginaFactura de Venta - Exeq19735570 - 830087666Jose SolisAún no hay calificaciones
- Actividad 8 Plan Estrategico OrganizacionalDocumento8 páginasActividad 8 Plan Estrategico OrganizacionalJose SolisAún no hay calificaciones
- InstrumentosDocumento13 páginasInstrumentosJose SolisAún no hay calificaciones
- El Tiempo (12-02-2022)Documento32 páginasEl Tiempo (12-02-2022)Jose SolisAún no hay calificaciones
- MASTER EbrochureDocumento8 páginasMASTER EbrochureJose SolisAún no hay calificaciones
- Link de Cartilla.Documento1 páginaLink de Cartilla.Jose SolisAún no hay calificaciones
- Actividad 6 - InformeDocumento8 páginasActividad 6 - InformeJose SolisAún no hay calificaciones
- Cuadro Conparativo de 3 Conflitos PDFDocumento13 páginasCuadro Conparativo de 3 Conflitos PDFJose SolisAún no hay calificaciones
- Esploracion de EmpresaDocumento1 páginaEsploracion de EmpresaJose SolisAún no hay calificaciones
- Act 4 Cuadro Comparativo y Indicadores de Gestion 2Documento11 páginasAct 4 Cuadro Comparativo y Indicadores de Gestion 2Jose SolisAún no hay calificaciones
- Para Llevar Acabo El Diagnostico Organizacional: EMPRESA/4835779.htmlDocumento1 páginaPara Llevar Acabo El Diagnostico Organizacional: EMPRESA/4835779.htmlJose SolisAún no hay calificaciones
- Act 1 - Critica y Mapa Conceptual - Analisis OrganizacionalDocumento10 páginasAct 1 - Critica y Mapa Conceptual - Analisis Organizacionaldaniela tenorio marinAún no hay calificaciones
- Éxito en DiagnosticoDocumento1 páginaÉxito en DiagnosticoJose SolisAún no hay calificaciones
- Act 4 Cuadro Comparativo y Indicadores de GestionDocumento1 páginaAct 4 Cuadro Comparativo y Indicadores de GestionJose SolisAún no hay calificaciones
- Esploracion de EmpresaDocumento1 páginaEsploracion de EmpresaJose SolisAún no hay calificaciones
- Preparando ProfecionalDocumento1 páginaPreparando ProfecionalJose SolisAún no hay calificaciones
- Preparando ProfecionalDocumento1 páginaPreparando ProfecionalJose SolisAún no hay calificaciones
- Mas A Ya Del NegocioDocumento1 páginaMas A Ya Del NegocioJose SolisAún no hay calificaciones
- Éxito en DiagnosticoDocumento1 páginaÉxito en DiagnosticoJose SolisAún no hay calificaciones
- Preparando ProfecionalDocumento1 páginaPreparando ProfecionalJose SolisAún no hay calificaciones
- Fortuna EmpresarialDocumento1 páginaFortuna EmpresarialJose SolisAún no hay calificaciones
- Plande MejoraDocumento1 páginaPlande MejoraJose SolisAún no hay calificaciones
- Éxito en DiagnosticoDocumento1 páginaÉxito en DiagnosticoJose SolisAún no hay calificaciones
- Plande MejoraDocumento1 páginaPlande MejoraJose SolisAún no hay calificaciones
- Motivacin FerscaDocumento1 páginaMotivacin FerscaJose SolisAún no hay calificaciones
- Motivacin FerscaDocumento1 páginaMotivacin FerscaJose SolisAún no hay calificaciones
- Dinidad EmpresadialDocumento1 páginaDinidad EmpresadialJose SolisAún no hay calificaciones
- Diagnostico OrganizacionalDocumento1 páginaDiagnostico OrganizacionalJose SolisAún no hay calificaciones
- Lamparas de Tungsteno-HalogenaDocumento17 páginasLamparas de Tungsteno-HalogenahernanaguileraAún no hay calificaciones
- Extinción Del Contrato de Trabajo (Grisolía)Documento19 páginasExtinción Del Contrato de Trabajo (Grisolía)DanielAún no hay calificaciones
- Práctica 3.12Documento9 páginasPráctica 3.12Elvis Alonso Diaz VizcardoAún no hay calificaciones
- Trabajo Del CursoDocumento36 páginasTrabajo Del CursoRaúl Enrique Dutari DutariAún no hay calificaciones
- Mi Cuerpo y MovimientoDocumento10 páginasMi Cuerpo y MovimientoBrendaAún no hay calificaciones
- Municipio Del Distrito Metropolitano de QuitoDocumento33 páginasMunicipio Del Distrito Metropolitano de QuitokettyAún no hay calificaciones
- 4A Codiseño Del Programa Analitico JEZBELDocumento6 páginas4A Codiseño Del Programa Analitico JEZBELKdt Kdt EducativoAún no hay calificaciones
- Pr-sst-11 Procedimiento de Trabajo Seguro de ExcavacionDocumento32 páginasPr-sst-11 Procedimiento de Trabajo Seguro de ExcavacionYesenia ArizaAún no hay calificaciones
- Trabajo de Etica - Sesion 4Documento12 páginasTrabajo de Etica - Sesion 4marisolAún no hay calificaciones
- 2BAC Preguntas SelectividadDocumento32 páginas2BAC Preguntas SelectividadGori ConejeroAún no hay calificaciones
- Manual Técnico Agua Ital VinilDocumento85 páginasManual Técnico Agua Ital VinilSERGIO CICCHITTIAún no hay calificaciones
- Manual Ministerios de Mayordomía PDFDocumento51 páginasManual Ministerios de Mayordomía PDFSamuel David Roncal Vargas100% (2)
- Plan de Desarrollo 2020 Tierralta V FinalDocumento377 páginasPlan de Desarrollo 2020 Tierralta V FinalAndres YanezAún no hay calificaciones
- Músculos y Articulaciones Del Tronco, Región Cardiaca y Región AxilarDocumento74 páginasMúsculos y Articulaciones Del Tronco, Región Cardiaca y Región AxilarJcaminoAún no hay calificaciones
- Semana 1 y 2 ENERO Media General y TécnicaDocumento30 páginasSemana 1 y 2 ENERO Media General y Técnicacruzmsotillor100% (1)
- Las Evaluaciones Educativas Que América Latina NecesitaDocumento6 páginasLas Evaluaciones Educativas Que América Latina NecesitaYaya EscobarAún no hay calificaciones
- Trastorno Del SueñoDocumento4 páginasTrastorno Del SueñoValdo CruzAún no hay calificaciones
- Caso Ritz PremioDocumento59 páginasCaso Ritz PremioYadira Salazar CaroAún no hay calificaciones
- 4ta Act Impo Estadal y MunicipDocumento8 páginas4ta Act Impo Estadal y MunicipYiisele SalGueiroAún no hay calificaciones
- MercadotecniaDocumento24 páginasMercadotecniaYeimy RaxicAún no hay calificaciones
- Guia Semana 3Documento3 páginasGuia Semana 3Marleth Lechuga SierraAún no hay calificaciones
- Trabajo Guia 8Documento36 páginasTrabajo Guia 8RUBENAún no hay calificaciones
- Examen Final - Semana 8 - RA - PRIMER BLOQUE-MICROECONOMIA - (GRUPO6)Documento10 páginasExamen Final - Semana 8 - RA - PRIMER BLOQUE-MICROECONOMIA - (GRUPO6)Coordinación TIC FénixAún no hay calificaciones
- Orientaciones para Observar y Describir La Clase de MatemáticasDocumento5 páginasOrientaciones para Observar y Describir La Clase de MatemáticasCarlos AyalaAún no hay calificaciones
- Foro 5 Salcedo Reátegui José RobertoDocumento2 páginasForo 5 Salcedo Reátegui José RobertoJoséSalcedoReáteguiAún no hay calificaciones
- Casas Editoriales Editores y Libros en Mexico PDFDocumento153 páginasCasas Editoriales Editores y Libros en Mexico PDFAmérica Con AcentoAún no hay calificaciones
- La Reacción Conservadora Después de La Primera Guerra Mundial Se Refiere a Un Período de Retroceso Hacia Valores y Políticas Más Tradicionales Que Se Produjo en Varias Partes Del Mundo Tras El Final Del Conflicto en 1918Documento3 páginasLa Reacción Conservadora Después de La Primera Guerra Mundial Se Refiere a Un Período de Retroceso Hacia Valores y Políticas Más Tradicionales Que Se Produjo en Varias Partes Del Mundo Tras El Final Del Conflicto en 1918Irene Díaz BurgaAún no hay calificaciones
- Primera Entrega-Semana 3. Proyecto Evaluacion de ProyectosDocumento19 páginasPrimera Entrega-Semana 3. Proyecto Evaluacion de ProyectosMaryi CamposAún no hay calificaciones