También podría gustarte
- Electrónica para Ingenieros-Transistores Bjts y Fets en DC 10.0Documento55 páginasElectrónica para Ingenieros-Transistores Bjts y Fets en DC 10.0HéctorGarcía100% (2)
- Ley de Ohm Circuitos en Serie y ParaleloDocumento22 páginasLey de Ohm Circuitos en Serie y ParaleloDanny F. Toledo Arias100% (1)
- Enlace de Datos CatDocumento44 páginasEnlace de Datos CatRonal Quispe Huaman0% (1)
- Guía L3 - Controlador LOGO! 8 Siemens - AADocumento18 páginasGuía L3 - Controlador LOGO! 8 Siemens - AAAlejandro AltamiranoAún no hay calificaciones
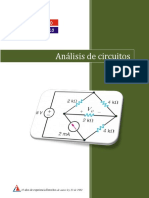
- Analisis de CircuitosDocumento42 páginasAnalisis de CircuitosJefferson Esquivel HincapieAún no hay calificaciones
- Simbologia Circuitos ElectricosDocumento2 páginasSimbologia Circuitos ElectricosAndres White100% (1)
- Monitoreo, control y adquisición de datos con arduino y visual basic .netDe EverandMonitoreo, control y adquisición de datos con arduino y visual basic .netAún no hay calificaciones
- Arcel Simbologia ElectricaDocumento7 páginasArcel Simbologia ElectricaJose Guatemal100% (1)
- Tarea Electricidad Mallas y Nodos (1) .Pdfsemana9Documento36 páginasTarea Electricidad Mallas y Nodos (1) .Pdfsemana9RUTH ISABEL ROJAS CLEVELAún no hay calificaciones
- TAREA Electricidad Grupo28 NudosDocumento35 páginasTAREA Electricidad Grupo28 NudosRUTH ISABEL ROJAS CLEVELAún no hay calificaciones
- Archivotareasilabo 2021528113326Documento11 páginasArchivotareasilabo 2021528113326ALDO MAURICIO NARANJO MORANAún no hay calificaciones
- Guía L2 - Lógica Cableada - Arranque Estrella Delta e Inversión de Giro - AADocumento7 páginasGuía L2 - Lógica Cableada - Arranque Estrella Delta e Inversión de Giro - AAAlejandro AltamiranoAún no hay calificaciones
- PCOMPLETADocumento7 páginasPCOMPLETABrandon Bautista SánchezAún no hay calificaciones
- Guía L2 - Temporizadores Con Retardo - DMDocumento11 páginasGuía L2 - Temporizadores Con Retardo - DMDavid Garfias AznarAún no hay calificaciones
- Guía L1 - Lógica Cableada - Tipos de EnclavamientoDocumento6 páginasGuía L1 - Lógica Cableada - Tipos de EnclavamientoAlejandro AltamiranoAún no hay calificaciones
- GuiaL5Display Del Controlador LOGO! 8-BFBSDocumento10 páginasGuiaL5Display Del Controlador LOGO! 8-BFBSBrandon Bautista Sánchez100% (1)
- Guía L1 - Controlador LOGO! 8 Siemens-GVDocumento20 páginasGuía L1 - Controlador LOGO! 8 Siemens-GVVictor VazquezAún no hay calificaciones
- L10 - Control de Luces - BFBSDocumento6 páginasL10 - Control de Luces - BFBSBrandon Bautista SánchezAún no hay calificaciones
- Guía L3 - Controlador LOGO! 8 de SiemensDocumento12 páginasGuía L3 - Controlador LOGO! 8 de SiemensDiego Fonseca MedinaAún no hay calificaciones
- Guía L10 - LOGO Web Editor - AplicaciónDocumento7 páginasGuía L10 - LOGO Web Editor - AplicaciónOscar TrejoAún no hay calificaciones
- Guía L5 - Sistemas Con Memoria - DGJDocumento22 páginasGuía L5 - Sistemas Con Memoria - DGJDaniel GómezAún no hay calificaciones
- Guía L4 - Temporizadores Con Retardo - AADocumento15 páginasGuía L4 - Temporizadores Con Retardo - AAAlejandro AltamiranoAún no hay calificaciones
- Auto 4 Parte 1Documento6 páginasAuto 4 Parte 1Nahum Delgado JimenezAún no hay calificaciones
- Guía T4 - Funciones Lógicas Básicas - AplicaciónDocumento3 páginasGuía T4 - Funciones Lógicas Básicas - AplicaciónAbrahan Cruz HernándezAún no hay calificaciones
- Guía T1 - Plataforma de Comunicación y Configuración Del Controlador IndustrialDocumento10 páginasGuía T1 - Plataforma de Comunicación y Configuración Del Controlador IndustrialJulián SánchezAún no hay calificaciones
- 3S ELC GP ControlDeProcesosDocumento28 páginas3S ELC GP ControlDeProcesosManuel ArdittoAún no hay calificaciones
- P5 KCDDocumento12 páginasP5 KCDKarla Michelle Pérez Trujillo100% (1)
- 4.1.1 Practico 2Documento3 páginas4.1.1 Practico 2Andrea NuñezAún no hay calificaciones
- Rúbrica Taller No.13 - Unidad IIIDocumento2 páginasRúbrica Taller No.13 - Unidad IIIChristian ValenciaAún no hay calificaciones
- ACP - Actividades Taller 11Documento3 páginasACP - Actividades Taller 11Miguel Sanchez PolonioAún no hay calificaciones
- 6.1.1 Practico 3uu9897Documento3 páginas6.1.1 Practico 3uu9897gab.ojedaAún no hay calificaciones
- Reporte 5Documento24 páginasReporte 5Cristian JiménezAún no hay calificaciones
- Rubrica - Indicador 1Documento1 páginaRubrica - Indicador 1Jhonny EspinozaAún no hay calificaciones
- 2.1.2 Guía Taller 5Documento4 páginas2.1.2 Guía Taller 5Coney GabrielAún no hay calificaciones
- 2-Informe N°2 Maquinas AcDocumento19 páginas2-Informe N°2 Maquinas Acdaniel24Aún no hay calificaciones
- Tarea 5 de Manuel ArdittoDocumento24 páginasTarea 5 de Manuel ArdittoManuel ArdittoAún no hay calificaciones
- Reporte Práctica 2Documento21 páginasReporte Práctica 2Cristian JiménezAún no hay calificaciones
- Ce DualDocumento2 páginasCe DualEDISON MARCELO RODRIGUEZ HERRERAAún no hay calificaciones
- 1813 - Ac - Matemática Ii (T) - Mañana - T2an - 00 - CF1 - Ramirez Costilla Fredy EnriqueDocumento6 páginas1813 - Ac - Matemática Ii (T) - Mañana - T2an - 00 - CF1 - Ramirez Costilla Fredy EnriqueAdam VargasAún no hay calificaciones
- Rubrica de EVAL Actividad-1 CORTE1 2022-IIDocumento1 páginaRubrica de EVAL Actividad-1 CORTE1 2022-IIALEXANDER MUÑOZ OLIVOAún no hay calificaciones
- Rubrica Problemario MetrologiaDocumento2 páginasRubrica Problemario MetrologiaCesar MarquezAún no hay calificaciones
- Mapa Conceptual Del Marco Logico - Iván ApunteDocumento8 páginasMapa Conceptual Del Marco Logico - Iván ApunteIvan Alex Apunte CallesAún no hay calificaciones
- Problemariocalculo 1Documento6 páginasProblemariocalculo 1Blanca ViteAún no hay calificaciones
- Manual MPN 02 Descargar Imprimir y Traer Todas Las Clases de MatemáticaDocumento110 páginasManual MPN 02 Descargar Imprimir y Traer Todas Las Clases de MatemáticaChristian AlvaAún no hay calificaciones
- Materiales de ConstrucciónDocumento1 páginaMateriales de ConstrucciónLinda HurtadoAún no hay calificaciones
- Planes 21-22 AutomDocumento19 páginasPlanes 21-22 AutomNick KlarkAún no hay calificaciones
- Planificacion Nivelacion Electronica Digital 2do FDocumento3 páginasPlanificacion Nivelacion Electronica Digital 2do FCristian TapiaAún no hay calificaciones
- Guía de Práctica N12 Contadores IntegradosDocumento7 páginasGuía de Práctica N12 Contadores IntegradosYODY YSIDRO LOZANO SUAREZAún no hay calificaciones
- Algoritmos y Estructura de Datos PC1 - SX34Documento4 páginasAlgoritmos y Estructura de Datos PC1 - SX34Andrea AponteCAún no hay calificaciones
- Dto G02 Rubrica Evaluacion Sesion 01 2024-1Documento1 páginaDto G02 Rubrica Evaluacion Sesion 01 2024-1fvargasca4Aún no hay calificaciones
- Asignación 11Documento5 páginasAsignación 11Cáceres ErnestoAún no hay calificaciones
- Práctica 7, Eq 4 LalOperaciones GrUnitariasDocumento10 páginasPráctica 7, Eq 4 LalOperaciones GrUnitariasCristian JiménezAún no hay calificaciones
- Mediciones Del Cilindro 4 Con AlexometroDocumento20 páginasMediciones Del Cilindro 4 Con AlexometrofranklinAún no hay calificaciones
- ACP - Actividades Taller 17Documento2 páginasACP - Actividades Taller 17Miguel Sanchez PolonioAún no hay calificaciones
- 1.4.3 Evaluación EA1Documento4 páginas1.4.3 Evaluación EA1Coney GabrielAún no hay calificaciones
- 2 - Intro Al Análisis de Errores y Su Propagación - 2S2022Documento9 páginas2 - Intro Al Análisis de Errores y Su Propagación - 2S2022Francisco MorenoAún no hay calificaciones
- Evaluación Sumativa 2 - Introducción A La ProgramaciónDocumento3 páginasEvaluación Sumativa 2 - Introducción A La Programacióntomas espinaAún no hay calificaciones
- Rubrica de Reporte 2023Documento1 páginaRubrica de Reporte 2023yeremi izquierdoAún no hay calificaciones
- Rúbrica OMINDocumento7 páginasRúbrica OMINJOSE GILBERTO CANO GREENEAún no hay calificaciones
- Evaluación - Final - MAQUINA E INSTRUMENTOS ABELDocumento9 páginasEvaluación - Final - MAQUINA E INSTRUMENTOS ABELPOLY COAT PERÚ SACAún no hay calificaciones
- Actividad Primer Corte-1 MatematicasDocumento3 páginasActividad Primer Corte-1 MatematicasLaura MartinezAún no hay calificaciones
- Actividad de Práctica - EvaluaciónDocumento6 páginasActividad de Práctica - Evaluaciónlina raquel vergara alfaroAún no hay calificaciones
- Practica 5 - Equipo 4Documento6 páginasPractica 5 - Equipo 4Cristian JiménezAún no hay calificaciones
- Di - Rubrica - Evaluacion - Examen Final - CadDocumento2 páginasDi - Rubrica - Evaluacion - Examen Final - CadYESSENIA AZUCENA SILVA OCHOAAún no hay calificaciones
- Actividad Primer Corte MatematicasDocumento3 páginasActividad Primer Corte MatematicasFredy SolanoAún no hay calificaciones
- Proteccion de Generadores UnacDocumento85 páginasProteccion de Generadores UnacDiego QuispeAún no hay calificaciones
- INFORME FINAL 1 Maquinas 3Documento9 páginasINFORME FINAL 1 Maquinas 3Alexander Quiroz CáceresAún no hay calificaciones
- FuenteDocumento3 páginasFuenteJosé Manuel Murillo DuarteAún no hay calificaciones
- Troubleshooting Manual (301-400) (1) .En - EsDocumento100 páginasTroubleshooting Manual (301-400) (1) .En - EsJavier Godoy GodoyAún no hay calificaciones
- 7.0 es-ES 2021-07 IOM.8117 PDFDocumento52 páginas7.0 es-ES 2021-07 IOM.8117 PDFIvanAún no hay calificaciones
- Efecto MeissnerDocumento6 páginasEfecto MeissnerHernando Magallanes GonzalezAún no hay calificaciones
- Hoja 1º EvaluaciónDocumento4 páginasHoja 1º EvaluaciónANTONIO JESÚS COSTA HERNÁNDEZAún no hay calificaciones
- Subestaciones Electric As de Alta Tension Aisladas en GasDocumento57 páginasSubestaciones Electric As de Alta Tension Aisladas en GasEmmanuel GonzalezAún no hay calificaciones
- Turbinas y VentiladoresDocumento5 páginasTurbinas y VentiladoresLuis VazquezAún no hay calificaciones
- Taller 1Documento3 páginasTaller 1Soto OscarAún no hay calificaciones
- Proceso Industrial Del VidrioDocumento29 páginasProceso Industrial Del VidrioKatty VRAún no hay calificaciones
- Memoria Comunicaciones y AlarmasDocumento19 páginasMemoria Comunicaciones y AlarmasGENT ENRIQUE CLEMENT CLEMENTAún no hay calificaciones
- Unidad2 ElectromagnetismoDocumento19 páginasUnidad2 ElectromagnetismoAdriana escobar hernandezAún no hay calificaciones
- Brochue Programacion DPL BasicoDocumento3 páginasBrochue Programacion DPL Basicoedwin javier guerra untojaAún no hay calificaciones
- LAB - 03 - VESPINOZA - Rev1Documento23 páginasLAB - 03 - VESPINOZA - Rev1pfespinozaAún no hay calificaciones
- Preguntas de RepasoDocumento6 páginasPreguntas de RepasoFranco Daniel VergaraAún no hay calificaciones
- Cables EléctricosDocumento5 páginasCables EléctricosJohannAún no hay calificaciones
- Clase 3 - 17.09.2020Documento14 páginasClase 3 - 17.09.2020Braulio GutiérrezAún no hay calificaciones
- Proyecto de Fisica y QuimicaDocumento8 páginasProyecto de Fisica y QuimicaMary PoloAún no hay calificaciones
- Items Descripcion UND Total: Resumen de Metrados Instalaciones ElectricasDocumento8 páginasItems Descripcion UND Total: Resumen de Metrados Instalaciones ElectricasDaysy Rios altamiranoAún no hay calificaciones
- Elt2641 Lab6 14Documento6 páginasElt2641 Lab6 14Romer BaltazarAún no hay calificaciones
- Vademécum de Cálculo en ElectrotecniaDocumento25 páginasVademécum de Cálculo en ElectrotecniaKeno Souza GensAún no hay calificaciones
- Generacion y Transporte Protecciones Electricas Generdor Sincro Parte #02Documento41 páginasGeneracion y Transporte Protecciones Electricas Generdor Sincro Parte #02Rodrigo QuintanillaAún no hay calificaciones
- Los Componentes Básicos de Una Unidad HidráulicaDocumento11 páginasLos Componentes Básicos de Una Unidad HidráulicaGerman MartinezAún no hay calificaciones
- Estación Satélite Qo-100 - Ea4bfk Iberradio 2019Documento34 páginasEstación Satélite Qo-100 - Ea4bfk Iberradio 2019Hugo CrespoAún no hay calificaciones