También podría gustarte
- Ejercicio e Tarea 2Documento10 páginasEjercicio e Tarea 2JHOAN ANDRES BOLANOS RUIZAún no hay calificaciones
- Tarea3 CarlosOchoaDocumento10 páginasTarea3 CarlosOchoaCarlos OchoaAún no hay calificaciones
- Tarea 3 - Grupo 17 - Ismer Miguel Cabarcas MartinezDocumento12 páginasTarea 3 - Grupo 17 - Ismer Miguel Cabarcas Martinezismercabarcas88Aún no hay calificaciones
- Tarea4 EspaciosVectorialesdocxDocumento13 páginasTarea4 EspaciosVectorialesdocxDavid Camilo Castañeda PardoAún no hay calificaciones
- Tarea 3 - Grupo-150 - Francisco VelandiaDocumento23 páginasTarea 3 - Grupo-150 - Francisco Velandialuisa100% (1)
- TAREA 2-Trabajo Colaborativo Algebra Lineal - 208046 - 16Documento26 páginasTAREA 2-Trabajo Colaborativo Algebra Lineal - 208046 - 16Alix Berrio Pertuz50% (2)
- Tarea 2. Vectores, Matrices y DeterminantesDocumento9 páginasTarea 2. Vectores, Matrices y DeterminantesPaulina RojasAún no hay calificaciones
- Tarea 1 - Funciones - Juan Nicolas MunevarDocumento10 páginasTarea 1 - Funciones - Juan Nicolas MunevarNicolas GarayAún no hay calificaciones
- Trabajo Colaborativo Fase 3 - Actividad Grupal 2 - Ciclo de La TareaDocumento18 páginasTrabajo Colaborativo Fase 3 - Actividad Grupal 2 - Ciclo de La TareaHelber BahoqueAún no hay calificaciones
- Ejercicios Literal BDocumento5 páginasEjercicios Literal BSebastian AmayaAún no hay calificaciones
- Calculo Diferencial Unad Estudiante 1, 2, 3, 4Documento14 páginasCalculo Diferencial Unad Estudiante 1, 2, 3, 4hernan herreraAún no hay calificaciones
- Tarea 2 Ejercicios DDocumento7 páginasTarea 2 Ejercicios DSANDRA ROJASAún no hay calificaciones
- Tarea2 - Vectores, Matrices y DeterminantesDocumento8 páginasTarea2 - Vectores, Matrices y DeterminantesJenni SantanaAún no hay calificaciones
- Unidad 3 - Fase 5 - Fortalecimiento de Los Conocimientos de Las Unidades Del CursoDocumento10 páginasUnidad 3 - Fase 5 - Fortalecimiento de Los Conocimientos de Las Unidades Del CursoJOHNIER FERNANDO GIRALDO CARDONAAún no hay calificaciones
- Tarea 3 Sistema de Ecuaciones Lineale, Rectas, Planos y Espacios Vectoriales - Grupo 100408 - 279 - Anyi Daniela TrujilloDocumento16 páginasTarea 3 Sistema de Ecuaciones Lineale, Rectas, Planos y Espacios Vectoriales - Grupo 100408 - 279 - Anyi Daniela Trujilloangie daniela trujillo0% (1)
- Tarea 4Documento10 páginasTarea 4susen mayerly malpica perezAún no hay calificaciones
- Actividad Unidad 3Documento5 páginasActividad Unidad 3alvaro andres0% (1)
- Tarea 1 El Concepto Integral Duvan VargasDocumento17 páginasTarea 1 El Concepto Integral Duvan VargasDuvan VargasAún no hay calificaciones
- Christianpoveda Tarea 2 301301 1141Documento13 páginasChristianpoveda Tarea 2 301301 1141Fabian Poveda100% (1)
- Ejercicio 2 y 3 AndresDocumento7 páginasEjercicio 2 y 3 Andresjeisson mejia100% (1)
- Tarea 2 Carlos Mauricio Vargas Ciceri Literal BDocumento13 páginasTarea 2 Carlos Mauricio Vargas Ciceri Literal BSistemas AsocapitalesAún no hay calificaciones
- Unidad 1 - Tarea 2 - Vectores, Matrices y DeterminantesDocumento9 páginasUnidad 1 - Tarea 2 - Vectores, Matrices y DeterminantesPaola BaqueroAún no hay calificaciones
- Tarea 3 - Aplicaciones de Las IntegralesDocumento8 páginasTarea 3 - Aplicaciones de Las IntegralesrcurielAún no hay calificaciones
- Tarea 3 - Sistemas de Ecuaciones LinealesDocumento9 páginasTarea 3 - Sistemas de Ecuaciones LinealesMARIA CAMILA VILLA MONTOYAAún no hay calificaciones
- 145 Unidad 1 Tarea 1 Calculo IntegralDocumento34 páginas145 Unidad 1 Tarea 1 Calculo IntegralYovany Forero100% (1)
- Anexo 1 - Tabla y Ejercicios Tarea 2Documento13 páginasAnexo 1 - Tabla y Ejercicios Tarea 2Maria Del Pilar Guarin Moreno Pilikguarinhotmail.comAún no hay calificaciones
- Fase 3 - Actividad Fundamentos de Determinantes y EspaciosDocumento5 páginasFase 3 - Actividad Fundamentos de Determinantes y Espaciosrafael100% (2)
- Ejercicio 5. Aplicación de La Teoría de Planos en La Solución de Problemas BásicosDocumento2 páginasEjercicio 5. Aplicación de La Teoría de Planos en La Solución de Problemas BásicosJefferssonFlorezMenesesAún no hay calificaciones
- Tarea 3 Sistema de Ecuaciones Lineales, Rectas y Planos - Gerson CosteroDocumento12 páginasTarea 3 Sistema de Ecuaciones Lineales, Rectas y Planos - Gerson CosteroGerson CosteroAún no hay calificaciones
- Juan Diego-Formato - Presentación - Tarea 2 Algebra LinealDocumento7 páginasJuan Diego-Formato - Presentación - Tarea 2 Algebra LinealJuan Diego Silva CastroAún no hay calificaciones
- Taller4-Espacios VectorialesDocumento15 páginasTaller4-Espacios VectorialesArlinson Useche ZamoraAún no hay calificaciones
- Trabajo Colaborativo Fase 3Documento15 páginasTrabajo Colaborativo Fase 3Marlene Domínguez CastroAún no hay calificaciones
- Unidad 3 - Tarea 4 JHAIDER PEREACDocumento12 páginasUnidad 3 - Tarea 4 JHAIDER PEREACjaider pereaAún no hay calificaciones
- Tarea 4 Ejercicios Unidad 3 Julian Avila Grupo 301301 383Documento5 páginasTarea 4 Ejercicios Unidad 3 Julian Avila Grupo 301301 383andrea33% (3)
- Ejercicios Calculo - UNADDocumento2 páginasEjercicios Calculo - UNADceiner0% (1)
- Tarea3 Luis Eduardo Caraballo Diaz Grupo 48Documento18 páginasTarea3 Luis Eduardo Caraballo Diaz Grupo 48Diego GalvisAún no hay calificaciones
- Anexo 1 - Tarea 1 Ejercicios CinemáticaDocumento12 páginasAnexo 1 - Tarea 1 Ejercicios CinemáticaSirley0% (1)
- Calculo I Tarea 1Documento8 páginasCalculo I Tarea 1Lisette Johana Silva ManosalvaAún no hay calificaciones
- Tarea - 4 - Algebra Lineal - Literal BDocumento13 páginasTarea - 4 - Algebra Lineal - Literal BElios Nieto MarquezAún no hay calificaciones
- Tarea4 Algebra LinealDocumento20 páginasTarea4 Algebra LinealDaniela SandovalAún no hay calificaciones
- Tarea 2 Juan MuñozDocumento19 páginasTarea 2 Juan MuñozmuerteAún no hay calificaciones
- Tarea3 208046 23 Neder FontalvoDocumento8 páginasTarea3 208046 23 Neder FontalvonederAún no hay calificaciones
- Paso 4 Ejercicios de La Sección 3.1 Calculo DiferencialDocumento10 páginasPaso 4 Ejercicios de La Sección 3.1 Calculo DiferencialI.E.R LA ESMERALDA Technology in teachingAún no hay calificaciones
- Tarea 2 - 457 - Maria Liliana LeyvaDocumento19 páginasTarea 2 - 457 - Maria Liliana Leyvamaria gonzalezAún no hay calificaciones
- Unidad 3 - Tarea 4 - Espacios VectorialesDocumento6 páginasUnidad 3 - Tarea 4 - Espacios Vectorialesandrea ordoñezAún no hay calificaciones
- Tarea - 2 - 203042 - 28Documento22 páginasTarea - 2 - 203042 - 28Laura Torres CastroAún no hay calificaciones
- Tarea 2 - FuncionesDocumento20 páginasTarea 2 - FuncionesDAVID FELIPE GONZALEZ SOSAAún no hay calificaciones
- Anexo 1-Tarea 3Documento9 páginasAnexo 1-Tarea 3Ximena MendietaAún no hay calificaciones
- Fase 1 - Conceptos Previos para El Cálculo IntegralDocumento6 páginasFase 1 - Conceptos Previos para El Cálculo Integralyudy alvarezAún no hay calificaciones
- Tarea 3 - Sistemas de Ecuaciones Lineales, Rectas y Plano (1263445)Documento14 páginasTarea 3 - Sistemas de Ecuaciones Lineales, Rectas y Plano (1263445)Sebastian David Armenta RomeroAún no hay calificaciones
- Ecuaciones Diferenciales, Tarea 3 Solución de Las Ecuaciones Diferenciales Mediante Transformada de Laplace, 2023-2Documento4 páginasEcuaciones Diferenciales, Tarea 3 Solución de Las Ecuaciones Diferenciales Mediante Transformada de Laplace, 2023-2ACADEMIA PLUS100% (1)
- Unidad 2 Tarea 2 Metodos de IntegracionDocumento5 páginasUnidad 2 Tarea 2 Metodos de IntegracionPaola CipaconAún no hay calificaciones
- Tarea 2 - Sistemas de Ecuaciones Lineales, Rectas y PlanosDocumento52 páginasTarea 2 - Sistemas de Ecuaciones Lineales, Rectas y PlanosKaren Julieth Arango Arias0% (1)
- Tarea 3-208046 56 JHON ROA.Documento8 páginasTarea 3-208046 56 JHON ROA.jhon edwin roa ruizAún no hay calificaciones
- Tarea 1 - El Concepto de Integral-Carmen Vargas..Documento10 páginasTarea 1 - El Concepto de Integral-Carmen Vargas..Carmen Elisa Mora100% (1)
- Tarea4 208046 377 Juan AyalaDocumento10 páginasTarea4 208046 377 Juan AyalaJuan camilo Ayala botiaAún no hay calificaciones
- Avances Calculo IntegralDocumento6 páginasAvances Calculo IntegralAlbeiro Sanchez GuarnizoAún no hay calificaciones
- Actividad Calculo NuevaDocumento49 páginasActividad Calculo NuevaMaira HereiraAún no hay calificaciones
- Aplicacion de Las Integrales - Yeiner PoloDocumento7 páginasAplicacion de Las Integrales - Yeiner PoloYęîner PolôAún no hay calificaciones
- Tarea2 100408 234Documento28 páginasTarea2 100408 234Jerikson Acero100% (1)
- Trabajo Grupal Metodos CerradosDocumento27 páginasTrabajo Grupal Metodos CerradosMateo Mogrovejo100% (1)
- 5º de PrimariaDocumento16 páginas5º de PrimariaMARIO OLIVERAAún no hay calificaciones
- 2a y 3a Leyes de La TermodinámicaDocumento48 páginas2a y 3a Leyes de La TermodinámicaWendyAvelarAún no hay calificaciones
- 13 Virtual Reporte Pendulo CompuestoDocumento27 páginas13 Virtual Reporte Pendulo CompuestoJessy HornaAún no hay calificaciones
- Volumen de Control FluidosDocumento7 páginasVolumen de Control FluidosJanss Bresner Perez IbañezAún no hay calificaciones
- Aprendemos Más Cosas Sobre FraccionesDocumento3 páginasAprendemos Más Cosas Sobre FraccionesSantiago FormigoAún no hay calificaciones
- El Principio de Pascal y Sus AplicacionesDocumento5 páginasEl Principio de Pascal y Sus AplicacionesItzel Cruz RamosAún no hay calificaciones
- La DerivadaDocumento4 páginasLa DerivadaBen Valca0% (1)
- Diseño de Filtros DescendentesDocumento22 páginasDiseño de Filtros DescendentesLEELAKER100% (5)
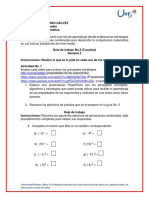
- Guía No. 2 Semana 2Documento3 páginasGuía No. 2 Semana 2Taca Mesia JoemessiAún no hay calificaciones
- Sustentación Trabajo Colaborativo - CB - SEGUNDO BLOQUE-ESTADISTICA II - (GRUPO PDFDocumento4 páginasSustentación Trabajo Colaborativo - CB - SEGUNDO BLOQUE-ESTADISTICA II - (GRUPO PDFEduardo DelaozAún no hay calificaciones
- Punto de EquilibrioDocumento22 páginasPunto de EquilibrioCarolina Baez DiazAún no hay calificaciones
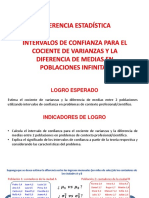
- Semana 2 - Sesión 3-Intervalo de Confianza para El Cociente de Varianzas y Diferencia de MediasDocumento17 páginasSemana 2 - Sesión 3-Intervalo de Confianza para El Cociente de Varianzas y Diferencia de MediasLUIS ALBERTO DE LA CRUZ MANTILLAAún no hay calificaciones
- Líneas NormalizadasDocumento5 páginasLíneas NormalizadasIvanAún no hay calificaciones
- Arboles y RedesDocumento38 páginasArboles y RedesKali LinuxAún no hay calificaciones
- Clase 2 - Test de BenzigerDocumento6 páginasClase 2 - Test de BenzigerroosbelAún no hay calificaciones
- Mate 3ro Diag. NivelaciónDocumento6 páginasMate 3ro Diag. NivelaciónRomero Aguilar Eleonai Wenote100% (1)
- Capitulo 4Documento18 páginasCapitulo 4William GomezAún no hay calificaciones
- Leyes de Newton - Wikipedia, La Enciclopedia LibreDocumento106 páginasLeyes de Newton - Wikipedia, La Enciclopedia LibreOmar SánchezAún no hay calificaciones
- Mikhail Tswett (1872-1919)Documento21 páginasMikhail Tswett (1872-1919)AstripAún no hay calificaciones
- 1459 Cálculo IIDocumento4 páginas1459 Cálculo IIAraceli Fernandez MendozaAún no hay calificaciones
- Ejercicios 1.1Documento4 páginasEjercicios 1.1Dimas Ramirez PortasAún no hay calificaciones
- Triangulación, Objetivos Conlcuiones Intro RecomendacionesDocumento2 páginasTriangulación, Objetivos Conlcuiones Intro RecomendacionesAlonso AlmestarAún no hay calificaciones
- Poligonos Triangulos y CuadrilaterosDocumento10 páginasPoligonos Triangulos y CuadrilaterosRuby MartinezAún no hay calificaciones
- Intervalos IndeterminadosDocumento2 páginasIntervalos IndeterminadosChristopher Blake50% (2)
- Informe Componente Práctico Antenas y PropagaciónDocumento31 páginasInforme Componente Práctico Antenas y PropagaciónjavieosAún no hay calificaciones
- Vectores Cap 3Documento55 páginasVectores Cap 3Mesias GuamantarioAún no hay calificaciones
- Analisis de Un Experimento Fisica LaboDocumento5 páginasAnalisis de Un Experimento Fisica LaboAndre RomeroAún no hay calificaciones
- Guia 4 DensidadDocumento3 páginasGuia 4 DensidadJohannaCardenas100% (1)