También podría gustarte
- Manual Pata El Robot MitsubishiDocumento43 páginasManual Pata El Robot Mitsubishidulcemar520Aún no hay calificaciones
- TRABAJO Aplicaciones de Numeros ComplejosDocumento1 páginaTRABAJO Aplicaciones de Numeros Complejosjoelesau654Aún no hay calificaciones
- Laboratorio N. 8 - Jezer ArochaDocumento8 páginasLaboratorio N. 8 - Jezer ArochaJezer ArochaAún no hay calificaciones
- Practica 8,9 y 11Documento30 páginasPractica 8,9 y 11Rocha113Aún no hay calificaciones
- Control Design 2Documento11 páginasControl Design 2jrse103001Aún no hay calificaciones
- Wiliam Sabino Humpiri Nina - Ec3-03-Artículo de InvestigaciónDocumento3 páginasWiliam Sabino Humpiri Nina - Ec3-03-Artículo de InvestigaciónGEORGE ELMER VILLALBA CHOQUEHUANCAAún no hay calificaciones
- Guía de Práctica 3Documento4 páginasGuía de Práctica 3danny_alfradAún no hay calificaciones
- Robotica Avance Proyecto I 3 DOFDocumento2 páginasRobotica Avance Proyecto I 3 DOFharry_gomez18Aún no hay calificaciones
- Manual Practicas PLCDocumento15 páginasManual Practicas PLCBrian M. Carrillo ChairezAún no hay calificaciones
- Guia 09 Asignacion Manejo de Funciones (Alexander Clarke 11R702)Documento9 páginasGuia 09 Asignacion Manejo de Funciones (Alexander Clarke 11R702)Alexander ClarkeAún no hay calificaciones
- RobG1 - AD23 - U2 - Prácticas 8911Documento33 páginasRobG1 - AD23 - U2 - Prácticas 8911Rocha113Aún no hay calificaciones
- RobG1 - EJ24 - BlasNietoJoseAlfredo - U2 - Cartesiano y AntropomorficoDocumento24 páginasRobG1 - EJ24 - BlasNietoJoseAlfredo - U2 - Cartesiano y AntropomorficoLaura RamirezAún no hay calificaciones
- Lab3 - OAC (DEBUG) 1Documento6 páginasLab3 - OAC (DEBUG) 1Samuel VillamilAún no hay calificaciones
- Sentencias de Repetición MatlabDocumento20 páginasSentencias de Repetición MatlabAldo SilveroAún no hay calificaciones
- Cartesiano y AntropomórficosDocumento21 páginasCartesiano y AntropomórficosNaresh1969Aún no hay calificaciones
- C1 IbarraAlbinoDocumento7 páginasC1 IbarraAlbinoLuis MorenoAún no hay calificaciones
- Informe LAB1 DefDocumento19 páginasInforme LAB1 DefcamiloAún no hay calificaciones
- Lab Nº6 - Cinematica Del Robot - Algoritmo Denavit-Hartenberg - 2017 - ImparDocumento5 páginasLab Nº6 - Cinematica Del Robot - Algoritmo Denavit-Hartenberg - 2017 - ImparMario Alberto Mamani Pariapaza0% (1)
- Universidad Veracruzana Facultad de Ingeniería Campus IxtaczoquitlánDocumento4 páginasUniversidad Veracruzana Facultad de Ingeniería Campus IxtaczoquitlánmeloordazAún no hay calificaciones
- Cuadernillo TP2 - Robótica 2012 V5Documento10 páginasCuadernillo TP2 - Robótica 2012 V5tommorelo2211Aún no hay calificaciones
- Práctica No 1 BisDocumento4 páginasPráctica No 1 BisAnonymous bfkQmc5TjAún no hay calificaciones
- Taller 05Documento9 páginasTaller 05Luis Eduardo RolonAún no hay calificaciones
- TALLER #2 Modulo 3 OAC PARA PARCIAL 3Documento6 páginasTALLER #2 Modulo 3 OAC PARA PARCIAL 3Delvis Joel CruzAún no hay calificaciones
- Taller #2 Repeticiones Alvarado, Del Rosario, Ardila 1IM111Documento8 páginasTaller #2 Repeticiones Alvarado, Del Rosario, Ardila 1IM111Rolando AlvaradoAún no hay calificaciones
- 2 2021 CIP200 Tarea FuncionesDocumento4 páginas2 2021 CIP200 Tarea FuncionesYennifer Nicole Alave FloresAún no hay calificaciones
- Lab 03 - Fundamentos de Matlab Ricardo y Suca BDocumento9 páginasLab 03 - Fundamentos de Matlab Ricardo y Suca BEnrique KawataAún no hay calificaciones
- Cinemática de Robots FinalDocumento2 páginasCinemática de Robots FinalJESUS AMADORAún no hay calificaciones
- Implementación de Simulink en Un Robot Paralelo - RobóticaDocumento26 páginasImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezAún no hay calificaciones
- Actividad N°3 Gianpiero ZecchettiDocumento8 páginasActividad N°3 Gianpiero ZecchettiGianpieroZecchettiAún no hay calificaciones
- RobG1 - AD23 - U2 - Cartesiano y AntropomórficoDocumento24 páginasRobG1 - AD23 - U2 - Cartesiano y AntropomórficoRocha113Aún no hay calificaciones
- Inicio de Programacion Por Computadora, UcsmDocumento13 páginasInicio de Programacion Por Computadora, UcsmJeankarlo Solórzano ValdiviaAún no hay calificaciones
- Mecanismo Pinza PDFDocumento11 páginasMecanismo Pinza PDFJulian ToscanoAún no hay calificaciones
- PROYECTO PNum 1p24 C2 3abr2024Documento3 páginasPROYECTO PNum 1p24 C2 3abr2024Ariel DPAún no hay calificaciones
- Guía de Laboratorio 3 Matlab I - OctaveDocumento4 páginasGuía de Laboratorio 3 Matlab I - OctaveMirko Alejandro Garcia SilvaAún no hay calificaciones
- Práctica 1Documento9 páginasPráctica 1l201010031Aún no hay calificaciones
- Reporte de Practicas Unidad 5 CDDocumento8 páginasReporte de Practicas Unidad 5 CDWilly Vazquez Lizbeth YazminAún no hay calificaciones
- Laboratorio N°15-Electr. IndDocumento4 páginasLaboratorio N°15-Electr. IndXiomaraAún no hay calificaciones
- Trabajo PR Actico N 1: Universidad Tecnol Ogica Nacional Facultad Regional Paran ADocumento8 páginasTrabajo PR Actico N 1: Universidad Tecnol Ogica Nacional Facultad Regional Paran AEnzo GonzalezAún no hay calificaciones
- Practica Algebra 1Documento10 páginasPractica Algebra 1Uri GrijalvaAún no hay calificaciones
- Practico 1 - 2013Documento12 páginasPractico 1 - 2013Pamela MonteblancoAún no hay calificaciones
- Evidencia ConocimientosDocumento13 páginasEvidencia ConocimientosAlejandro MenesesAún no hay calificaciones
- Introduccion Al Matlab PDFDocumento11 páginasIntroduccion Al Matlab PDFLuis SuarezAún no hay calificaciones
- Lab #1 Modos de DireccionamientoDocumento6 páginasLab #1 Modos de DireccionamientoAder Hariel Treminio MontoyaAún no hay calificaciones
- Lab 02 - ComputacionalDocumento13 páginasLab 02 - ComputacionaljoseAún no hay calificaciones
- Curso Basico Pic16f877Documento159 páginasCurso Basico Pic16f877Monsibais D IvánAún no hay calificaciones
- Investigacion Ansoft DesignerDocumento10 páginasInvestigacion Ansoft DesignerDiego MeraAún no hay calificaciones
- Trabajo Final EstaticaDocumento22 páginasTrabajo Final EstaticaAnderson OrtizAún no hay calificaciones
- Laboratorio N. 7 - Jezer ArochaDocumento6 páginasLaboratorio N. 7 - Jezer ArochaJezer ArochaAún no hay calificaciones
- PRÁCTICA 3 Paul Torres JaraDocumento15 páginasPRÁCTICA 3 Paul Torres JaraMenaly LuzuriagaAún no hay calificaciones
- Practica 1 AnsysDocumento15 páginasPractica 1 AnsysJoe BhananassAún no hay calificaciones
- Introduccion A LabviewDocumento22 páginasIntroduccion A LabviewBryan Alexander100% (1)
- Laboratorio 5 CuestionarioDocumento4 páginasLaboratorio 5 CuestionarioYuli Fernanda Alpala CuaspaAún no hay calificaciones
- SIMULACIÓN - lAB1Documento15 páginasSIMULACIÓN - lAB1Sergio Andres Motta MejiaAún no hay calificaciones
- Proyecto FinalDocumento5 páginasProyecto Finalemilio roaAún no hay calificaciones
- Laboratorio No.11Documento5 páginasLaboratorio No.11dafnne solanoAún no hay calificaciones
- Informe Prac 3Documento7 páginasInforme Prac 3Dännŷ FêrnândëzAún no hay calificaciones
- Guia Lab 3 Bases Matematicas IDocumento5 páginasGuia Lab 3 Bases Matematicas IAndrea MorenoAún no hay calificaciones
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Eliminación de líneas ocultas: Revelando lo invisible: secretos de la visión por computadoraDe EverandEliminación de líneas ocultas: Revelando lo invisible: secretos de la visión por computadoraAún no hay calificaciones
- Instrumentación electrónica aplicada: Prácticas de laboratorioDe EverandInstrumentación electrónica aplicada: Prácticas de laboratorioCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Industrial RobotsDocumento10 páginasIndustrial RobotsJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- UPG Rubrica Programa PLC Primer Parcial Celda MPSDocumento7 páginasUPG Rubrica Programa PLC Primer Parcial Celda MPSJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Reporte Pieza FrezaDocumento7 páginasReporte Pieza FrezaJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- PLantilla Ishikawa en Word 03Documento1 páginaPLantilla Ishikawa en Word 03JOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Control Nivel 22 Sept.Documento2 páginasControl Nivel 22 Sept.JOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Convertir Decimal A Binario DFDDocumento1 páginaConvertir Decimal A Binario DFDJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Programa de Educación Continua Enero - Abril 2023: CursosDocumento10 páginasPrograma de Educación Continua Enero - Abril 2023: CursosJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Practica Con FresaDocumento8 páginasPractica Con FresaJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- SNyH - PRACTICA 7 - 110634Documento12 páginasSNyH - PRACTICA 7 - 110634JOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Cuestionario de SemiconductoresDocumento5 páginasCuestionario de SemiconductoresJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- Grupo BimboDocumento2 páginasGrupo BimboJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
- SemiconductoresDocumento6 páginasSemiconductoresJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones
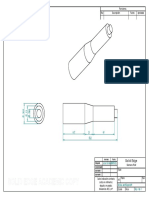
- Revisiones Rev Descripción Fecha Aprobado: Solid EdgeDocumento1 páginaRevisiones Rev Descripción Fecha Aprobado: Solid EdgeJOSÉ FERNANDO GONZÁLEZ OLVERA.Aún no hay calificaciones