También podría gustarte
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasDe EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- 1 - IE415 (Conceptos Básicos de Sistemas de Control) PDFDocumento37 páginas1 - IE415 (Conceptos Básicos de Sistemas de Control) PDFCarlos A. BanegasAún no hay calificaciones
- 1.1 Modelación de Sistemas Físicos 2015-1Documento44 páginas1.1 Modelación de Sistemas Físicos 2015-1David Sarmiento CordovaAún no hay calificaciones
- Control Moderno y Óptimo Semana 1Documento38 páginasControl Moderno y Óptimo Semana 1Christian Josef Ugarte GaliciaAún no hay calificaciones
- Controles AutomaticosDocumento70 páginasControles Automaticosfrankz89100% (1)
- Preguntas sobre sistemas de control y automatizaciónDocumento4 páginasPreguntas sobre sistemas de control y automatizaciónAbraham SosaAún no hay calificaciones
- Aplicaciones de La Hidráulica ProporcionalDocumento4 páginasAplicaciones de La Hidráulica Proporcionaldg50000% (1)
- Cuaderno de Control (1 Parcial)Documento50 páginasCuaderno de Control (1 Parcial)Behamin Carlos100% (1)
- S1 - Sistemas de Control Electrónico - Sistemas de ControlDocumento36 páginasS1 - Sistemas de Control Electrónico - Sistemas de ControlReyes RtrAún no hay calificaciones
- Teoría de ControlDocumento58 páginasTeoría de ControlVladimir MendozaAún no hay calificaciones
- Control PID para Un Motor DC Controlado Por ArmaduraDocumento17 páginasControl PID para Un Motor DC Controlado Por ArmaduraRicharson OchoaAún no hay calificaciones
- Formato - Laboratorio Sistemas de Control Practica 2Documento14 páginasFormato - Laboratorio Sistemas de Control Practica 2Alexander UribeAún no hay calificaciones
- Control giro motorDocumento5 páginasControl giro motorJuan CalderonAún no hay calificaciones
- Ing CTRLDocumento4 páginasIng CTRL123drk010Aún no hay calificaciones
- Tarea 1 Dinamica de ProcesosDocumento9 páginasTarea 1 Dinamica de ProcesosViviana Bautista NolascoAún no hay calificaciones
- Definición y Características de Un Control DistribuidoDocumento29 páginasDefinición y Características de Un Control DistribuidoInkietohh Gallegos100% (4)
- Sistemas de ControlDocumento18 páginasSistemas de Controlroro gómezAún no hay calificaciones
- Simulacion de Sistemas de ControlDocumento27 páginasSimulacion de Sistemas de ControlAndrea LedesmaAún no hay calificaciones
- Unidad I Control IDocumento65 páginasUnidad I Control ILUIS FELIPE TRINIDAD GUZMANAún no hay calificaciones
- Semana 1.1 IntroduccionDocumento56 páginasSemana 1.1 Introduccionvaleria mendozaAún no hay calificaciones
- Ing Control IntroDocumento35 páginasIng Control IntrojuanAún no hay calificaciones
- Deber 1Documento8 páginasDeber 1Danny MartínezAún no hay calificaciones
- Servo SistemasDocumento11 páginasServo SistemasNoemí CórdobaAún no hay calificaciones
- ForoDocumento4 páginasForoAliz AnmedAún no hay calificaciones
- Def Los Sig Terminos-ABUITRONDocumento5 páginasDef Los Sig Terminos-ABUITRONArthur Alexis Buitron DurandAún no hay calificaciones
- Diseño de Sistemas de Control Siso en TiempoDocumento15 páginasDiseño de Sistemas de Control Siso en TiempoFrancis FarfanAún no hay calificaciones
- Elementos de Un Sistema de Control.Documento12 páginasElementos de Un Sistema de Control.Victor ReyesAún no hay calificaciones
- SERVOSISTEMASDocumento5 páginasSERVOSISTEMASCarlos VAún no hay calificaciones
- Control Automático: Conceptos BásicosDocumento4 páginasControl Automático: Conceptos BásicosGenaro ortega aguirreAún no hay calificaciones
- Sistema de Control AutomaticoDocumento8 páginasSistema de Control Automaticoivanrdz11Aún no hay calificaciones
- Sistema Lazo Abierto y CerradoDocumento6 páginasSistema Lazo Abierto y Cerradoaide natalyAún no hay calificaciones
- Modelos líneas espera control asistidoDocumento4 páginasModelos líneas espera control asistidoJOSE JAVIER GARCIA GUEVARAAún no hay calificaciones
- Qué Es Control - MergedDocumento74 páginasQué Es Control - Mergedjhon.simba2014Aún no hay calificaciones
- Informe Examen FinalDocumento15 páginasInforme Examen FinalGustavo CeccarelliAún no hay calificaciones
- Actividad 1 Teoría de ControlDocumento5 páginasActividad 1 Teoría de ControlJair AriasAún no hay calificaciones
- p3 Resumen Sistemas DinamicosDocumento4 páginasp3 Resumen Sistemas DinamicosEdwin GuzmánAún no hay calificaciones
- Modelo Estructural de Un Sistema AutomatizadoDocumento7 páginasModelo Estructural de Un Sistema AutomatizadoLuis Guillermo Peña RodríguezAún no hay calificaciones
- Presentación 1.1 - Introduccion Sistemas de Control DigitalDocumento26 páginasPresentación 1.1 - Introduccion Sistemas de Control DigitalKady Gisselle GomézAún no hay calificaciones
- Capitulo 1 PDFDocumento36 páginasCapitulo 1 PDFJonatan Eduardo Rodriguez ZavalaAún no hay calificaciones
- AutomatizaciónDocumento56 páginasAutomatizaciónFavio QuijadaAún no hay calificaciones
- Modos de control P, I y DDocumento42 páginasModos de control P, I y DKevin LopezAún no hay calificaciones
- Ingenieria de Control ClasicoDocumento45 páginasIngenieria de Control ClasicocosasdeinterAún no hay calificaciones
- Sistemas de control de procesosDocumento13 páginasSistemas de control de procesosSantiago RiveraAún no hay calificaciones
- Automatizacion IndustrialDocumento0 páginasAutomatizacion Industrialberby...100% (1)
- 1 PDFDocumento8 páginas1 PDFMario CasasAún no hay calificaciones
- Practicas ControlDocumento10 páginasPracticas ControlPedro J. Unda MtzAún no hay calificaciones
- Sistemas de ControlDocumento22 páginasSistemas de Controlwinfer90Aún no hay calificaciones
- Fundamentos de Sistemas de ControlDocumento42 páginasFundamentos de Sistemas de ControlMaldito Sudaca100% (3)
- Capitulo I Control I 2019 IIDocumento25 páginasCapitulo I Control I 2019 IIWilinthon Segura Ortega100% (1)
- Loa Automa 1 Ingenieria de Control Moderna-Ogata 105155Documento56 páginasLoa Automa 1 Ingenieria de Control Moderna-Ogata 105155Lucho MaldonadoAún no hay calificaciones
- Práctica 2 Control Automático: Nombre: Danan Elora Díaz Sánchez Materia: Laboratorio PRQ211Documento6 páginasPráctica 2 Control Automático: Nombre: Danan Elora Díaz Sánchez Materia: Laboratorio PRQ211Danan DiazAún no hay calificaciones
- Controladores industrialesDocumento6 páginasControladores industrialesJung Angy Lee100% (1)
- Medir para controlar sistemasDocumento75 páginasMedir para controlar sistemasarturoAún no hay calificaciones
- CONTROL AUTOMÁTICO - Galvez (Autoguardado)Documento5 páginasCONTROL AUTOMÁTICO - Galvez (Autoguardado)Fernando D. GalvezAún no hay calificaciones
- Aplicaciones de Las Transformaciones de Laplace en Sistemas de Control y A Un Circuito RLCDocumento4 páginasAplicaciones de Las Transformaciones de Laplace en Sistemas de Control y A Un Circuito RLCIsrrael SaraguroAún no hay calificaciones
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311De EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Calificación: 4.5 de 5 estrellas4.5/5 (2)
- Montaje de instalaciones automatizadas. ELEE0109De EverandMontaje de instalaciones automatizadas. ELEE0109Aún no hay calificaciones
- UF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasDe EverandUF1670 - Reparación de equipos mecánicos y eléctricos de plantas de tratamiento de agua y plantas depuradorasCalificación: 5 de 5 estrellas5/5 (1)
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311De EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Calificación: 2 de 5 estrellas2/5 (1)
- Plano DrenajeDocumento1 páginaPlano DrenajekainredemtorAún no hay calificaciones
- Comprensión y Redacción de Textos PC1Documento6 páginasComprensión y Redacción de Textos PC1KEYMER ARAMIX MIÑAN TRELLESAún no hay calificaciones
- Ev Diagnostica Simón Bolivar WordDocumento4 páginasEv Diagnostica Simón Bolivar Wordhectorsic133Aún no hay calificaciones
- Mapa Conceptual Rol Del Docente y El Estudiante PDFDocumento1 páginaMapa Conceptual Rol Del Docente y El Estudiante PDFYURIBETH LOPEZ50% (2)
- Precios ConstruccionDocumento22 páginasPrecios ConstruccionAlexandra TeránAún no hay calificaciones
- Informe Working ModelDocumento14 páginasInforme Working Modeltafur romero thalismanAún no hay calificaciones
- Aplicacion Del Modelo TPACK A Una Actividad de ClaseDocumento3 páginasAplicacion Del Modelo TPACK A Una Actividad de ClasePoloalex Paxtian PT100% (1)
- Ejemplo de Reporte de LaboratorioDocumento8 páginasEjemplo de Reporte de LaboratorioAlex RodriguezAún no hay calificaciones
- CTM Ensayo 2Documento2 páginasCTM Ensayo 2Robbinson Segura GAún no hay calificaciones
- Seguridad Informática en Las Organizaciones.Documento5 páginasSeguridad Informática en Las Organizaciones.ALBERTINA GARIZAO PEINADOAún no hay calificaciones
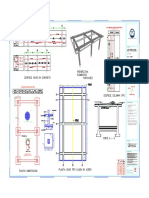
- Caseta eléctrica diseño columnas cimentación losa pisoDocumento1 páginaCaseta eléctrica diseño columnas cimentación losa pisoDaniel RestrepoAún no hay calificaciones
- Apuntes Parcial 2Documento22 páginasApuntes Parcial 2SEBASTIAN ARISTONDO PEREZAún no hay calificaciones
- Resultados Guacamayo CaspiDocumento4 páginasResultados Guacamayo CaspiArnold Zenteno VeraAún no hay calificaciones
- Alicia - Reyes - Segura 5Documento5 páginasAlicia - Reyes - Segura 5ali97Aún no hay calificaciones
- Estimación de parámetros poblacionales mediante muestreoDocumento4 páginasEstimación de parámetros poblacionales mediante muestreoJoseAlfredoOrtegaOrtegaAún no hay calificaciones
- Defimonitor Evo 23186 Es Evo A 042013 PDFDocumento16 páginasDefimonitor Evo 23186 Es Evo A 042013 PDFDuvan Ricaurte0% (1)
- Scratch MarioDocumento10 páginasScratch MarioPEDROAún no hay calificaciones
- Proyecto FinalDocumento12 páginasProyecto Finaldvare204208Aún no hay calificaciones
- Introducción a la suma y resta de polinomios enDocumento5 páginasIntroducción a la suma y resta de polinomios enEdith STAún no hay calificaciones
- Tarea FundamentosDocumento31 páginasTarea FundamentosPaz SamaniegoAún no hay calificaciones
- (Presentación) Actividades Del Mantenimiento Industrial (Int Al Mntto) (3)Documento21 páginas(Presentación) Actividades Del Mantenimiento Industrial (Int Al Mntto) (3)ci3994449Aún no hay calificaciones
- Licitaciones de SoftwareDocumento7 páginasLicitaciones de SoftwareAshley ZuluagaAún no hay calificaciones
- Equipos lechería S/730kDocumento5 páginasEquipos lechería S/730kMarco CunzaAún no hay calificaciones
- Grupo 102025 - 20 Individual Diagnostico EmpresarialDocumento7 páginasGrupo 102025 - 20 Individual Diagnostico Empresarialwilson paalacioAún no hay calificaciones
- Definición y pilares de la dirección estratégicaDocumento13 páginasDefinición y pilares de la dirección estratégicaIrina ArquezAún no hay calificaciones
- P07 POO HerenciaDocumento14 páginasP07 POO HerenciaAGUSTIN ESTUDILLO MARQUEZAún no hay calificaciones
- Carta Comercial Modelos Por Varios AutoresDocumento12 páginasCarta Comercial Modelos Por Varios AutoresSONIAFERNCAún no hay calificaciones
- HDV BerlidesDocumento15 páginasHDV Berlidesirene gutierrezAún no hay calificaciones
- S10.s1 MaderaDocumento4 páginasS10.s1 MaderaMichelle HerreraAún no hay calificaciones
- INFORME CASO ANCON_LPS INGENIERIADocumento11 páginasINFORME CASO ANCON_LPS INGENIERIAAYERSO CHACONAún no hay calificaciones