También podría gustarte
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
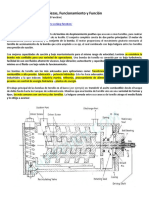
- Bombas de Tornillo - Sus Piezas - Funcionamiento y FunciónDocumento7 páginasBombas de Tornillo - Sus Piezas - Funcionamiento y FunciónRicardo ViloriaAún no hay calificaciones
- Vicente Beltran Anglada - Las Fuerzas Ocultas de La Naturaleza1Documento114 páginasVicente Beltran Anglada - Las Fuerzas Ocultas de La Naturaleza1amormem100% (5)
- Para entender el código de red: Un análisis en torno a su implementaciónDe EverandPara entender el código de red: Un análisis en torno a su implementaciónAún no hay calificaciones
- Unidad 6 PolimerosDocumento18 páginasUnidad 6 PolimerosYugular100% (1)
- Calculo de Rigidez Por El Método de WilburDocumento13 páginasCalculo de Rigidez Por El Método de Wilburjulinho flores alonso100% (1)
- Plantilla AFMPI FES Zaragoza Profesora Irma.Documento14 páginasPlantilla AFMPI FES Zaragoza Profesora Irma.Jesus VillanuevaAún no hay calificaciones
- Guia 4 Ciencias 3°aDocumento4 páginasGuia 4 Ciencias 3°aYulieth HeToAún no hay calificaciones
- Informe-Proyecto-Final Instrumentacion y Control PIDDocumento5 páginasInforme-Proyecto-Final Instrumentacion y Control PIDMiguel Angel Gómez SánchezAún no hay calificaciones
- Modal identification using smart mobile sensing unitsDe EverandModal identification using smart mobile sensing unitsAún no hay calificaciones
- Mu WebDocumento8 páginasMu WebYuritza MaldonadoAún no hay calificaciones
- Informe Final DinamicosDocumento12 páginasInforme Final Dinamicosmorenomagda028Aún no hay calificaciones
- Fuzzy Ball BeamDocumento6 páginasFuzzy Ball BeamJhinson Edgar CoyagoAún no hay calificaciones
- Control difuso de péndulo invertido rotacionalDocumento20 páginasControl difuso de péndulo invertido rotacionalGerald Dalbie Solís100% (1)
- Lab 6 CTR 2Documento4 páginasLab 6 CTR 2Felipe MoreraAún no hay calificaciones
- SegwayDocumento7 páginasSegwayScott MelgarejoAún no hay calificaciones
- Modelación, Simulación y Control de Un Levitador NeumáticoDocumento9 páginasModelación, Simulación y Control de Un Levitador NeumáticoAdalberto LazariniAún no hay calificaciones
- Proyecto de Catedra Suspension MagenticoDocumento14 páginasProyecto de Catedra Suspension MagenticocarlosAún no hay calificaciones
- BibliografiaDocumento8 páginasBibliografiaMiguel Mamani RojasAún no hay calificaciones
- Control posición balancín motor-héliceDocumento15 páginasControl posición balancín motor-hélicemanuel cruzAún no hay calificaciones
- Ensayo Articulo 2 Marco Serrano QuispeDocumento5 páginasEnsayo Articulo 2 Marco Serrano Quispemarco3000xxxAún no hay calificaciones
- Co st134 06Documento10 páginasCo st134 06EsmfAún no hay calificaciones
- Diseño de Un Controlador Fuzzy para Un Sistema de Levitación Magnética Mediante Sensores HallDocumento9 páginasDiseño de Un Controlador Fuzzy para Un Sistema de Levitación Magnética Mediante Sensores HallPérez Dionicio Néstor ArturoAún no hay calificaciones
- RetrieveDocumento79 páginasRetrieveYesi NievasAún no hay calificaciones
- Proyecto Control IntelDocumento3 páginasProyecto Control IntelCamilo A. Erazo RomànAún no hay calificaciones
- BalancinMotorHelice PDFDocumento15 páginasBalancinMotorHelice PDFSebastianAún no hay calificaciones
- Informe Avance 1Documento9 páginasInforme Avance 1ANDRES STEVEN MORALES RODRIGUEZAún no hay calificaciones
- 19 Analisis y Resultados Experimentales de Controladores deDocumento7 páginas19 Analisis y Resultados Experimentales de Controladores deAndresPrieto10Aún no hay calificaciones
- Art RNA CruzY NuñezSDocumento6 páginasArt RNA CruzY NuñezSJOSE NUÑEZ MOROCHOAún no hay calificaciones
- Informe HidráulicaDocumento21 páginasInforme HidráulicaOscar Peña0% (1)
- Implementacion de Controladores Por RealimentacionDocumento9 páginasImplementacion de Controladores Por RealimentacionJulio SalasAún no hay calificaciones
- Practica 4Documento2 páginasPractica 4Leticia Gabriela Vite RamirezAún no hay calificaciones
- Topicos Lab 3Documento12 páginasTopicos Lab 3est.daniel.bautista3Aún no hay calificaciones
- Informe FinalDocumento4 páginasInforme FinalAngie PerezAún no hay calificaciones
- Formato Levantamiento Informacion RevistaDocumento2 páginasFormato Levantamiento Informacion RevistajessiaAún no hay calificaciones
- Informe Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFDocumento5 páginasInforme Proyecto Final Instrumentaci N y Control Control PID para Un Sistema Ball and Beam 2 PDFMiguel Angel GomezAún no hay calificaciones
- Informe #2 Labo Control Discreto. IeeeDocumento3 páginasInforme #2 Labo Control Discreto. IeeeStalin MiguelAún no hay calificaciones
- Control de Un Sistema Esfera - RielDocumento8 páginasControl de Un Sistema Esfera - Rielest.maicol.finoAún no hay calificaciones
- Control de posición lineal para dron con sensor ultrasónico y PIDDocumento3 páginasControl de posición lineal para dron con sensor ultrasónico y PIDCristian Pavas100% (1)
- Incidencia Del Algoritmo de Integración de Las Velocidades Angulares en El Proceso de Calibración Del Giroscopio de Una Unidad de Medida Inercial IMUDocumento8 páginasIncidencia Del Algoritmo de Integración de Las Velocidades Angulares en El Proceso de Calibración Del Giroscopio de Una Unidad de Medida Inercial IMUFabian VergaraAún no hay calificaciones
- Control de Posición de Balancín Con Motor y HéliceDocumento9 páginasControl de Posición de Balancín Con Motor y HéliceGabriel AyalaAún no hay calificaciones
- Proyecto FinalDocumento4 páginasProyecto FinaledwcaranAún no hay calificaciones
- Grua ViajeraDocumento12 páginasGrua ViajeraSantiago Hernadez RodriguezAún no hay calificaciones
- Pendulo InvertidoDocumento3 páginasPendulo InvertidoHasber MalpicaAún no hay calificaciones
- Control y Automatizacion de Sistemas NeumaticosDocumento7 páginasControl y Automatizacion de Sistemas NeumaticosEfrain CastilloAún no hay calificaciones
- Cinematica RobotsDocumento3 páginasCinematica RobotsAbraham ManzoAún no hay calificaciones
- Ac Mecatronica Espe 033896Documento10 páginasAc Mecatronica Espe 033896Jesus Ayala AlvarezAún no hay calificaciones
- Modelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Documento6 páginasModelado y Control de Un Propulsor para Robot Submarino Tele-Operado (ROV)Cristhian CasarrubiasAún no hay calificaciones
- Implementación y control de un péndulo invertido de dos grados de libertadDocumento6 páginasImplementación y control de un péndulo invertido de dos grados de libertadISmael MEdina LOpezAún no hay calificaciones
- Anteproyecto Bi HeliceDocumento4 páginasAnteproyecto Bi HeliceEDWIN FABIAN NINO TORRESAún no hay calificaciones
- Proyect Final Ing Electronica Mesa Xy CNCDocumento39 páginasProyect Final Ing Electronica Mesa Xy CNCFranciscobagoroshAún no hay calificaciones
- Artículo Científico Tesis Estación Robótica CartesianaDocumento6 páginasArtículo Científico Tesis Estación Robótica CartesianaChristian SalgadoAún no hay calificaciones
- ProyectopelicanoDocumento2 páginasProyectopelicanoFrancisco PochatAún no hay calificaciones
- ControlarticuloDocumento5 páginasControlarticulocrissAún no hay calificaciones
- Brazo RoboticoDocumento5 páginasBrazo RoboticoKin Peter FuchsAún no hay calificaciones
- Control de Distancia INFORMEDocumento34 páginasControl de Distancia INFORMEMarcelo QuispeAún no hay calificaciones
- Proyecto Integrador - 2Documento16 páginasProyecto Integrador - 2Andres ArchilaAún no hay calificaciones
- 11 - ServomotoresDocumento4 páginas11 - ServomotoresNAHUEL AGUSTÍN OCHOAAún no hay calificaciones
- IMT375 Articulo Cientifico GBlanco PDFDocumento6 páginasIMT375 Articulo Cientifico GBlanco PDFjesusAún no hay calificaciones
- Proyecto Etn-640Documento22 páginasProyecto Etn-640MILTON CABRERAAún no hay calificaciones
- Cybanol, Revisión Finalizada Artículo LevitadorDocumento8 páginasCybanol, Revisión Finalizada Artículo LevitadorIvan Alejandro Alba RojasAún no hay calificaciones
- Proyecto GiroscopioDocumento6 páginasProyecto GiroscopioMario RamirezAún no hay calificaciones
- Ball&Beam KDocumento12 páginasBall&Beam KAdolfo GonzálezAún no hay calificaciones
- Iel06. Sistema Robotico Movil EsfericoDocumento8 páginasIel06. Sistema Robotico Movil EsfericoJuan AraujoAún no hay calificaciones
- Garcia, Gerardo Guerra Paper andDocumento52 páginasGarcia, Gerardo Guerra Paper andStewart López MelendezAún no hay calificaciones
- Informe AscensorDocumento6 páginasInforme Ascensoroscar yimy rengifo cardenasAún no hay calificaciones
- PRO_RM_2023_017_20230609Documento3 páginasPRO_RM_2023_017_20230609patricio cepedaAún no hay calificaciones
- PRO_RM_2023_018_20230612 (1)Documento3 páginasPRO_RM_2023_018_20230612 (1)patricio cepedaAún no hay calificaciones
- CATALOGO RGBDocumento5 páginasCATALOGO RGBpatricio cepedaAún no hay calificaciones
- DIMENSIONES BUSESDocumento1 páginaDIMENSIONES BUSESpatricio cepedaAún no hay calificaciones
- 08 TECHODocumento1 página08 TECHOpatricio cepedaAún no hay calificaciones
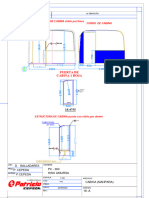
- 18.CABINADocumento1 página18.CABINApatricio cepedaAún no hay calificaciones
- FSDSDDDocumento2 páginasFSDSDDAnderson BravoAún no hay calificaciones
- Cuestionario Gestion de La ProduccionDocumento4 páginasCuestionario Gestion de La ProduccionAnonymous 0Qs8nkeZokAún no hay calificaciones
- RULO - Informe #017-2023-rvp (Informe de EJECUCIÓN de DEMA - C.N Antami)Documento6 páginasRULO - Informe #017-2023-rvp (Informe de EJECUCIÓN de DEMA - C.N Antami)Eloisa Del Aguila VasquezAún no hay calificaciones
- Nodos y PunterosDocumento7 páginasNodos y PunterosAdrian ManjarresAún no hay calificaciones
- Guia Mate 11 Semana 3Documento4 páginasGuia Mate 11 Semana 3Julian ÅdrAún no hay calificaciones
- Examen BDocumento2 páginasExamen BKARINE CASTRO POCCORIAún no hay calificaciones
- Capitulo 1 PDFDocumento48 páginasCapitulo 1 PDFFrancisco Javier Herrera HernandezAún no hay calificaciones
- TALLER Grupal 06 CostosDocumento7 páginasTALLER Grupal 06 CostosJair0% (1)
- P ValueDocumento2 páginasP ValueCamila MirandaAún no hay calificaciones
- Práctica 8-2da. Ley de Newton (Asignación)Documento4 páginasPráctica 8-2da. Ley de Newton (Asignación)Lis MorantesAún no hay calificaciones
- T03. Rivas y Padilla. Aplicaciones C.A. Pdvsa para PavimentaDocumento28 páginasT03. Rivas y Padilla. Aplicaciones C.A. Pdvsa para PavimentaArturo J. AvanciniAún no hay calificaciones
- Plantilla Protocolo Individual Sist Digitales Un1Documento7 páginasPlantilla Protocolo Individual Sist Digitales Un1marcotulio9272Aún no hay calificaciones
- G3 Ejercicios Cap2Documento30 páginasG3 Ejercicios Cap2Darío Sinchi Torres0% (1)
- EjerciciosDocumento11 páginasEjerciciosDiego AVAún no hay calificaciones
- NTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Documento8 páginasNTC 535-1 MAIZ Proyecto Norma Maiz NTC 535-1Jairo100% (1)
- Ejercicios Sobre GravimetríaDocumento2 páginasEjercicios Sobre GravimetríaabelAún no hay calificaciones
- 3Documento1 página3Jordy Alexander Manrique MejiaAún no hay calificaciones
- Chantico Energy, expertos en automatización y compresiónDocumento15 páginasChantico Energy, expertos en automatización y compresiónArturo Treviño MedinaAún no hay calificaciones
- Cálculo de reservas y productividad de petróleo y gas en yacimientos del PerúDocumento45 páginasCálculo de reservas y productividad de petróleo y gas en yacimientos del PerúYeison Bracho100% (1)
- Entradas Salidas Discretas - Control Real EspañolDocumento6 páginasEntradas Salidas Discretas - Control Real EspañolJoss Maykol Mundaca VasquezAún no hay calificaciones
- HV Roberto VillegasDocumento35 páginasHV Roberto VillegasAndreaKaroVasqueleMartinAún no hay calificaciones
- Caudal 2bguDocumento5 páginasCaudal 2bguJavier Jacome BarreraAún no hay calificaciones
- Examen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Documento32 páginasExamen 3 Secundaria Matematica y Comunicacion Solucionario 161016 Downloable 2269333Gabriela Angélica Casas MattaAún no hay calificaciones
- sb1 2016 RM 01Documento25 páginassb1 2016 RM 01Edinsson R. Javier VillanuevaAún no hay calificaciones