También podría gustarte
- Vectores en El EspacioDocumento19 páginasVectores en El EspacioGabriel CabreraAún no hay calificaciones
- Rectas 2da Parte.Documento3 páginasRectas 2da Parte.Ignacio RodriguezAún no hay calificaciones
- Int Linea SupDocumento31 páginasInt Linea SupLlúcia Coll AllèsAún no hay calificaciones
- Resumen de Geometría Analítica-1Documento2 páginasResumen de Geometría Analítica-1Karel LuisAún no hay calificaciones
- Matematicas Resueltos (Soluciones) La Recta Nivel II 1º y 2º BachilleratoDocumento186 páginasMatematicas Resueltos (Soluciones) La Recta Nivel II 1º y 2º Bachilleratomanuel_valle_4Aún no hay calificaciones
- Taller 1Documento5 páginasTaller 1SantiagoRivas100% (1)
- IAM S2línea RectaDocumento26 páginasIAM S2línea RectaDanny YnfanteAún no hay calificaciones
- Ay 3 SOL1Documento8 páginasAy 3 SOL1wiryarc4Aún no hay calificaciones
- 6 Rectas y PlanosDocumento10 páginas6 Rectas y PlanosAyrton GarciaAún no hay calificaciones
- Glosario Mate Mau 4to SemestreDocumento7 páginasGlosario Mate Mau 4to SemestreHanna MarinAún no hay calificaciones
- Ecuaciones paramétricas: representación de curvas mediante parámetrosDocumento21 páginasEcuaciones paramétricas: representación de curvas mediante parámetrosFrench SouraeAún no hay calificaciones
- T5.0 Rectas y PlanosDocumento26 páginasT5.0 Rectas y PlanosTeresa Villena GonzálezAún no hay calificaciones
- Libro Cálculo Multivariable Capítulo IDocumento28 páginasLibro Cálculo Multivariable Capítulo IAnthony Carranza Angulo100% (1)
- S05.s2 La Recta en R3 Paralelaa y PerpendicularesDocumento25 páginasS05.s2 La Recta en R3 Paralelaa y PerpendicularesMelba KaisenAún no hay calificaciones
- 3.1 Introducci OnDocumento13 páginas3.1 Introducci OnLeonardo ABAún no hay calificaciones
- Informatica Level 5Documento11 páginasInformatica Level 5Taller de LorenaAún no hay calificaciones
- Mg. E. Fern Andez - Mg. M. GanimDocumento4 páginasMg. E. Fern Andez - Mg. M. GanimValentinaAún no hay calificaciones
- Ecuaciones de La RectaDocumento2 páginasEcuaciones de La RectaAlberto GonzalezAún no hay calificaciones
- Ayudantia1 - Cáculo IIIDocumento3 páginasAyudantia1 - Cáculo IIIMATÍAS LABBÉAún no hay calificaciones
- Fo Rmulas+y+pra CticoDocumento2 páginasFo Rmulas+y+pra CticoCarla RodriguezAún no hay calificaciones
- Curvas PlanasDocumento11 páginasCurvas PlanasRamirez Olvera Christian EduardoAún no hay calificaciones
- Ecuaciones RectaDocumento12 páginasEcuaciones RectaRaúl Raúl0% (1)
- Parametrizacion de CurvasDocumento31 páginasParametrizacion de CurvasOscar U.RAún no hay calificaciones
- TRIDIMENSIONALDocumento28 páginasTRIDIMENSIONALJBCristopherAún no hay calificaciones
- Rectas y planos en R3: ecuaciones y propiedades geométricasDocumento15 páginasRectas y planos en R3: ecuaciones y propiedades geométricasIsaac Esteban Solano Guzmán57% (7)
- Geometrc3ada Analc3adticaDocumento9 páginasGeometrc3ada Analc3adticaFran Grueso CerezoAún no hay calificaciones
- Curvas paramétricas y longitud de arcoDocumento19 páginasCurvas paramétricas y longitud de arcoedisonAún no hay calificaciones
- 06 Recta Geometria AnaliticaDocumento6 páginas06 Recta Geometria AnaliticazzAndreszzAún no hay calificaciones
- Taller 1 CVectorialDocumento6 páginasTaller 1 CVectorialcamiloAún no hay calificaciones
- Espacio Vectorial Tridimensional y Lineas RectasDocumento9 páginasEspacio Vectorial Tridimensional y Lineas RectasJBCristopherAún no hay calificaciones
- S1 T2 VECTORES InsDocumento37 páginasS1 T2 VECTORES InsLuis SilvaAún no hay calificaciones
- Semana 1 - La RectaDocumento23 páginasSemana 1 - La RectaJeraldine SullonAún no hay calificaciones
- 5) Integrales de Línea PDFDocumento63 páginas5) Integrales de Línea PDFmarceloAún no hay calificaciones
- Relación de Ejercicios 1Documento3 páginasRelación de Ejercicios 1MiguiAún no hay calificaciones
- Funcion CuadraticaDocumento22 páginasFuncion CuadraticaDemsshill CoutinoAún no hay calificaciones
- C51 CurvasParametricas PDFDocumento3 páginasC51 CurvasParametricas PDFDavid Lanas PèrezAún no hay calificaciones
- Pr1 CVE 20 II Reprog AnswersDocumento8 páginasPr1 CVE 20 II Reprog AnswersFiorela ArellanoAún no hay calificaciones
- Ecuaciones de La Recta e IncidenciaDocumento6 páginasEcuaciones de La Recta e Incidenciaeva mariaAún no hay calificaciones
- Ecuaciones ParamétricasDocumento6 páginasEcuaciones ParamétricasJuan HernanAún no hay calificaciones
- Word de Recta 3dDocumento7 páginasWord de Recta 3dAnd6Aún no hay calificaciones
- Semana - 02 - Geometria Analitica-Linea RectaDocumento12 páginasSemana - 02 - Geometria Analitica-Linea RectaAnonymous yyzkUNAún no hay calificaciones
- Control 2 - Introducción Al Cálculo (2008)Documento3 páginasControl 2 - Introducción Al Cálculo (2008)Diego Herrera MancillaAún no hay calificaciones
- Ecuación de La Recta: TrigonometríaDocumento3 páginasEcuación de La Recta: TrigonometríaFrancisAún no hay calificaciones
- PLANOSDocumento5 páginasPLANOSDainer Rojas MendozaAún no hay calificaciones
- Matematicas Resueltos (Soluciones) La Recta en El Plano Nivel I 1º BachilleratoDocumento36 páginasMatematicas Resueltos (Soluciones) La Recta en El Plano Nivel I 1º Bachilleratomanuel_valle_4100% (1)
- CALV Guia1Documento6 páginasCALV Guia1Juan RinconAún no hay calificaciones
- Repaso Geometría Analítica 1Documento5 páginasRepaso Geometría Analítica 1gustavoAún no hay calificaciones
- Teoria RectasDocumento4 páginasTeoria RectasIsmael RuizAún no hay calificaciones
- 1.1 Ecuaciones ParamétricasDocumento10 páginas1.1 Ecuaciones ParamétricasStalin Paul Rodriguez Leon100% (1)
- Matematica Dopazo Resumen PDFDocumento38 páginasMatematica Dopazo Resumen PDFpruebanAún no hay calificaciones
- Cinematica en Dos y Tres DimensionesDocumento29 páginasCinematica en Dos y Tres DimensionesLuis RomeroAún no hay calificaciones
- Interseccion Entre GraficasDocumento14 páginasInterseccion Entre GraficasAmanda GonzálezAún no hay calificaciones
- Guía N°1 - Transformaciones Lineales (Utfsm)Documento4 páginasGuía N°1 - Transformaciones Lineales (Utfsm)Jose Gonzalez SapbeeAún no hay calificaciones
- AlgLineal Unidad 8Documento46 páginasAlgLineal Unidad 8Jhan Jauregui RamirezAún no hay calificaciones
- Ecuaciones de rectas en RnDocumento13 páginasEcuaciones de rectas en RnLeønAún no hay calificaciones
- Clase 27-08 - Rectas y Planos en El Espacio - Patricia ReynosoDocumento20 páginasClase 27-08 - Rectas y Planos en El Espacio - Patricia ReynosoEliane Lopez AtenciaAún no hay calificaciones
- Ecuacion de La RectaDocumento5 páginasEcuacion de La Rectamaylen valentina garcia santiagoAún no hay calificaciones
- Ajuste LinealDocumento1 páginaAjuste Lineallav2182Aún no hay calificaciones
- Ayudantía 12Documento1 páginaAyudantía 12Lucero MoragaAún no hay calificaciones
- Ayudantía 10Documento1 páginaAyudantía 10Lucero MoragaAún no hay calificaciones
- Ayudantía 8Documento1 páginaAyudantía 8Lucero MoragaAún no hay calificaciones
- Ayudantía 7Documento1 páginaAyudantía 7Lucero MoragaAún no hay calificaciones
- Ayudantia 6Documento4 páginasAyudantia 6Lucero MoragaAún no hay calificaciones
- Ayudantía 2Documento1 páginaAyudantía 2Lucero MoragaAún no hay calificaciones
- Ayudantía 3Documento1 páginaAyudantía 3Lucero MoragaAún no hay calificaciones
- Ayudantía 3 Programación AvanzadaDocumento3 páginasAyudantía 3 Programación AvanzadaLucero MoragaAún no hay calificaciones
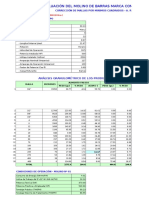
- Balance MoliendaDocumento69 páginasBalance MoliendaSintia Yuli Ponce AguirreAún no hay calificaciones
- UNIDAD 4 Instalaciones ElectricasDocumento10 páginasUNIDAD 4 Instalaciones ElectricasMelani PeraltaAún no hay calificaciones
- Ud.u7. Pilotes Hincados4Documento14 páginasUd.u7. Pilotes Hincados4Roberto MonettaAún no hay calificaciones
- Informe de Tratamiento de MineralesDocumento12 páginasInforme de Tratamiento de MineralesPol Gaspar Huillca MallquiAún no hay calificaciones
- Teoria General de Sistemas La BicicletaDocumento6 páginasTeoria General de Sistemas La BicicletaFernando PalominoAún no hay calificaciones
- Distribución NormalDocumento7 páginasDistribución Normalsinuhe leobardo felix arteagaAún no hay calificaciones
- Ejercicios Prepa 1Documento5 páginasEjercicios Prepa 1Javier GuerreroAún no hay calificaciones
- Andrango Simbaña Torres G1 Informe1.2Documento3 páginasAndrango Simbaña Torres G1 Informe1.2Ed AndrewAún no hay calificaciones
- S01.s2 MaterialDocumento45 páginasS01.s2 MaterialRocio Maribel Nuñez OteroAún no hay calificaciones
- Informe No 1Documento6 páginasInforme No 1lizette MillaresAún no hay calificaciones
- Tubos GruesosDocumento33 páginasTubos GruesosPatricia Vallone100% (1)
- Practica 1 Mec - 3263 A (Ii-21)Documento3 páginasPractica 1 Mec - 3263 A (Ii-21)Alvaro Duenas CossioAún no hay calificaciones
- Sistema MulticompuestosDocumento104 páginasSistema Multicompuestosfernando llajamangoAún no hay calificaciones
- Propiedades de Los FluidosDocumento2 páginasPropiedades de Los FluidosJOSE ENRIQUE ANGUIANO HERRERAAún no hay calificaciones
- Cuestionario de Dinamica EstructuralDocumento4 páginasCuestionario de Dinamica Estructuraljuan quispeAún no hay calificaciones
- 01 Intro Electrónica MédicaDocumento43 páginas01 Intro Electrónica MédicaeespartacoAún no hay calificaciones
- La libertad de un caballo salvajeDocumento10 páginasLa libertad de un caballo salvajeBelenRea18100% (1)
- Calibracion de PresionesDocumento10 páginasCalibracion de PresionesRishark Yunior Boy LayAún no hay calificaciones
- Laboratorio de Mediciones Eléctricas RespuestasDocumento3 páginasLaboratorio de Mediciones Eléctricas RespuestasWillber De LunaAún no hay calificaciones
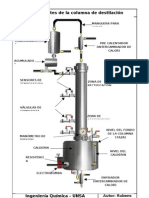
- Esquema de Una Columna de Destilación Fraccionada - UNSADocumento4 páginasEsquema de Una Columna de Destilación Fraccionada - UNSAlervipa0% (1)
- Primer Parcial Termodinámica - Revisión Del Intento 2023Documento4 páginasPrimer Parcial Termodinámica - Revisión Del Intento 2023Alexander Antonio PegueroAún no hay calificaciones
- Foro 1 MecanicaDocumento4 páginasForo 1 MecanicaLuis AlonsoAún no hay calificaciones
- CARRIER 50ucup (V) Psd-Es 14012020Documento54 páginasCARRIER 50ucup (V) Psd-Es 14012020Christian MonterrosoAún no hay calificaciones
- INFORME CAJA DE VELOCIDADES FinalDocumento4 páginasINFORME CAJA DE VELOCIDADES FinalJuanse MoraAún no hay calificaciones
- Lab N°3 Energía Específica en Canales AbiertosDocumento6 páginasLab N°3 Energía Específica en Canales AbiertosKevin Quillash GuerreroAún no hay calificaciones
- 1 Teoría Del ErrorDocumento17 páginas1 Teoría Del ErrorAlckret AlckretAún no hay calificaciones
- Resumen TeodolitoDocumento5 páginasResumen TeodolitoNicolás EsquivelAún no hay calificaciones
- Introducción al muestreo estadístico y sus conceptos claveDocumento50 páginasIntroducción al muestreo estadístico y sus conceptos claveyulexypiscoAún no hay calificaciones
- Ensayo de AsentamientoDocumento5 páginasEnsayo de AsentamientoKevin ChavezAún no hay calificaciones