TEMA-6-ESTEREOPSIS.
Boroboja
Fundamentos de Visión Binocular
4º Grado en Óptica y Optometría
Facultad de Ciencias
Universidad de Granada
Reservados todos los derechos.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
FUNDAMENTOS DE LA VISIÓN BINOCULAR
TEMA 6: ESTEREOPSIS
1. INTRODUCCIÓN
Por estereopsis se entiende aquella cualidad de nuestro sistema visual que nos permite
determinar con una alta precisión la estructura tridimensional del entorno que nos rodea,
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
proporcionando además una sensación muy “vivida” de la profundidad. El estímulo que
desencadena el fenómeno de la estereopsis es la disparidad
Reservados todos los derechos.
Usualmente, las fuentes a partir de las cuales un observador obtiene información tridimensional
de una escena exterior son: los rasgos monoculares, la convergencia y la acomodación y la
disparidad. Todas estas fuentes se pueden encontrar simultáneamente en una escena y, por
tanto, si queremos estudiar el fenómeno de la estereopsis tendremos que trabajar con tests o
experiencias en las que la única información presente sea la disparidad. Uno de estos tests son
los estereogramas de puntos aleatorios. Estos estereogramas constituyen la fuente de estudio
más importante del fenómeno de la estereopsis y nos dedicaremos a ellos en los siguientes
puntos del tema.
Sabemos que la disparidad es el estímulo desencadenante de la estereopsis y que aporta esa
fuerte sensación de tridimensionalidad. Veamos ahora porqué la disparidad puede determinar la
distancia relativa entre objetos, cuestión que, como sabemos, no es posible a través de la
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
información que proporcionan los rasgos monoculares y la información binocular de la
convergencia y acomodación. Veámoslo gráficamente.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
La disparidad binocular η=α-α’ viene dada por:
Y, por tanto, . Es decir, vemos cómo la disparidad sirve a nuestro sistema visual
para poder evaluar distancias relativas de manera precisa, aunque no lo hace exactamente ya
que hay que tener conocimiento de la situación de los objetos (conocimiento de d), aunque esa
información la adquiere el sistema visual a través del aprendizaje.
Reservados todos los derechos.
En esta pregunta hemos hablado sobre la disparidad horizontal originada por la separación
horizontal entre los dos ojos. Durante mucho tiempo se ha especulado sobre la posibilidad de
que la disparidad vertical tuviera algún rol en la percepción en profundidad. Aunque debido a la
disposición a la misma altura de los ojos, la disparidad vertical, de existir, es muy pequeña y
poco relevante.
2. GENERACIÓN DE ESTEREOGRAMAS
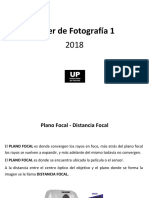
El fundamento de los estereogramas es proyectar imágenes a cada
retina que correspondan con situaciones espaciales reales.
Constituye el tipo de test de estereopsis que se conoce como test de
proyección. Este fundamento se puede deducir a partir de la figura.
En ella, encontramos una sección transversal de tres varillas (puntos
según el dibujo) representadas por D, F y P, y dispuestas
espacialmente en lugares distintos. La imagen de dicha situación
espacial sería recibida por los ojos izquierdo y derecho (el y er) y
proyectada en ambas retinas. Imaginemos que registramos la escena
en un plano (d-d’ en la figura) delante de nuestros ojos. La proyección
proporcionaría la imagen que registran los cuadrados L y R de la
figura. En ella vemos tres varillas en cada cuadrado situadas en el
plano de maneras diferentes, debido a que las tres varillas están
situadas espacialmente en lugares distintos.
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
Si a un observador le presentamos las imágenes que contiene el plano d-d’ en vez de las tres
varillas, la percepción sería exactamente la misma. El observador seguiría viendo las varillas D,
F y P colocadas en la región original.
La siguiente figura muestra otro estereograma y su
situación espacial. En este estereograma, vemos cómo una
sola línea se puede corresponder con dos en la otra imagen
y corresponder a una situación real. Este ejemplo, aunque
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
sencillo, demuestra que la generación de estereogramas
puede ser muy compleja.
3. ESTEREOGRAMAS DE PUNTOS ALEATORIOS (RDS)
Si nos fijamos en la parte superior de la figura, vemos un estereograma constituido por dos
imágenes. Estas dos imágenes son la proyección en ambas retinas del “objeto tridimensional”
que se observa en la figura intermedia. Como vemos, observamos un pequeño cuadrado
constituido por puntos negros y blancos que sobresale (si fusionamos en paralelo; se vería
hacia dentro con fusión cruzada) sobre un cuadrado también constituido por puntos negros y
Reservados todos los derechos.
blancos.
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
Obviamente, si miramos una de las dos partes del estereograma es imposible distinguir la
estructura tridimensional del objeto y por tanto, no hay información monocular reconocible de
forma. ¿De dónde viene la estructura tridimensional del objeto?. La respuesta es sencilla, de la
disparidad y, ¿dónde se encuentra la información de la disparidad?. La solución la encontramos
si observamos la nube de puntos blancos y negros, señalados como 1 y 0, en la parte inferior de
la figura anterior. Si nos concentramos en la imagen izquierda, los puntos están al azar, sin
orden alguno. Si miramos la otra imagen vemos que la disposición de puntos es idéntica salvo
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
un cuadrado en el centro que se encuentra desplazado en la otra imagen (señalado con las
letras A y B). Las letras X e Y denotan también puntos blancos y negros situados al azar. Ese
“desplazamiento” corresponde al pequeño cuadrado tridimensional. Dependiendo del sentido del
desplazamiento del pequeño cuadrado en el estereograma, el pequeño cuadrado se ve por
delante o por detrás.
A mayor sensación de profundidad (el cuadrado se percibe más lejano del central grande),
mayor desplazamiento en las proyecciones retinianas. Si aumentamos progresivamente la
disparidad (desplazamiento del cuadrado en la imagen), existe un valor de la disparidad para el
que se deja de percibir estereoscópicamente el cuadrado. Dicho valor se llama rango de
Reservados todos los derechos.
disparidad o disparidad máxima. El valor mínimo de desplazamiento que genera la percepción
de profundidad es una medida de agudeza estereoscópica. El valor de la disparidad máxima
es importante desde muchos puntos de vista ya que se puede utilizar para cuantificar ciertas
influencias de determinados parámetros en la visión estereoscópica. Incluso tiene ciertas
aplicaciones desde el punto de vista práctica, ya que permite cierta evaluación de la calidad de
la visión.
La disparidad mínima es el valor mínimo de disparidad a partir del cual podemos ver
estereoscópicamente y la disparidad máxima da una medida del tamaño máximo de la región
espacial en la que vemos estereoscópicamente. Una propiedad especial de los RDS es que no
se experimenta diplopia. En el momento en que la disparidad es muy grande (mayor que la
disparidad máxima), se funden los dos partes del estereograma pero no se ve en profundidad.
Finalmente, hay que señalar que se conoce como estereopsis local a la estereopsis generada
por tests en los que aparece información monocular reconocible, como objetos, contornos,
líneas… y se realiza una correspondencia estéreo más local. Cuando no se observa en los tests
información monocular reconocible, como los RDS, la estereopsis se conoce como estereopsis
global ya que la correspondencia estéreo se realiza también de una manera más global, no a
escala local, al no existir información monocular reconocible. Como normal general, se necesita
más tiempo para percibir tests con estereopsis global aunque el aprendizaje reduce el tiempo
necesario para su percepción. Hay personas que no perciben RDS y, sí en cambio la estereopsis
local.
4. ASPECTOS ESPECIALES DE LOS RDS
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
Los RDS muestran algunas características especiales que mostramos a continuación:
• Tolerancia a las diferencias de tamaño: se pueden tolerar (fundir) diferencias de
tamaño entre las dos imágenes que forman el estereograma de un 15%, notablemente
superior a los valores normales de aniseiconia en imágenes normales en las que se
tolera como máximo un 5%
Reservados todos los derechos.
• Tolerancia al desenfoque: si una de las dos partes del estereograma se desenfoca, el
observador es capaz de fundir las dos mitades y percibir nítidamente el estereograma,
siempre que el desenfoque, claro está, no sea muy acentuado.
• El sistema visual procesa contrastes de luminancia, no valores absolutos: se
pueden fundir dos mitades de un estereograma con puntos blancos de diferentes
luminancias en cada mitad
• La disparidad se procesa a diferentes frecuencias espaciales: fundiéndose
estereogramas de puntos aleatorios a unas frecuencias, entrando en rivalidad otras.
Esto lleva a la siguiente conclusión: la estereopsis es un fenómeno que se origina a
diferentes escalas espaciales.
• El estímulo que genera un estereograma es el cambio de luminancia entre los
puntos blancos y negros: el sistema visual procesa de manera diferente ciertos
aspectos visuales como son la cromaticidad y la estereopsis. (No hay que confundir
este fenómeno con el de cromoestereopsis. La cromoestereopsis tiene su origen en la
aberración cromática longitudinal que hace que objetos azules se vean más lejanos que
objetos rojos colocados a la misma distancia)
• Cierta información monocular como la textura, se puede perder cuando se
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
procesa la información binocular: en ella vemos cómo las mitades monoculares dan
sensación de textura que es perdida cuando se funde. Este ejemplo muestra que el
procesamiento de la disparidad es más importante que cierta información monocular,
como la textura.
Reservados todos los derechos.
5. MODELO FISIOLÓGICO DE LIVINGSTONE Y HUBEL (1988)
EXAMEN Sabemos que las señales eléctricas provenientes de las células fotorreceptoras se
procesan en una segunda capa de neuronas y, a continuación, se transmiten a un estrato
inferior de la retina constituido por las células ganglionares.
Contiene dos tipos de células que difieren por su tamaño (grandes y pequeñas) y por el modo de
procesar la información recibida de los conos: las células grandes no distinguen entre las
señales provenientes de los diversos tipos de conos, sino que simplemente suman la
información que reciben de los tres tipos, carecen de selectividad cromática y se puede pensar
que son ciegas al color. Las células ganglionares pequeñas sí distinguen las señales
provenientes de los conos y se pueden considerar capacitadas para dar información cromática,
aunque modifican la señal de color que reciben y son más selectivas a la hora de la transmisión.
El conjunto de células pequeñas (sistema parvocelular) del cuerpo geniculado lateral recibe
señales de las células ganglionares pequeñas, mientras que la región de células grandes
(sistema magnocelular) recibe la información de las células ganglionares grandes. Estos dos
sistemas se diferencian por su sensibilidad al color (más sensible el parvosistema,
prácticamente nula la sensibilidad al color del magnosistema), a los contrastes luminosos
(más sensible el magnosistema), su resolución temporal (más rápido el magnosistema, casi
insensible al movimiento el sistema parvocelular) y su diferencias en la agudeza (más sensible
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
el parvosistema, poco sensible el magnosistema). En lo que concierne a la estereopsis, es el
magnosistema el encargado de procesar dicha información. Estas diferencias implicarán a su
vez notables diferencias a la hora del procesamiento de la información visual consideradas en
el contexto de los niveles superiores del sistema visual.
Desde los cuerpos geniculados laterales pasan las señales a la V1. La vía que siguen los
impulsos eléctricos puede seguirse hasta el estrato medio del área V1, donde tiene lugar la
separación de la información visual. Las señales procedentes del magnosistema se encauzan
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
hasta la mitad superior de este estrato y, las procedentes del parvosistema hasta la mitad
inferior.
6. AGUDEZA ESTEREOSCÓPICA
Se define como umbral de discriminación en profundidad, como la mínima distancia en
profundidad, Δd, que un observador es capaz de resolver. Se entiende por agudeza visual
estereoscópica (AVE) o umbral de estereopsis o disparidad umbral (η), la disparidad
mínima que puede percibir un observador. Usualmente se expresa en minutos de arco, aunque
en la fórmula siguiente el dato sale en radianes. La determinación de este parámetro es muy
Reservados todos los derechos.
importante desde el punto de vista clínico, ya que es muy utilizado para evaluar y hacer un
seguimiento de la estereopsis.
La relación entre umbral de discriminación en profundidad y AVE es:
La expresión anterior para η da el resultado en radianes; para obtener el valor de la disparidad
umbral en minutos de arco hay que multiplicar dicho valor por 3437.747.
6.1. FACTORES QUE INFLUYEN EN LA AGUDEZA ESTEREOSCÓPICA
• Tamaño angular: un aumento del área no tiene porqué llevar a un aumento en el
umbral de estereopsis una vez estimulada un mínimo de área espacial
• Luminancia de fondo: el umbral de estereopsis es mucho menos sensible a nivel
escotópico y muestra un incremento en la sensibilidad a partir de la detección de los
conos hasta un nivel de 10 trolands. A partir de dicho valor se produce la estabilización
del umbral de estereopsis.
• Duración: el umbral de estereopsis cambia como función del tiempo de presentación
del estímulo en un rango de exposición de 7.5 ms hasta 1000 ms. La agudeza
estereoscópica depende de los movimientos oculares, es una cuestión dinámica
• Excentricidad: hacia periferia existe un previsible empeoramiento del umbral de
disparidad, ya que se va reduciendo la capacidad de resolución espacial de nuestro
sistema visual.
• Distancia límite: EXAMEN distancia a partir del cual no discriminamos por estereopsis.
Si tenemos un valor mínimo de agudeza estereoscópica, implica que hay una distancia a
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
2𝑎
partir de la cual no distingo estereoscópicamente. Esta distancia límite es igual a η
donde η es la diapridad umbral y 2ª es la distancia interpupilar. Si se aplica el cálculo
de la distancia límite cuando la disparidad umbral se obtiene con alta precisión, bajo
controladas condiciones de observación, se puede llegar a obtener un valor para la
distancia límite del orden del kilómetro. Debemos expresarlo en radianes
7. EL PROBLEMA DE LA CORRESPONDENCIA ESTEREOSCÓPICA
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
EXAMEN + DE 2 PREGUNTAS En este punto hablaremos sobre cómo calcula la disparidad el SVH a
partir de las imágenes que se reciben en ambas retinas.
Calcular la disparidad equivale a determinar para cada punto de la imagen, cual es el
correspondiente en la otra con el que va a fusionar y proporcionar una imagen simple y
unificada. Es el problema de la correspondencia estereoscópica. Veremos, a través de
varias figuras el planteamiento y una solución a dicho problema.
Reservados todos los derechos.
En la figura tenemos las secciones transversales de dos varillas, puntos A y B, situadas en el
espacio en posiciones diferentes. La imagen de dichas varillas produce dos líneas en cada
retina, que es la información que va a procesar nuestro cerebro. Las imágenes de A se
formarán en la fóvea de cada retina y las de B fuera de la fóvea pero dentro de las áreas de
Panum. Es decir, bL se formará dentro del área de Panum correspondiente a b R. En esta
situación decimos que el punto o línea aL se corresponde con aR y bR con bL.
Ahora bien, si tenemos en cuenta que nuestro sistema visual sólo procesa la información a
partir de las imágenes en ambas retinas, la situación descrita en el párrafo anterior no tiene
por qué ser cierta. Veámoslo, hemos indicado que el punto b L se corresponde con bR, pero
también se podría corresponder con aR y aL con bR. ¿Cómo sería la situación espacial en ese
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
caso?. La situación sería la de dos varillas situadas en los puntos G1 y G2 que corresponden a
los puntos de corte de las líneas de mirada de aL - bR y aR - bL, respectivamente.
En definitiva, dos situaciones espaciales distintas producen las mismas proyecciones en la
retina y, por tanto, la pregunta surge de manera natural: ¿cómo sabe nuestro sistema visual
que la situación real es la de A y B y no la de G1 y G2?. Es el problema de la correspondencia
estereoscópica. Esta situación es todavía más compleja conforme las imágenes lo son, veamos
la siguiente figura:
Reservados todos los derechos.
En esta figura hay cuatro puntos (varillas) negros alineados que producen dos imágenes en la
retina, Ii y Di. En cada retina se tendría la representación de cuatro puntos. Pero, como en el
caso anterior, los cuatros puntos negros no son la única disposición espacial de puntos que
produce la mismas imágenes en ambas retinas. Así, por ejemplo los cuatro puntos blancos
alineados verticalmente producirían la misma proyección. En total, habría 24 casos posibles.
Surge la misma pregunta que con la figura anterior, ¿cómo sabe nuestro sistema visual la
situación espacial real?. En este caso es más complejo, porque hay 24 emparejamientos
posibles. En una imagen real, con miles de puntos, serían incluso millones de emparejamientos.
¿Cómo es capaz nuestro sistema visual de quedarse con un único emparejamiento (disposición
espacial) en tiempo real?.
La respuesta la van a proporcionar los campos receptivos. Lo primero que hace nuestro
sistema visual es utilizar una imagen con menos puntos donde sea sencillo calcular la
correspondencia estéreo. Para ello, obtiene la información a partir de la imagen que
proporciona el campo receptivo con menor frecuencia espacial (d). A partir de esa imagen,
deduce la primera representación espacial de la escena visual y la va refinando,
progresivamente, utilizando la información que envían los campos receptivos de mayor
frecuencia espacial (c y b). Éste, básicamente, es el mecanismo que realiza nuestro sistema
visual, en consonancia, con todas las características que sobre la estereopsis, hemos estudiado
en las preguntas anteriores.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
Reservados todos los derechos.
Como punto final a esta pregunta, indicar que la “elección” de la disposición espacial correcta
determina los valores de disparidad que serán procesados por nuestro sistema visual. Si la
disposición espacial correspondiente hubiese sido otra los valores de disparidad también
habrían sido diferentes.
8. DISPOSITIVOS DE VISIÓN 3D
En esta pregunta vamos a hacer un repaso sencillo de algunos dispositivos 3D utilizados en la
práctica clínica. Hay que tener en cuenta que la tecnología cambia rápidamente y nuevos tipos
de dispositivos 3D se incorporan al mercado constantemente.
La estereopsis usualmente es estudiada en dispositivos que presentan un par-estéreo y el
observador recibe una imagen en cada ojo de manera independiente. Las figuras que se
presentan al observador se le suelen llamar estereogramas y los dispositivos utilizados
estereoscopios.
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
• Estereoscopio de espejos de Wheatstone: se utilizan dos espejos para separar las
imágenes. Un dispositivo utilizado con frecuencia en la práctica clínica y parecido en el
fundamento al estereoscopio de Wheatstone es el sinoptóforo.
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
• Estereoscopio de Brewster: utiliza lentes para colocar el punto lejano a una distancia
de trabajo de 20 centímetros. Separando la distancia y posición de las lentes se inducen
Reservados todos los derechos.
efectos prismáticos que pueden variar la convergencia. Este dispositivo se ha utilizado
mucho para la estereofotografía.
• Anaglifos: las dos mitades se imprimen en rojo para
un ojo o verde (azul) para otro. El observador llevar
filtros rojo/verde(azul) de tal manera que el ojo con el
filtro rojo ve solo la imagen en verde y a la inversa. Son
muy utilizados, aunque la calidad de las imágenes no
es muy buena y el contenido natural de color de las
imágenes no se puede reproducir fielmente. En los
últimos años la tecnología de diseño de los filtros ha
avanzado mucho y se diseñan gafas con varios filtros
de color de estrecho ancho de banda en cada ojo que permiten tener una imagen de
color completa.
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
• Vectogramas: son dispositivos que separan las dos
imágenes por filtros polarizados. Se pude utilizar la
polarización lineal para separar las imágenes o
polarización circular. La lineal ofrece la desventaja de
que movimientos de la cabeza viendo la película o imagen
hacen perder el efecto 3D mientras que el uso de la
polarización circular es más tolerante a los movimientos
No se permite la explotación económica ni la transformación de esta obra. Queda permitida la impresión en su totalidad.
del observador, siendo por ello más utilizada, aunque
reduce más la intensidad de luz de la pantalla.
• Dispositivos de cristal líquido con separación temporal: las imágenes izquierda y
derecha son transmitidas desde la pantalla alternativamente en el tiempo. Las gafas
ocluyen alternativamente y cada ojo ve, también alternativamente, la imagen no ocluida.
Si la frecuencia de alternancia es alta la percepción es la de una imagen fusionada en
3D a partir de la disparidad generada en las imágenes alternantes. Este tipo de
dispositivos es muy utilizado en la industria de simulaciones, videojuegos y televisión.
Reservados todos los derechos.
• Dispositivos autoestereoscópicos: el observador no utiliza ningún dispositivo especial
para fusionar las imágenes sino que modificando la convergencia-acomodación el
sujeto separa y fusiona las dos imágenes o el propio dispositivo ayuda a separar las
imágenes con rendijas (se les suele llamar “barreras de paralaje”) o pequeñas lentes
frontales (pantallas lenticulares), como utilizan algunos dispositivos para juegos como
la Nintendo 3D.
Becas Santander Erasmus: Inscríbete en becas-santander.com hasta el 15/03/2021.
También podría gustarte
- Test y Manual de Aplicación DiscDocumento26 páginasTest y Manual de Aplicación DiscJota Ce62% (45)
- E-Book - The Art of Arch Viz - Spanish PDFDocumento23 páginasE-Book - The Art of Arch Viz - Spanish PDFPilar Sofia Viloria AhumadaAún no hay calificaciones
- Profundidad e Ilusión PlásticaDocumento11 páginasProfundidad e Ilusión PlásticaLaura MercatanteAún no hay calificaciones
- Acordes para TecladoDocumento9 páginasAcordes para Tecladoannia_diaz84% (38)
- 03-h5 Informe de La Evaluacion Visual y AuditivaDocumento3 páginas03-h5 Informe de La Evaluacion Visual y Auditivawilly huallpa carvajalAún no hay calificaciones
- Kahoot Discapacidad Sensorial y VisualDocumento2 páginasKahoot Discapacidad Sensorial y VisualesbidiAún no hay calificaciones
- La EstereosDocumento13 páginasLa Estereosyeimi paternina100% (1)
- La EstereosDocumento13 páginasLa EstereosElmer Castro CanahuireAún no hay calificaciones
- La geometría de la representación visual: de la visión ciclópea a la estereoscópicaDocumento7 páginasLa geometría de la representación visual: de la visión ciclópea a la estereoscópicaLuis Inti MendozaAún no hay calificaciones
- Apunts PercepcióDocumento9 páginasApunts PercepciómariaAún no hay calificaciones
- Practica N°5 Dilan TuquerrezDocumento4 páginasPractica N°5 Dilan TuquerrezDylanTuquerrezAún no hay calificaciones
- Determinación distancia interpupilar base instrumentalDocumento12 páginasDeterminación distancia interpupilar base instrumentalwilne rojasAún no hay calificaciones
- UNIDAD III Problemas de PersonalidadDocumento8 páginasUNIDAD III Problemas de PersonalidadBriana fernanda Moctezuma rivasAún no hay calificaciones
- TBL DOSIFDocumento9 páginasTBL DOSIFleonarditopoe binbinpinAún no hay calificaciones
- EstereoscopíaDocumento18 páginasEstereoscopíadaniel lopezAún no hay calificaciones
- Fotoint 2008Documento258 páginasFotoint 2008IsabelAún no hay calificaciones
- Foto - Trabajo 01Documento6 páginasFoto - Trabajo 01Skapa SacAún no hay calificaciones
- Informe Estereos PDFDocumento13 páginasInforme Estereos PDFJairo Daniel SarmientoAún no hay calificaciones
- EstereogramaDocumento47 páginasEstereogramaJUAN AGUILAR100% (2)
- Estereogramas 3DDocumento126 páginasEstereogramas 3DMaestro Sri Deva Fénix100% (5)
- EstereosDocumento4 páginasEstereosAndrés RuizAún no hay calificaciones
- Foto Informe 1Documento9 páginasFoto Informe 1Christian Omar MarroquinAún no hay calificaciones
- Paralaje ExpoDocumento20 páginasParalaje ExpoTintaya Chuquimia BeremizAún no hay calificaciones
- Practica 2 GeomaticaDocumento2 páginasPractica 2 GeomaticaLuis FMoralesAún no hay calificaciones
- Molina Corcuera, ManuelDocumento13 páginasMolina Corcuera, ManuelManuel Molina CorcueraAún no hay calificaciones
- Informe Taller 1 Fotogrametria EstereosDocumento11 páginasInforme Taller 1 Fotogrametria EstereosSalin AvellanedaAún no hay calificaciones
- Wuolah Free TEMA 1 PERCEPCION DEL ESPACIODocumento7 páginasWuolah Free TEMA 1 PERCEPCION DEL ESPACIOEvelyn SepulvedaAún no hay calificaciones
- Que es un parestereoscópicaDocumento6 páginasQue es un parestereoscópicaAnonymous JT6V19Aún no hay calificaciones
- Practica N1 Estereos PDFDocumento20 páginasPractica N1 Estereos PDFGianella RosarioAún no hay calificaciones
- Practica n1 Estereoscopia FinalDocumento24 páginasPractica n1 Estereoscopia FinalleandroAún no hay calificaciones
- Tema 2 PsicoDocumento6 páginasTema 2 PsicoSabela BfAún no hay calificaciones
- Principios Basicos de EstereosDocumento26 páginasPrincipios Basicos de EstereosJIMI COHELOAún no hay calificaciones
- EstereoscopíaDocumento7 páginasEstereoscopíaMax MatheoAún no hay calificaciones
- Wuolah Free Tema 3 Percepcion de ObjetosDocumento9 páginasWuolah Free Tema 3 Percepcion de ObjetosEvelyn SepulvedaAún no hay calificaciones
- Fotogrametria y Int.Documento8 páginasFotogrametria y Int.Tintaya Chuquimia BeremizAún no hay calificaciones
- Control de Vision EstereoscopicaDocumento8 páginasControl de Vision EstereoscopicaFelipe Arturo Reyez MarquezAún no hay calificaciones
- Taller de Visión EstereoscopicaDocumento18 páginasTaller de Visión EstereoscopicaJuliana RamirezAún no hay calificaciones
- Historia de La Estereoscopía y Sus AplicacionesDocumento6 páginasHistoria de La Estereoscopía y Sus AplicacionesLuis PerezAún no hay calificaciones
- Indicadores de Profundidad 1Documento10 páginasIndicadores de Profundidad 1RisianegAún no hay calificaciones
- Visión BinocularDocumento9 páginasVisión BinocularJose AlmanzaAún no hay calificaciones
- Informe Vision Estereoscopica - ByronDocumento19 páginasInforme Vision Estereoscopica - ByronByron Stewart Cubides100% (1)
- ESTEREOSDocumento15 páginasESTEREOSRufo BaldoAún no hay calificaciones
- Indicadores de Profundidad 2013Documento15 páginasIndicadores de Profundidad 2013TSHAPIAMAAún no hay calificaciones
- Evaluación visión estereoscópicaDocumento8 páginasEvaluación visión estereoscópicaSantiago VallejoAún no hay calificaciones
- Visión estereoscópica y partes del estereoscopioDocumento10 páginasVisión estereoscópica y partes del estereoscopiorene luis musaja0% (1)
- E Stereo GramaDocumento4 páginasE Stereo GramaMARDUCK2017Aún no hay calificaciones
- Ilusiones ÓpticasDocumento16 páginasIlusiones ÓpticasThomas MinAún no hay calificaciones
- Indicadores de ProfundidadDocumento16 páginasIndicadores de ProfundidadSilvia LeAún no hay calificaciones
- Indicadores de profundidad en la imagenDocumento11 páginasIndicadores de profundidad en la imagenlhbg0% (1)
- Estereoscopio de EspejosDocumento21 páginasEstereoscopio de EspejosMacx Velasquez CoaquiraAún no hay calificaciones
- Poincaré - El Espacio y La Geometría PDFDocumento12 páginasPoincaré - El Espacio y La Geometría PDFCharly GavinAún no hay calificaciones
- EstereopsisDocumento3 páginasEstereopsisximenaAún no hay calificaciones
- Lectura 02 - 1 PERCEPCIÓN ESPACIALDocumento3 páginasLectura 02 - 1 PERCEPCIÓN ESPACIALOlivia ColomboAún no hay calificaciones
- Apuntes Percepción 3DDocumento5 páginasApuntes Percepción 3DCarlos Javier Alba LopezAún no hay calificaciones
- Informe 1 - Principios de Estereoscopia - Castillo Rojas LuisDocumento13 páginasInforme 1 - Principios de Estereoscopia - Castillo Rojas LuisLuis Antonio Castillo Rojas100% (1)
- Scott, Robert Gillam. Fundamentos Del DiseñoDocumento7 páginasScott, Robert Gillam. Fundamentos Del DiseñoKuro NekoAún no hay calificaciones
- EstereoscopíaDocumento2 páginasEstereoscopíazaely22Aún no hay calificaciones
- Scott. Abreviado Equil Atracc MovimientoDocumento7 páginasScott. Abreviado Equil Atracc MovimientoJavier Meza EscalanteAún no hay calificaciones
- Espacio y MovimientoDocumento10 páginasEspacio y MovimientoeasdgraficoAún no hay calificaciones
- Indicadores de EspacioDocumento7 páginasIndicadores de EspacioDenise Correa Diaz0% (1)
- VisionBinocular ClaudiaGoya 27marzoDocumento7 páginasVisionBinocular ClaudiaGoya 27marzoseb kirbyAún no hay calificaciones
- Analisis y Evaluacion de La Vision EstereoscopicaDocumento12 páginasAnalisis y Evaluacion de La Vision Estereoscopicaeque100% (1)
- V - Informe Vision EstereoscópicaDocumento23 páginasV - Informe Vision EstereoscópicaMaria Jose Toro RojasAún no hay calificaciones
- Observar el cielo con el telescopio astronómicoDe EverandObservar el cielo con el telescopio astronómicoCalificación: 5 de 5 estrellas5/5 (1)
- Visión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraDe EverandVisión estéreo por computadora: Explorando la percepción de profundidad en la visión por computadoraAún no hay calificaciones
- Pauta As Dispositivos Alta Resolutividad OftalmologíaDocumento26 páginasPauta As Dispositivos Alta Resolutividad OftalmologíaEvelyn SepulvedaAún no hay calificaciones
- Iluminacion de Interiores para Personas Con Baja VisionDocumento13 páginasIluminacion de Interiores para Personas Con Baja VisionEvelyn SepulvedaAún no hay calificaciones
- Implicaciones VisualesDocumento49 páginasImplicaciones VisualesShyanaAún no hay calificaciones
- Informe Tipo Test DiscDocumento15 páginasInforme Tipo Test DiscJosé Leiva Marín100% (1)
- Instructivo Salas de Procedimientos Médicos y o Enfermería ChileDocumento5 páginasInstructivo Salas de Procedimientos Médicos y o Enfermería Chilecarmen100% (1)
- Requisitos Sala Proc. Oftalmologia Otorrino Audiometria NubleDocumento4 páginasRequisitos Sala Proc. Oftalmologia Otorrino Audiometria NubleMarietha Vargas OjedaAún no hay calificaciones
- Dto 283 - 12 Jul 1997Documento8 páginasDto 283 - 12 Jul 1997Fernanda muñozAún no hay calificaciones
- Medida Comunicacion ColorDocumento60 páginasMedida Comunicacion ColorEvelyn SepulvedaAún no hay calificaciones
- Acordes para TecladoDocumento9 páginasAcordes para TecladoEvelyn SepulvedaAún no hay calificaciones
- PulgaDocumento17 páginasPulgaEvelyn SepulvedaAún no hay calificaciones
- Evaluacion de Los Errores de Refraccion y de La Capacidad Adaptativa FormatoDocumento4 páginasEvaluacion de Los Errores de Refraccion y de La Capacidad Adaptativa FormatoEvelyn SepulvedaAún no hay calificaciones
- Tecno Colo Ergo VisDocumento21 páginasTecno Colo Ergo VisEvelyn SepulvedaAún no hay calificaciones
- Todo Estï¿ en El CerebroDocumento15 páginasTodo Estï¿ en El CerebroEvelyn SepulvedaAún no hay calificaciones
- Medida Comunicacion ColorDocumento60 páginasMedida Comunicacion ColorEvelyn SepulvedaAún no hay calificaciones
- Sociedad 4Documento216 páginasSociedad 4Katerina Ossandon Tapia100% (3)
- Todo Estï¿ en El CerebroDocumento15 páginasTodo Estï¿ en El CerebroEvelyn SepulvedaAún no hay calificaciones
- Wisconsin OrdenadoDocumento25 páginasWisconsin OrdenadoEvelyn SepulvedaAún no hay calificaciones
- Qdoc - Tips Guia Ie EjerciciosDocumento13 páginasQdoc - Tips Guia Ie EjerciciosEvelyn SepulvedaAún no hay calificaciones
- Guia para Seleccionar Gafas de LecturaDocumento39 páginasGuia para Seleccionar Gafas de LecturaEvelyn SepulvedaAún no hay calificaciones
- Rehabilitación Visual en DMREDocumento33 páginasRehabilitación Visual en DMREborisvaleriuzAún no hay calificaciones
- Terapia física en casa de salud San GerardoDocumento4 páginasTerapia física en casa de salud San GerardoEvanns P. Azarte100% (3)
- Ergonomia Visual PDFDocumento52 páginasErgonomia Visual PDFAlejandro CristalesAún no hay calificaciones
- Capitulo 11Documento118 páginasCapitulo 11Macarena AlvarezAún no hay calificaciones
- Preguntas Taller Monopolip PDF FreeDocumento3 páginasPreguntas Taller Monopolip PDF FreeEvelyn SepulvedaAún no hay calificaciones
- Guia de Ejercicios Resuelta PreciosDocumento8 páginasGuia de Ejercicios Resuelta PreciosEvelyn SepulvedaAún no hay calificaciones
- Iluminacion de Interiores para Personas Con Baja VisionDocumento13 páginasIluminacion de Interiores para Personas Con Baja VisionEvelyn SepulvedaAún no hay calificaciones
- wuolah-free-TEMA 4 COLUMNAS DE DOMINANCIAS - EMETROPIZACIÓN 2019Documento28 páginaswuolah-free-TEMA 4 COLUMNAS DE DOMINANCIAS - EMETROPIZACIÓN 2019Evelyn SepulvedaAún no hay calificaciones
- 8Documento2 páginas8Evelyn SepulvedaAún no hay calificaciones
- Examenoftalmologico2013 130102160534 Phpapp02Documento6 páginasExamenoftalmologico2013 130102160534 Phpapp02Paola Vicenta Chalco MorenoAún no hay calificaciones
- AstigmatismoDocumento4 páginasAstigmatismoLuis ValdiviezoAún no hay calificaciones
- Catálogo Actualizado Adulto Air RunningDocumento170 páginasCatálogo Actualizado Adulto Air RunningRaul Diaz huamaniAún no hay calificaciones
- Manual de Señalización ESPDocumento106 páginasManual de Señalización ESPJavier SosaAún no hay calificaciones
- El Campo Visual y Su EstructuraDocumento4 páginasEl Campo Visual y Su EstructuraFrancisco José Méndez70% (10)
- El Puntillismo para NiñosDocumento7 páginasEl Puntillismo para NiñosLilidan MarceAún no hay calificaciones
- Informe #9 Lab Fisica IIDocumento3 páginasInforme #9 Lab Fisica IIanamaylin guerra mendezAún no hay calificaciones
- T.P. Diagnóstico #2 - Grados de IconicidadDocumento3 páginasT.P. Diagnóstico #2 - Grados de IconicidadMelisa ThomasAún no hay calificaciones
- Psicologia Del ColorDocumento4 páginasPsicologia Del ColorJuan SánchezAún no hay calificaciones
- FotografiaDocumento62 páginasFotografiafaldAún no hay calificaciones
- Anexo Imagen SHO Detalles Tecnicos - Jaime ZapataDocumento4 páginasAnexo Imagen SHO Detalles Tecnicos - Jaime Zapatajaimezapata2002Aún no hay calificaciones
- Naturaleza y FenomenosDocumento23 páginasNaturaleza y FenomenosNancy RojasAún no hay calificaciones
- CATARATASDocumento6 páginasCATARATASAdriana SabogalAún no hay calificaciones
- SKU Descripcion Promoción: Producto Nuevo Nuevo IngresoDocumento21 páginasSKU Descripcion Promoción: Producto Nuevo Nuevo IngresoAldo Enrrique Rivas O̲̲̅̅f̲̲̅̅i̲̲̅̅c̲̲̅̅i̲̲̅̅a̲̲̅̅l̲̲̅̅'̲̲̅̅F̲̲̅̅b̲̲̅̅Aún no hay calificaciones
- Allegreto OculyzerDocumento32 páginasAllegreto OculyzerPatricia Paz Marquez VivancoAún no hay calificaciones
- Manual de Identidad Visual CorporativaDocumento90 páginasManual de Identidad Visual CorporativaPaolo FioreAún no hay calificaciones
- Historia de La Fotografía: ProgramaDocumento2 páginasHistoria de La Fotografía: ProgramaalejomaxAún no hay calificaciones
- Anatomia Uvea - agosto2018.MR2.Flor - Arenas.INO PDFDocumento50 páginasAnatomia Uvea - agosto2018.MR2.Flor - Arenas.INO PDFElizabeth Santos100% (1)
- Codigo de Cap.Documento1 páginaCodigo de Cap.juanAún no hay calificaciones
- Manual de Marca UNISALLEDocumento78 páginasManual de Marca UNISALLEdiegodfrfAún no hay calificaciones
- Módulo2FotogrametríaPuntosApoyoDocumento15 páginasMódulo2FotogrametríaPuntosApoyoBlauLichtAún no hay calificaciones
- Walltopia DIY Boulders BrochureDocumento4 páginasWalltopia DIY Boulders BrochurePatricia MartínezAún no hay calificaciones
- 94 Color ChartDocumento2 páginas94 Color ChartDiego SAún no hay calificaciones
- Magnificación y Ayudas VisualesDocumento4 páginasMagnificación y Ayudas VisualesMario JotaAún no hay calificaciones
- Color Clase 6Documento30 páginasColor Clase 6Rishard NuñezAún no hay calificaciones
- Points de Vue 73 EspanolDocumento82 páginasPoints de Vue 73 EspanolWendi Ioch100% (1)
- La anatomía y fisiología del ojoDocumento21 páginasLa anatomía y fisiología del ojonando_dcAún no hay calificaciones