También podría gustarte
- Introducción a las señales y sistemasDe EverandIntroducción a las señales y sistemasCalificación: 4.5 de 5 estrellas4.5/5 (3)
- Ejercicios de Integrales y Ecuaciones Integrales-DiferencialesDe EverandEjercicios de Integrales y Ecuaciones Integrales-DiferencialesAún no hay calificaciones
- La Transformada de Laplace PDFDocumento122 páginasLa Transformada de Laplace PDFAgusto Daniel Purizaca MontenegroAún no hay calificaciones
- Dialnet ProblemasDeResistenciaDeMateriales 267957 PDFDocumento460 páginasDialnet ProblemasDeResistenciaDeMateriales 267957 PDFjohan100% (2)
- 3.11 Trasformada de Laplace de Una Función Periódica.Documento8 páginas3.11 Trasformada de Laplace de Una Función Periódica.-Misael Canela Román-100% (1)
- Análisis de La Respuesta Transitoria y EstacionariaDocumento27 páginasAnálisis de La Respuesta Transitoria y EstacionariaAlfredo Gil Velasco100% (1)
- Integrales FormulasDocumento13 páginasIntegrales FormulasKatherine Magdalena Andrade FuentealbaAún no hay calificaciones
- Respuesta en el tiempo de sistemas de 1o ordenDocumento27 páginasRespuesta en el tiempo de sistemas de 1o ordenMiguel GuerreroAún no hay calificaciones
- Funcion de TransferenciaDocumento24 páginasFuncion de TransferenciaSergio Zuniga QuispeAún no hay calificaciones
- Modelado de Circuitos ElectricosDocumento30 páginasModelado de Circuitos Electricosjlola100% (1)
- Derivadas, CalculoDocumento13 páginasDerivadas, CalculoDionisio AriasAún no hay calificaciones
- Análisis de Respuesta de TiempoDocumento11 páginasAnálisis de Respuesta de TiempoDario Manobanda100% (1)
- Control Primer ParcialDocumento54 páginasControl Primer ParcialRafaelArnaldoPachecoAún no hay calificaciones
- Smith Corripio Tema2 LaplaceTransformDocumento8 páginasSmith Corripio Tema2 LaplaceTransformverdugrAún no hay calificaciones
- Funcion de TransferenciaDocumento12 páginasFuncion de TransferenciaLuis Castro100% (1)
- 3.4.10 - Tranformada de Laplace de La Funcion Delta DiracDocumento4 páginas3.4.10 - Tranformada de Laplace de La Funcion Delta DiracKandro King Aguilar AndradeAún no hay calificaciones
- Funciones DiscontinuaDocumento20 páginasFunciones DiscontinuaEdgar Urbano LandaAún no hay calificaciones
- Análisis de La Respuesta Transitoria en El TiempoDocumento15 páginasAnálisis de La Respuesta Transitoria en El TiempoSandra RodriguezAún no hay calificaciones
- INFORMEDocumento10 páginasINFORMEBryan Antonio Tandazo YaguanaAún no hay calificaciones
- ANALISIS DE RESPUESTA TRANSITORIA2 (Autoguardado)Documento34 páginasANALISIS DE RESPUESTA TRANSITORIA2 (Autoguardado)Mayka GarciaAún no hay calificaciones
- Análisis de sistemas lineales invariantes en el tiempo mediante convoluciónDocumento14 páginasAnálisis de sistemas lineales invariantes en el tiempo mediante convoluciónSergio CapilleraAún no hay calificaciones
- minutaDocumento9 páginasminutaJESUS ALVAREZAún no hay calificaciones
- Transformada de LaplaceDocumento2 páginasTransformada de LaplaceOsledi Rotcéh Cubas VegaAún no hay calificaciones
- Tarea3 JoseVergara SignalsAndSystemsDocumento23 páginasTarea3 JoseVergara SignalsAndSystemsJOSE ALFREDO VERGARA BEJARANOAún no hay calificaciones
- Funcion de TransferenciaDocumento14 páginasFuncion de TransferenciaSADszfdgfhgjhmj,Aún no hay calificaciones
- Bloqueador de Orden UnoDocumento6 páginasBloqueador de Orden UnoEnrique Huayra SumariaAún no hay calificaciones
- Trabajo de ConvolucionDocumento32 páginasTrabajo de Convolucioncapq2011Aún no hay calificaciones
- LaplaceDocumento6 páginasLaplaceThe DonoAún no hay calificaciones
- Unidad 3 - Análisis Transitorio y en Estado EstableDocumento22 páginasUnidad 3 - Análisis Transitorio y en Estado Estableangel9021Aún no hay calificaciones
- Respuesta Dinamica GabDocumento24 páginasRespuesta Dinamica GabJosuè Priego SanabriaAún no hay calificaciones
- Unidad 2 - Modelado MatemáticoDocumento30 páginasUnidad 2 - Modelado Matemáticoangel9021Aún no hay calificaciones
- UNIDAD 3 Respuesta Dinamica Ing ControlDocumento11 páginasUNIDAD 3 Respuesta Dinamica Ing ControlJose Alfredo Salas PanfiloAún no hay calificaciones
- Transformada de LaplaceDocumento28 páginasTransformada de Laplaceangus a.Aún no hay calificaciones
- Análisis de circuitos eléctricos: Función de transferencia y diagramas de BodeDocumento5 páginasAnálisis de circuitos eléctricos: Función de transferencia y diagramas de BodeNajely JessicaAún no hay calificaciones
- PDF Unidad 3 Respuesta Dinamica Ing Control DDDocumento11 páginasPDF Unidad 3 Respuesta Dinamica Ing Control DDAlexis PinedaAún no hay calificaciones
- Transformada Z y FourierDocumento7 páginasTransformada Z y FourierRodrigo Lincer CeballosAún no hay calificaciones
- Expo Tema 4.2Documento23 páginasExpo Tema 4.2Mariana Leyva EspinozaAún no hay calificaciones
- Apunte Unidad IIDocumento22 páginasApunte Unidad IIJavier Veloz MuñozAún no hay calificaciones
- Consulta Teorema Inicial Jonathan PazmayDocumento5 páginasConsulta Teorema Inicial Jonathan PazmayJonathan PazmayAún no hay calificaciones
- PDF Unidad 3 Respuesta Dinamica Ing Control DDDocumento11 páginasPDF Unidad 3 Respuesta Dinamica Ing Control DDAlexis PinedaAún no hay calificaciones
- SistemasPrimerOrdenRespuestasDocumento23 páginasSistemasPrimerOrdenRespuestasPedro GamezAún no hay calificaciones
- La Convolucion en La Teoria de Señales FichambaDocumento8 páginasLa Convolucion en La Teoria de Señales FichambaLuis BenavidesAún no hay calificaciones
- Metodo Transformada de LaplaceDocumento12 páginasMetodo Transformada de LaplaceHiram LoyaAún no hay calificaciones
- 6.respuesta Completa Trans+EstableDocumento56 páginas6.respuesta Completa Trans+EstableMario ChacónAún no hay calificaciones
- Guion de Clase # 3.analisis de La Respuesta Transitoria.Documento7 páginasGuion de Clase # 3.analisis de La Respuesta Transitoria.Alexander MendezAún no hay calificaciones
- Fundamentos de sistemas y ecuaciones diferencialesDocumento25 páginasFundamentos de sistemas y ecuaciones diferencialeskevinAún no hay calificaciones
- Transformada de Laplace: Introducción y DefiniciónDocumento26 páginasTransformada de Laplace: Introducción y DefiniciónLeTy OliveraAún no hay calificaciones
- Unidad 2 Modelado de Sistemas DinámicosDocumento22 páginasUnidad 2 Modelado de Sistemas DinámicosAlfonso MartinezAún no hay calificaciones
- Comandos de MatlabDocumento5 páginasComandos de Matlabjesus de la cruzAún no hay calificaciones
- Ejemplo de Cálculo Numérico de La Integral de Duhamel Con MatlabDocumento9 páginasEjemplo de Cálculo Numérico de La Integral de Duhamel Con MatlabJose Ivan CarrilloAún no hay calificaciones
- Teorema de TraslaciónDocumento4 páginasTeorema de TraslaciónJesús VelásquezAún no hay calificaciones
- Funcion de TransferenciaDocumento5 páginasFuncion de TransferenciaMendez FranciscoAún no hay calificaciones
- Transformadas de Laplace: Introducción a la transformada integral de Laplace y sus aplicacionesDocumento31 páginasTransformadas de Laplace: Introducción a la transformada integral de Laplace y sus aplicacionesMalverde Ghc Hernandez CarpioAún no hay calificaciones
- Trabajo Final - Mate IvDocumento9 páginasTrabajo Final - Mate IvisabelAún no hay calificaciones
- Respuesta DinamicaDocumento31 páginasRespuesta DinamicaJosuè Priego SanabriaAún no hay calificaciones
- Analisis Entrada Salida de Sistemas en El TiempoDocumento6 páginasAnalisis Entrada Salida de Sistemas en El TiempoSebastián Muñoz AndradeAún no hay calificaciones
- Función de TransferenciaDocumento5 páginasFunción de TransferenciaJose EkAún no hay calificaciones
- Diseño de controladores químicosDocumento47 páginasDiseño de controladores químicosYolix Escobar MartinezAún no hay calificaciones
- Respuestas de sistemas ante entrada escalónDocumento9 páginasRespuestas de sistemas ante entrada escalónLeandro SanchezAún no hay calificaciones
- Tarea 1Documento1 páginaTarea 1Robert Alfonsin AlgarrobaAún no hay calificaciones
- Tarea N°1 Geometria Plana - 2022Documento2 páginasTarea N°1 Geometria Plana - 2022Robert Alfonsin AlgarrobaAún no hay calificaciones
- Check VNC 001Documento1 páginaCheck VNC 001Robert Alfonsin AlgarrobaAún no hay calificaciones
- TV C4bitsDocumento1 páginaTV C4bitsRobert Alfonsin AlgarrobaAún no hay calificaciones
- MMC v1.02Documento11 páginasMMC v1.02Robert Alfonsin AlgarrobaAún no hay calificaciones
- Replanteo de Ejes de Columnas y Niveles de Muro v1.02-DESICA PPL AExt v1.02Documento1 páginaReplanteo de Ejes de Columnas y Niveles de Muro v1.02-DESICA PPL AExt v1.02Robert Alfonsin AlgarrobaAún no hay calificaciones
- Comportamiento de la tasa de cambio COP-USD y salario mínimo en Chile y Colombia 2018-2022Documento6 páginasComportamiento de la tasa de cambio COP-USD y salario mínimo en Chile y Colombia 2018-2022Robert Alfonsin AlgarrobaAún no hay calificaciones
- Tarea#5 1Documento1 páginaTarea#5 1Robert Alfonsin AlgarrobaAún no hay calificaciones
- Posicionamiento de Maquinaria V1.01-Posicionamiento V 1.01Documento1 páginaPosicionamiento de Maquinaria V1.01-Posicionamiento V 1.01Robert Alfonsin AlgarrobaAún no hay calificaciones
- Matematicas Financiera - Final 12°Documento2 páginasMatematicas Financiera - Final 12°Robert Alfonsin AlgarrobaAún no hay calificaciones
- Nivelación 3005 CálculosDocumento1 páginaNivelación 3005 CálculosRobert Alfonsin AlgarrobaAún no hay calificaciones
- Planta Arquitectónica 2022Documento1 páginaPlanta Arquitectónica 2022Robert Alfonsin AlgarrobaAún no hay calificaciones
- Binomial ResolverDocumento26 páginasBinomial ResolverRobert Alfonsin AlgarrobaAún no hay calificaciones
- Presupuesto Maestro de CapacitaciónDocumento1 páginaPresupuesto Maestro de CapacitaciónRobert Alfonsin AlgarrobaAún no hay calificaciones
- Muestreo Aleatorio Estratificado (Mae) DiapositivasDocumento38 páginasMuestreo Aleatorio Estratificado (Mae) DiapositivasRobert Alfonsin AlgarrobaAún no hay calificaciones
- Chitré Santiago David: 2, - Total Familias 45000Documento6 páginasChitré Santiago David: 2, - Total Familias 45000Robert Alfonsin AlgarrobaAún no hay calificaciones
- Taller 2 30-06-2022Documento6 páginasTaller 2 30-06-2022Robert Alfonsin AlgarrobaAún no hay calificaciones
- Muestras pescado y camaronesDocumento1 páginaMuestras pescado y camaronesRobert Alfonsin AlgarrobaAún no hay calificaciones
- Problema RutaDocumento2 páginasProblema RutaRobert Alfonsin AlgarrobaAún no hay calificaciones
- Práctica Curvas de Nivel - Resp v3.0Documento6 páginasPráctica Curvas de Nivel - Resp v3.0Robert Alfonsin AlgarrobaAún no hay calificaciones
- Binomial ResolverDocumento26 páginasBinomial ResolverRobert Alfonsin AlgarrobaAún no hay calificaciones
- Taller 3 Distribucion de Frecuencia RepasoDocumento2 páginasTaller 3 Distribucion de Frecuencia RepasoRobert Alfonsin Algarroba100% (1)
- IPPTCap 010Documento41 páginasIPPTCap 010Robert Alfonsin AlgarrobaAún no hay calificaciones
- AFIC Cap 5 Flujo de FondosDocumento17 páginasAFIC Cap 5 Flujo de FondosNataly PintoAún no hay calificaciones
- Ejercicios de Aproximacion y TruncamientoDocumento1 páginaEjercicios de Aproximacion y TruncamientoRobert Alfonsin AlgarrobaAún no hay calificaciones
- Panam Seas of The WorldDocumento8 páginasPanam Seas of The WorldRobert Alfonsin AlgarrobaAún no hay calificaciones
- Diagrama de Venn Problema 4Documento1 páginaDiagrama de Venn Problema 4Robert Alfonsin AlgarrobaAún no hay calificaciones
- Parcial 1 - GRUPO TSOCIAL RespDocumento6 páginasParcial 1 - GRUPO TSOCIAL RespRobert Alfonsin AlgarrobaAún no hay calificaciones
- Tablas y Gráficas de Funciones Excel 1.03Documento2 páginasTablas y Gráficas de Funciones Excel 1.03Robert Alfonsin AlgarrobaAún no hay calificaciones
- Algebra ApuntesDocumento5 páginasAlgebra ApuntesAndres MarceloAún no hay calificaciones
- Cap IV IedoiDocumento40 páginasCap IV Iedoiwwe0% (1)
- Series - de - Fourier 2018Documento8 páginasSeries - de - Fourier 2018Zaid Saavedra MendozaAún no hay calificaciones
- Modulo Talleres CalculoDocumento49 páginasModulo Talleres CalculoLuis EscobarAún no hay calificaciones
- Practica Invernal 4 Am 1Documento4 páginasPractica Invernal 4 Am 1caceres cristianAún no hay calificaciones
- Regla de La CadenaDocumento16 páginasRegla de La CadenaAnael RLAún no hay calificaciones
- Clase 1Documento20 páginasClase 1AnggíeP-fAún no hay calificaciones
- Actividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo 2 - (Grupo b03)Documento5 páginasActividad de Puntos Evaluables - Escenario 2 - Primer Bloque-Ciencias Basicas - Virtual - Cálculo 2 - (Grupo b03)Alejo HernandezAún no hay calificaciones
- Unidad 3 LogaritmosDocumento8 páginasUnidad 3 LogaritmosÁngela TrujilloAún no hay calificaciones
- S4 - Funciones IDocumento29 páginasS4 - Funciones IAlexander Mendoza BautistaAún no hay calificaciones
- Ejercicios Aplicaciones OrtogonalesDocumento3 páginasEjercicios Aplicaciones OrtogonalesJustin RobinsonAún no hay calificaciones
- Ecuaciones diferenciales método series potencia y LaplaceDocumento36 páginasEcuaciones diferenciales método series potencia y LaplaceMile Contreras RoaAún no hay calificaciones
- La Transformada Rápida de Fourier Es Un Algoritmo Que Permite Calcular Eficientemente La Transforma de Fourier Discreta y Su InversaDocumento6 páginasLa Transformada Rápida de Fourier Es Un Algoritmo Que Permite Calcular Eficientemente La Transforma de Fourier Discreta y Su InversaMILAGROS CARMEN SEVINCHA YANAAún no hay calificaciones
- Límites y continuidad de funcionesDocumento50 páginasLímites y continuidad de funcionesdaniel viteriAún no hay calificaciones
- Ejercicios, Página 5: 1, 2 y 3. Análisis IIIDocumento5 páginasEjercicios, Página 5: 1, 2 y 3. Análisis IIIHans Müller Santa Cruz100% (3)
- Guía #3 Matemática Modelado Del Mundo Con Funciones Exponenciales y LogaritmosDocumento11 páginasGuía #3 Matemática Modelado Del Mundo Con Funciones Exponenciales y LogaritmosCarlos GajardoAún no hay calificaciones
- Ob Tener Arch Ivo Recur SoDocumento5 páginasOb Tener Arch Ivo Recur SoAlexander estela zamoraAún no hay calificaciones
- Entrega FinalDocumento36 páginasEntrega Finalskay cAún no hay calificaciones
- Silabo Am 1 - 2022-IDocumento3 páginasSilabo Am 1 - 2022-Ielvis Yorland Pozo CastroAún no hay calificaciones
- Prueba de Desarrollo Nº4Documento24 páginasPrueba de Desarrollo Nº4Elsa Cuadros cardenasAún no hay calificaciones
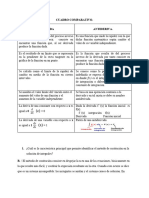
- Cuadro Comparativo Derivada y Antiderivada..Documento3 páginasCuadro Comparativo Derivada y Antiderivada..Ximena HERNANDEZ DORIAAún no hay calificaciones
- TEST - Homotecia 1º Medio.Documento2 páginasTEST - Homotecia 1º Medio.Huachipato PencoAún no hay calificaciones
- Integracion AproximadaDocumento10 páginasIntegracion AproximadaFiorella GonzalesAún no hay calificaciones
- Determinantes de matrices: Ejercicios resueltos de cálculo y propiedadesDocumento4 páginasDeterminantes de matrices: Ejercicios resueltos de cálculo y propiedadesAnna SorianoAún no hay calificaciones
- GUIA No 01 ANTIDERIVADA E INTEGRALES INDEFINIDASDocumento10 páginasGUIA No 01 ANTIDERIVADA E INTEGRALES INDEFINIDASVICTOR HUGO ANGULO LIZALDAAún no hay calificaciones
- Matemática Sem-14 Sesión-14 2022-1 Funciones Especiales (Exponencial y Logarítmica)Documento17 páginasMatemática Sem-14 Sesión-14 2022-1 Funciones Especiales (Exponencial y Logarítmica)TequilaAún no hay calificaciones
- FUNCIONES MATEMATICAS - OdtDocumento4 páginasFUNCIONES MATEMATICAS - OdtAngie AvilaAún no hay calificaciones
- Clase 3-DerivadasDocumento23 páginasClase 3-DerivadasRODOLFO QUISPE SALAZARAún no hay calificaciones