También podría gustarte
- Como Usar Un Medidor de Tension para Una Correa en V PDFDocumento3 páginasComo Usar Un Medidor de Tension para Una Correa en V PDFEdwin LopezAún no hay calificaciones
- Análisis de Fallas en RodamientosDocumento20 páginasAnálisis de Fallas en RodamientosMarco Antonio Rivera Miranda100% (2)
- Máquinas de Balanceo GravitatoriasDocumento5 páginasMáquinas de Balanceo GravitatoriasEddy Quispe GaglayAún no hay calificaciones
- Diagnostico Del Desbalance de Masa en Un Rotor en Un PlanoDocumento11 páginasDiagnostico Del Desbalance de Masa en Un Rotor en Un PlanoJonas Negretty100% (1)
- La Tribología y Reductor Dde VelocidadDocumento10 páginasLa Tribología y Reductor Dde VelocidadANDREINA RAMOSAún no hay calificaciones
- Torno y Máquinas Alesadoras.2Documento19 páginasTorno y Máquinas Alesadoras.2Felipe Ortiz100% (1)
- Guía de Bombas CentrífugasDocumento215 páginasGuía de Bombas CentrífugasSteven TorresAún no hay calificaciones
- Prueba Analisis de VibracionesDocumento3 páginasPrueba Analisis de Vibracioneslucas . asAún no hay calificaciones
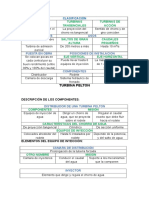
- CLASIFICACIÓN Turbina PeltonDocumento3 páginasCLASIFICACIÓN Turbina PeltonLeonelFernandezFernandezAún no hay calificaciones
- Cuestionario Bomba CentrífugaDocumento2 páginasCuestionario Bomba CentrífugaLoading YuriAún no hay calificaciones
- Metodo Matricial en Redes de TuberiasDocumento4 páginasMetodo Matricial en Redes de TuberiasHENRY AMYSTAún no hay calificaciones
- RESORTESDocumento22 páginasRESORTESjhony riosAún no hay calificaciones
- Arco PlasmaticoDocumento14 páginasArco PlasmaticoeduardoslmAún no hay calificaciones
- Presentation Hydrau Class 03 Cn5Documento10 páginasPresentation Hydrau Class 03 Cn5CRISTIAN LEONARDO RAMOS SERRANOAún no hay calificaciones
- Desalineamiento y balanceo de maquinariaDocumento30 páginasDesalineamiento y balanceo de maquinariaEduardo Mendoza Eduardo MendozaAún no hay calificaciones
- FTensado Medición 5453 BrowningDocumento2 páginasFTensado Medición 5453 BrowningSupervisor100% (1)
- Balanceo dinámico de rotoresDocumento40 páginasBalanceo dinámico de rotoresVictor Vera SAún no hay calificaciones
- Seleccion de Rodamientos Segun IsoDocumento37 páginasSeleccion de Rodamientos Segun IsorpichoAún no hay calificaciones
- Carta EspectrosDocumento6 páginasCarta EspectrosJavierAún no hay calificaciones
- TesisDocumento61 páginasTesisBernardo AraujoAún no hay calificaciones
- Medición Con AlexómetroDocumento8 páginasMedición Con AlexómetroPalomino Rosales Smith JohnAún no hay calificaciones
- Turbinas de VaporDocumento17 páginasTurbinas de VaporLuis Fernando ContrerasAún no hay calificaciones
- Practica 2 MEC 3330 Castelo Arguellas CristofferDocumento7 páginasPractica 2 MEC 3330 Castelo Arguellas CristofferCristoffer Castelo ArgüellasAún no hay calificaciones
- Laboratorio 3 Maquinas Eléctricas 2Documento8 páginasLaboratorio 3 Maquinas Eléctricas 2Mark OnofreAún no hay calificaciones
- Cono de AbramsDocumento1 páginaCono de AbramsJose MoralesAún no hay calificaciones
- Balanceo PruebaDocumento132 páginasBalanceo PruebaJaime Martin Torres HuamaniAún no hay calificaciones
- Clase 04 - NSR-10 Capitulos B1-B5Documento48 páginasClase 04 - NSR-10 Capitulos B1-B5sebastiantobon85100% (1)
- Tema I TribologíaDocumento50 páginasTema I TribologíaAnelson RamirezAún no hay calificaciones
- Análisis Sísmico de Una Edificación Con Disipadores de Fluido ViscosoDocumento3 páginasAnálisis Sísmico de Una Edificación Con Disipadores de Fluido ViscosoOscar Orrillo VegaAún no hay calificaciones
- Breve Teoria de Analisis de VibracionesDocumento30 páginasBreve Teoria de Analisis de Vibracionesantonio peraltaAún no hay calificaciones
- ESI Pipeline Studio 4Documento2 páginasESI Pipeline Studio 4jorge1952Aún no hay calificaciones
- Desarrollo de Software para Balanceo Estático de RotoresDocumento6 páginasDesarrollo de Software para Balanceo Estático de RotoresMartin Lira EvansAún no hay calificaciones
- Mod 1 Bombas CentrifugasDocumento20 páginasMod 1 Bombas CentrifugasJhunyor VasquezAún no hay calificaciones
- BOMBAS CENTRIFUGAS ResumenDocumento2 páginasBOMBAS CENTRIFUGAS ResumenNathy SilvanaAún no hay calificaciones
- ALINEACIONDocumento8 páginasALINEACIONjuan david lucumiAún no hay calificaciones
- Severidad Vibratoria Parte IDocumento59 páginasSeveridad Vibratoria Parte IFrancisco Eduardo Paz TissavakAún no hay calificaciones
- A.1 Introducción A La TribologíaDocumento34 páginasA.1 Introducción A La TribologíaUriParraAún no hay calificaciones
- Calculos-Resultados y Conclusiones de TURBINA PELTONDocumento11 páginasCalculos-Resultados y Conclusiones de TURBINA PELTONJose Solis PaucarpuraAún no hay calificaciones
- Ensayo AcoplamientosDocumento15 páginasEnsayo AcoplamientosjohannaAún no hay calificaciones
- Expo 2Documento16 páginasExpo 2miguelAún no hay calificaciones
- NSK Rodamientos Catalogo GeneralDocumento3 páginasNSK Rodamientos Catalogo GeneralFamily HTAún no hay calificaciones
- Balanceo InformeDocumento5 páginasBalanceo InformeJorge Mora MartinezAún no hay calificaciones
- Ba Liftket SpanischDocumento40 páginasBa Liftket Spanischivan rene montealegre tocoraAún no hay calificaciones
- Balanceo Estatico Dinamico, Ordóñez-VasquezDocumento5 páginasBalanceo Estatico Dinamico, Ordóñez-VasquezJuan Esteban Ordoñez BonillaAún no hay calificaciones
- Analisis de Flujo en Un Impulsor Radial PDFDocumento123 páginasAnalisis de Flujo en Un Impulsor Radial PDFEduardo QuirozAún no hay calificaciones
- Unidad 1 y 2Documento56 páginasUnidad 1 y 2Felipe López GarduzaAún no hay calificaciones
- AlineamientoDocumento43 páginasAlineamientoHugo HzGzAún no hay calificaciones
- RCM II - MotorreductorDocumento20 páginasRCM II - MotorreductorRonal AbrahamAún no hay calificaciones
- RCM - Mantenimiento Centrado enDocumento6 páginasRCM - Mantenimiento Centrado enArmando BernalAún no hay calificaciones
- Leyes SemejanzaDocumento8 páginasLeyes SemejanzaYamith GomezAún no hay calificaciones
- Bandas TransportadorasDocumento33 páginasBandas TransportadorasJosue Calderón JuarezAún no hay calificaciones
- Instalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con ContactoresDocumento9 páginasInstalacion Arranque e Inversion de Marcha Del Motor Asincrono Trifasico Con ContactoresDiego FrisanchoAún no hay calificaciones
- Diapositivas de Balanceo de Masas RotativasDocumento22 páginasDiapositivas de Balanceo de Masas RotativasjeminaAún no hay calificaciones
- Eval vib máq ISODocumento20 páginasEval vib máq ISOCristian EdgardoAún no hay calificaciones
- Conceptos Básicos de La VibraciónDocumento16 páginasConceptos Básicos de La VibraciónrobertolpAún no hay calificaciones
- Vibraciones MecánicasDocumento14 páginasVibraciones MecánicasKyle falcon perezAún no hay calificaciones
- TALLER VIBRACIONES MECANICAS FinalDocumento6 páginasTALLER VIBRACIONES MECANICAS FinalJary GuzmanAún no hay calificaciones
- Movimiento ForzadoDocumento7 páginasMovimiento ForzadoAnonymous wH8gUfAFn0% (1)
- Vibraciones MecánicaDocumento17 páginasVibraciones Mecánicajeankeh perezAún no hay calificaciones
- Semana6 I.sr 09mayo'22.lunesDocumento11 páginasSemana6 I.sr 09mayo'22.lunesCristhian MejíaAún no hay calificaciones
- Fase 3 - Diana Marcela TovarDocumento7 páginasFase 3 - Diana Marcela Tovardiana mercedes mora gomezAún no hay calificaciones
- Conversión de UnidadesDocumento2 páginasConversión de Unidadesprofesorlalin100% (1)
- Hoja de Trabajo TorqueDocumento3 páginasHoja de Trabajo TorqueClauMarínAún no hay calificaciones
- Trabajo de Caida LibreDocumento12 páginasTrabajo de Caida LibreNestor Sanchez67% (3)
- Método de Lagrange para sistemas conservativos y vibraciones mecánicasDocumento78 páginasMétodo de Lagrange para sistemas conservativos y vibraciones mecánicasPablo Rodolfo Sánchez RamosAún no hay calificaciones
- S12.s2 - HT TrabajoDocumento3 páginasS12.s2 - HT TrabajoJhon Kevin Vasquez TarrilloAún no hay calificaciones
- Resistividad eléctricaDocumento31 páginasResistividad eléctricaJUAN CAMILO CESPEDES ROMEROAún no hay calificaciones
- ELECTROTECNIA Clase Virtual 6 - Sandra HuamánDocumento24 páginasELECTROTECNIA Clase Virtual 6 - Sandra Huamánjhon caceresAún no hay calificaciones
- Antologia de QuimicaDocumento10 páginasAntologia de QuimicaJose Manuel Constance AngeloveAún no hay calificaciones
- Comprendes Las Leyes de La Electricidad PDFDocumento40 páginasComprendes Las Leyes de La Electricidad PDFRobe01100% (1)
- Masa MagraDocumento1 páginaMasa MagraMiguel RojasAún no hay calificaciones
- Trabajo y Potencia 2Documento3 páginasTrabajo y Potencia 2Angel Francisco Roman RosilloAún no hay calificaciones
- Informe Periodo de Péndulo SimpleDocumento6 páginasInforme Periodo de Péndulo SimpleLincoln Gomez GomezAún no hay calificaciones
- Ley de FaradayDocumento3 páginasLey de FaradayrobamauanAún no hay calificaciones
- Movimientos con MRU y aceleración constanteDocumento9 páginasMovimientos con MRU y aceleración constantePedro Andrés cancuAún no hay calificaciones
- 04 Teorema Del Momento CinéticoDocumento37 páginas04 Teorema Del Momento CinéticoVictor Verlaine100% (1)
- Examen de Física 2do Año: Problemas y Conceptos ClaveDocumento4 páginasExamen de Física 2do Año: Problemas y Conceptos ClaveTacna EducaAún no hay calificaciones
- Superficies EquiSuperficies EquinopotencialespotencialesDocumento9 páginasSuperficies EquiSuperficies EquinopotencialespotencialesTathii Doloriert DonatoAún no hay calificaciones
- Taller Mecánica EstructuralDocumento5 páginasTaller Mecánica EstructuralCamila GarcíaAún no hay calificaciones
- 02 Dinamica Rotacional I V2 PDFDocumento2 páginas02 Dinamica Rotacional I V2 PDFDiego AlejandroAún no hay calificaciones
- EXAMEN 2dos Quimica 2019 - 2020Documento8 páginasEXAMEN 2dos Quimica 2019 - 2020Jorge AuquillaAún no hay calificaciones
- M1 1862024 Jesusmontantes PBDocumento37 páginasM1 1862024 Jesusmontantes PBJesus MontantesAún no hay calificaciones
- Informe DensidadesDocumento7 páginasInforme DensidadesVOID LOOPAún no hay calificaciones
- ANAE - Proyecto - Enunciado - T3 ParcialDocumento3 páginasANAE - Proyecto - Enunciado - T3 ParcialAndresUmañaAún no hay calificaciones
- MovSemiparabólicoLab5Documento6 páginasMovSemiparabólicoLab5Juan Pablo Bernal ÑAún no hay calificaciones
- Ejercicios Resueltos de Vibraciones MecanicasDocumento21 páginasEjercicios Resueltos de Vibraciones MecanicasJoel Villca100% (4)
- Movimiento relativo y sistemas de referenciaDocumento8 páginasMovimiento relativo y sistemas de referenciaAlfonso CamarilloAún no hay calificaciones
- LaboratoriosFisica1 CarlosZepeda 62111620Documento43 páginasLaboratoriosFisica1 CarlosZepeda 62111620Carlos David Zepeda RodriguezAún no hay calificaciones
- Semana 01Documento2 páginasSemana 01Robert EdwardAún no hay calificaciones