También podría gustarte
- La Preciosa Hermana Del Duque VillanoDocumento2136 páginasLa Preciosa Hermana Del Duque VillanoMiririam Domínguez6% (17)
- S5 - Mapa de Presencia E-Commerce - EliabRojasFloresDocumento5 páginasS5 - Mapa de Presencia E-Commerce - EliabRojasFloresNathan RFAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Espacios Vectoriales - TrabajoDocumento34 páginasEspacios Vectoriales - TrabajoLeticia MirezAún no hay calificaciones
- 10 PREDICCION DE PROPIEDADES TERMOFISICAS EN LOS ALIMENTOSs PDFDocumento36 páginas10 PREDICCION DE PROPIEDADES TERMOFISICAS EN LOS ALIMENTOSs PDFMagdalena MAAún no hay calificaciones
- Espacio VectorialDocumento13 páginasEspacio VectorialCelestino VargasAún no hay calificaciones
- Clase 5 Cabeza y CuelloDocumento11 páginasClase 5 Cabeza y CuelloCristobal Alexander Alcantara YañezAún no hay calificaciones
- Resumen para Algebra II PDFDocumento10 páginasResumen para Algebra II PDFDavid NavarreteAún no hay calificaciones
- Tema2 Espacios Vectoriales ADocumento36 páginasTema2 Espacios Vectoriales ASergio AymiAún no hay calificaciones
- Categorías DubucDocumento84 páginasCategorías DubucAndres NaranjoAún no hay calificaciones
- DualDocumento2 páginasDualGonzalo de SouzaAún no hay calificaciones
- Espacio S Vectorial Es 0809Documento16 páginasEspacio S Vectorial Es 0809CAMPOAún no hay calificaciones
- Álgebra Lineal I (Grupo 4112) - Clase 3. Ejercicios ResueltosDocumento4 páginasÁlgebra Lineal I (Grupo 4112) - Clase 3. Ejercicios ResueltosFernando MoralesAún no hay calificaciones
- Pesca Lar Mates 1Documento5 páginasPesca Lar Mates 1Ana RuscherAún no hay calificaciones
- Espacio Vectorial y Subespacio VectorialDocumento8 páginasEspacio Vectorial y Subespacio VectorialRafael CórdovaAún no hay calificaciones
- 07 - Espacios VectorialesDocumento21 páginas07 - Espacios VectorialesSebastian VeraAún no hay calificaciones
- Resumen - Tema - 3 - Espacios VectorialesDocumento7 páginasResumen - Tema - 3 - Espacios VectorialesDaniel GonzaloAún no hay calificaciones
- Geo Apunte PulentisimoDocumento160 páginasGeo Apunte PulentisimoJaviera Bastías GonzálezAún no hay calificaciones
- Espacios Vectoriales-PDocumento26 páginasEspacios Vectoriales-PSIMON LOPEZ ARCILAAún no hay calificaciones
- TEMA #1 ESPACIOS VECTORIALES (En Revisión) PDFDocumento16 páginasTEMA #1 ESPACIOS VECTORIALES (En Revisión) PDFEric EncinaAún no hay calificaciones
- Matemáticas ENMDocumento258 páginasMatemáticas ENMfguzcre100% (1)
- 1 - Reunion1 - EVDocumento16 páginas1 - Reunion1 - EVNicolás DarnayAún no hay calificaciones
- Capítulo 4Documento21 páginasCapítulo 4Eduardo Gindel LadowskiAún no hay calificaciones
- Algebra II Lista 5Documento2 páginasAlgebra II Lista 5Ars Arturo RGAún no hay calificaciones
- Apuntes Algebra Lineal FcamachoDocumento23 páginasApuntes Algebra Lineal FcamachoBoris JeampierreAún no hay calificaciones
- TensoresDocumento21 páginasTensoresPolanskyAún no hay calificaciones
- Resolución de Los Ejercicios 2 y 12 de La Práctica 1Documento4 páginasResolución de Los Ejercicios 2 y 12 de La Práctica 1Agustín PaceAún no hay calificaciones
- Algebra Lineal I PDFDocumento21 páginasAlgebra Lineal I PDFMaicol Martinez VenturaAún no hay calificaciones
- Teoria Euclides UsalDocumento38 páginasTeoria Euclides UsalHector Amo GómezAún no hay calificaciones
- Documento 1Documento16 páginasDocumento 1Maria Fernanda Meza TapiaAún no hay calificaciones
- Clase 8 ALGEBRADocumento19 páginasClase 8 ALGEBRAtesiscbaAún no hay calificaciones
- Cuerpos AlgebráicosDocumento18 páginasCuerpos Algebráicoslevilarraga123Aún no hay calificaciones
- 70 Bases y DimensionDocumento16 páginas70 Bases y Dimension32814295Aún no hay calificaciones
- Taller 2 Introducción Al Analisis RealDocumento8 páginasTaller 2 Introducción Al Analisis RealBrayan RomeroAún no hay calificaciones
- Clase 9: Cuerpos y Espacios Vectoriales.: 525140-S2-Álgebra IIDocumento19 páginasClase 9: Cuerpos y Espacios Vectoriales.: 525140-S2-Álgebra IICristoferLuisMamaniMarinoAún no hay calificaciones
- BorelLebesgue PDFDocumento18 páginasBorelLebesgue PDFmemfilmatAún no hay calificaciones
- Pauta Auxiliar 7Documento4 páginasPauta Auxiliar 7Jorge RodriguezAún no hay calificaciones
- Practico 1-Algebra2-2022Documento4 páginasPractico 1-Algebra2-2022Juan Andrés PérezAún no hay calificaciones
- Cap3 - EspaciosVectoriales 525150 5 2023 2 RevisadoDocumento24 páginasCap3 - EspaciosVectoriales 525150 5 2023 2 RevisadoantoniamacuadaAún no hay calificaciones
- Producto InteriorDocumento15 páginasProducto InteriorAlexis Eduardo Almendras ValdebenitoAún no hay calificaciones
- Apuntes As Lade (Algebra Lineal) Curso 2005-2006Documento45 páginasApuntes As Lade (Algebra Lineal) Curso 2005-2006Gabi Recinos Sandoval100% (1)
- Algebra, Illich Ramses Amado MendozaDocumento6 páginasAlgebra, Illich Ramses Amado MendozaIllich AmadoAún no hay calificaciones
- Dependencia LinealDocumento9 páginasDependencia LinealKonanAún no hay calificaciones
- GAL2-producto InternoDocumento46 páginasGAL2-producto InternoAndrea SubeldiaAún no hay calificaciones
- AED-Tema 4-Espacios VectorialesDocumento21 páginasAED-Tema 4-Espacios VectorialesAndrés Fdo RomeroAún no hay calificaciones
- Analisis Matematico en El Espacio Euclidiano PDFDocumento37 páginasAnalisis Matematico en El Espacio Euclidiano PDFRoberto Fiestas IzaguirreAún no hay calificaciones
- 05 Tema 04 09 10Documento13 páginas05 Tema 04 09 10Juan FloresAún no hay calificaciones
- Problemas Resueltos de Teorc3ada de ColasDocumento15 páginasProblemas Resueltos de Teorc3ada de ColasTeresa AguilarAún no hay calificaciones
- Unidad 4 PDFDocumento23 páginasUnidad 4 PDFAndrea Haro GonzalezAún no hay calificaciones
- Algebra LinealDocumento21 páginasAlgebra LinealRaul B. ReyesAún no hay calificaciones
- Ami Cap1 Cap4Documento192 páginasAmi Cap1 Cap4Jesus M Marquez SAún no hay calificaciones
- II DPnotesDocumento28 páginasII DPnotesfabricio nazarettoAún no hay calificaciones
- ESPACIOS VECTORIALES Álgebra LinealDocumento30 páginasESPACIOS VECTORIALES Álgebra LinealAmIn20122100% (1)
- Espacio S Vectorial EsDocumento12 páginasEspacio S Vectorial EsFrancisco SanchezAún no hay calificaciones
- Bases Matem Aticas para Modelos Estad Isticos Lineales: Guido Del Pino MDocumento13 páginasBases Matem Aticas para Modelos Estad Isticos Lineales: Guido Del Pino MCRISTIAN GARCIA BERMUDEZAún no hay calificaciones
- Tarea de Algebra Lineal Segunda VueltaDocumento9 páginasTarea de Algebra Lineal Segunda VueltabrendaAún no hay calificaciones
- Espacio VectorialDocumento4 páginasEspacio VectorialDerik DuynsteeAún no hay calificaciones
- Espacios VectorialesDocumento9 páginasEspacios VectorialesJoel HuillcaAún no hay calificaciones
- Clase Demostrativa PDFDocumento10 páginasClase Demostrativa PDFEduardo FernándezAún no hay calificaciones
- Algebra Lineal - DependenciaLineal 22Documento16 páginasAlgebra Lineal - DependenciaLineal 22uriel lopezAún no hay calificaciones
- Resumen Geometria y Algebra LinealDocumento9 páginasResumen Geometria y Algebra LinealNacho LimaAún no hay calificaciones
- Algebra Lineal Introducción Con EjemplosDocumento19 páginasAlgebra Lineal Introducción Con EjemplosAugusto Cesar García PazAún no hay calificaciones
- Boletin 1Documento3 páginasBoletin 1plato03corchetesAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- L1d 19 1Documento3 páginasL1d 19 1Francisco JavierAún no hay calificaciones
- L1a 16 3Documento3 páginasL1a 16 3Francisco JavierAún no hay calificaciones
- Evaluaci On1Documento1 páginaEvaluaci On1Francisco JavierAún no hay calificaciones
- Matrices PDFDocumento38 páginasMatrices PDFBryan IgnacioAún no hay calificaciones
- Agua en Mineria 2019 2020 VFDocumento25 páginasAgua en Mineria 2019 2020 VFFrancisco JavierAún no hay calificaciones
- Fluid Mechanics Munson 6th SolutionsDocumento1327 páginasFluid Mechanics Munson 6th SolutionsFrancisco JavierAún no hay calificaciones
- Neumología: Articulo CientíficoDocumento7 páginasNeumología: Articulo CientíficoJamileth ParedesAún no hay calificaciones
- Manual de Contabilidad para Las Empresas Del Sistema FinancieroDocumento12 páginasManual de Contabilidad para Las Empresas Del Sistema FinancieroKLEIDER-GAMERAún no hay calificaciones
- Charla Semiologia 2022Documento82 páginasCharla Semiologia 2022Analia LorensAún no hay calificaciones
- SeltecDocumento9 páginasSeltecWuilliam Danilo TorresAún no hay calificaciones
- Bautista Akane T4Documento4 páginasBautista Akane T4Akane Daniela Bautista BriseñoAún no hay calificaciones
- Proyecto Cafe Terminado EnmarcadoDocumento7 páginasProyecto Cafe Terminado EnmarcadoGaby OrdoñezAún no hay calificaciones
- Factor de CompresibilidadDocumento16 páginasFactor de Compresibilidadfrankbello1966100% (1)
- Ejercicios Notacion CientificaDocumento2 páginasEjercicios Notacion CientificaCorsary MarrugoAún no hay calificaciones
- Jaziel Flores Ortiz 5A ARH PDFDocumento31 páginasJaziel Flores Ortiz 5A ARH PDFJaziel OrtizAún no hay calificaciones
- FEPADEDocumento6 páginasFEPADEJocelin CortezAún no hay calificaciones
- Revista Viaje y AventuraDocumento12 páginasRevista Viaje y AventuraAaron AlonsoAún no hay calificaciones
- Guía de Práctica 08Documento9 páginasGuía de Práctica 08ANGIE GRACE VALENCIA GONZALESAún no hay calificaciones
- Resistividad, Resistencias, Potenciómetros, Varistores.Documento23 páginasResistividad, Resistencias, Potenciómetros, Varistores.juancaovandoAún no hay calificaciones
- Latifundio y MinifundioDocumento9 páginasLatifundio y MinifundioFredy Miranda0% (1)
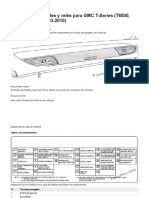
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones
- LET-113 Unidad III Material Básico de Lectura 2Documento8 páginasLET-113 Unidad III Material Básico de Lectura 2ErikaAún no hay calificaciones
- Los Cuantiles para Datos No Agrupados. - Matemática Serie 23Documento8 páginasLos Cuantiles para Datos No Agrupados. - Matemática Serie 23Brey OsorioAún no hay calificaciones
- Absorcion, y GsDocumento8 páginasAbsorcion, y GsAnonymous 1BNirFYAún no hay calificaciones
- Actividad de Aprendizaje 4 Analisis FinancieroDocumento10 páginasActividad de Aprendizaje 4 Analisis FinancieroKaren Cecilia Cabarcas LoraAún no hay calificaciones
- Cuello Parte IIDocumento52 páginasCuello Parte IIGABRIELA DE LEÓN MONZÓNAún no hay calificaciones
- Junin-CA-Depuracion de Las Aguas Del RioDocumento16 páginasJunin-CA-Depuracion de Las Aguas Del RioJorge Luis Rojas DiezAún no hay calificaciones
- Práctica de Campo 4Documento5 páginasPráctica de Campo 4América González SaucedoAún no hay calificaciones
- 4.6.5 Packet Tracer - Connect A Wired and Wireless Lan - Es XLDocumento4 páginas4.6.5 Packet Tracer - Connect A Wired and Wireless Lan - Es XLwilmernarvaezAún no hay calificaciones
- Flujograma Sobre La Evaluacion Del Examen Medico OcupacioanlDocumento12 páginasFlujograma Sobre La Evaluacion Del Examen Medico OcupacioanlyiselAún no hay calificaciones
- SIMULACRO 4 - Area CDocumento17 páginasSIMULACRO 4 - Area CQuindallAún no hay calificaciones
- Copia de Trabajo de Entrega Semana #5Documento23 páginasCopia de Trabajo de Entrega Semana #5Jesus DavidAún no hay calificaciones