También podría gustarte
- 2B-3 y 2B-4Documento6 páginas2B-3 y 2B-4REYNA DEL CARMEN GUTIERREZ GUTIERREZ100% (2)
- Segundo Trabajo de Ecuaciones DiferencialesDocumento5 páginasSegundo Trabajo de Ecuaciones DiferencialesDaniel SánchezAún no hay calificaciones
- Laboratorio 1Documento11 páginasLaboratorio 1Giovanni RozoAún no hay calificaciones
- Difusión en Una Película Líquida Descendent, Transferencia de Materia Por Convección ForzadaDocumento8 páginasDifusión en Una Película Líquida Descendent, Transferencia de Materia Por Convección ForzadaRogher Uluri Yana0% (1)
- Apuntes de AerodinamicaDocumento126 páginasApuntes de AerodinamicaManuel ContrerasAún no hay calificaciones
- Informe 2 FAQDocumento5 páginasInforme 2 FAQHector VillalobosAún no hay calificaciones
- 7 Casos de FactorizacionDocumento2 páginas7 Casos de FactorizacionErvin Acuña56% (16)
- Banco Preguntas Aplicaciones QuicesDocumento53 páginasBanco Preguntas Aplicaciones QuicesHector Villalobos100% (1)
- BancoEjerciciosRepaso - Parcial 1Documento6 páginasBancoEjerciciosRepaso - Parcial 1Juan Camilo Camacho100% (1)
- Dinamica Rotacional Practica 10Documento10 páginasDinamica Rotacional Practica 10Hector VillalobosAún no hay calificaciones
- Ejercicios Resueltos de Dinamica-VibracionesDocumento35 páginasEjercicios Resueltos de Dinamica-VibracionesYuri Abraham Paniagua Segovia77% (13)
- 10.B.2 Ejercicio (Bird)Documento4 páginas10.B.2 Ejercicio (Bird)Gabriela ZelayaAún no hay calificaciones
- A8 260421 HernandezruelasDocumento7 páginasA8 260421 HernandezruelasLitzy HernandezAún no hay calificaciones
- Balances de MomentumDocumento31 páginasBalances de MomentumDaniel LiraAún no hay calificaciones
- ETSDocumento3 páginasETSKarla Contreras GómezAún no hay calificaciones
- Pauta Control 1 MAT-024Documento3 páginasPauta Control 1 MAT-024fefahernandezzzAún no hay calificaciones
- PES - Cálculo Avanzado (2010-2)Documento5 páginasPES - Cálculo Avanzado (2010-2)Camila Retamal ValenzuelaAún no hay calificaciones
- Tareas de Variable IIDocumento6 páginasTareas de Variable IIAngel David Pérez HérnandezAún no hay calificaciones
- 2do Parcial Analisis Matematico 1Documento2 páginas2do Parcial Analisis Matematico 1camy.mesa66Aún no hay calificaciones
- Ecuaciones 3 EjeDocumento4 páginasEcuaciones 3 Ejekqzvy49q6vAún no hay calificaciones
- CalculoDocumento9 páginasCalculoDavid Crz MtAún no hay calificaciones
- Div F: Matemáticas Teorema de La Divergencia Ejercicios ResueltosDocumento9 páginasDiv F: Matemáticas Teorema de La Divergencia Ejercicios ResueltosDavid Crz MtAún no hay calificaciones
- Programación CUADRATICADocumento7 páginasProgramación CUADRATICAEd Reyes “Loxar”Aún no hay calificaciones
- Guía 3-Integración Por PartesDocumento5 páginasGuía 3-Integración Por PartesPaulo VanegasAún no hay calificaciones
- MF EstaticaDocumento10 páginasMF EstaticaJUAN DAVID ORTIZ RIVERAAún no hay calificaciones
- Cuadernillo Matemáticas-13-15Documento3 páginasCuadernillo Matemáticas-13-15Forkan XAún no hay calificaciones
- Ecuaciones 3Documento6 páginasEcuaciones 3mpaez43Aún no hay calificaciones
- Formulario FisicaDocumento4 páginasFormulario Fisicaa374284Aún no hay calificaciones
- Fase 4 ClaculoDocumento6 páginasFase 4 Claculojairo eduardo torres guzmanAún no hay calificaciones
- Sol Taller 25Documento2 páginasSol Taller 25Jhon Daniel Mina SánchezAún no hay calificaciones
- Movimiento ParabolicoDocumento9 páginasMovimiento ParabolicoDaphne JH MalikAún no hay calificaciones
- Ejercicios Teorema de GreenDocumento6 páginasEjercicios Teorema de GreenEssmeray ContrerasAún no hay calificaciones
- Pauta Ayudantia 3e MAT024 2022-02Documento4 páginasPauta Ayudantia 3e MAT024 2022-02Gabriel Retamal 4BAún no hay calificaciones
- Sistemas DinámicosDocumento9 páginasSistemas DinámicosOmar Fernando Granados VergaraAún no hay calificaciones
- Examen Parcial EE410-ODocumento3 páginasExamen Parcial EE410-OSleepy PianistAún no hay calificaciones
- Cambio de Ordenes de IntegracionDocumento15 páginasCambio de Ordenes de IntegracionJose Emerith Guillen HernandezAún no hay calificaciones
- Clase - 2021 07 08 - C4 S9Documento9 páginasClase - 2021 07 08 - C4 S9David BuñayAún no hay calificaciones
- Ejercicios de FluidosDocumento5 páginasEjercicios de FluidosAlvaro José Lopez CuetoAún no hay calificaciones
- Pauta Prueba FinalDocumento11 páginasPauta Prueba FinalPepe NachoDAún no hay calificaciones
- Parcial Resuelto (27-4-22)Documento10 páginasParcial Resuelto (27-4-22)jonatan vitalAún no hay calificaciones
- Ecuaciones Diferenciales ExactasDocumento5 páginasEcuaciones Diferenciales Exactasclic2141002Aún no hay calificaciones
- Tema 5Documento6 páginasTema 5haquilesAún no hay calificaciones
- Avaces Tarea 3Documento7 páginasAvaces Tarea 3yesica lorena parrarojasAún no hay calificaciones
- (CalcVarVbles) Clase 28Documento6 páginas(CalcVarVbles) Clase 28Oscar FlorezAún no hay calificaciones
- 3ra PRACTICA DIRIGIDA MATEMATICA III (MA-133)Documento33 páginas3ra PRACTICA DIRIGIDA MATEMATICA III (MA-133)Martin AlonsoAún no hay calificaciones
- Elasticidad y PlasticidadDocumento11 páginasElasticidad y PlasticidadAgustin BorriAún no hay calificaciones
- Metodo de IntegracionDocumento8 páginasMetodo de IntegracionLuis Jorge Apaza CallizayaAún no hay calificaciones
- Taller Zulima MultivariadoDocumento19 páginasTaller Zulima MultivariadojonathanAún no hay calificaciones
- Trabajo Aplicativo-MmcDocumento8 páginasTrabajo Aplicativo-MmcMiguel Primo SalisAún no hay calificaciones
- Problema 1Documento10 páginasProblema 1Damayrí SalinasAún no hay calificaciones
- Resolución de Problemas N°11Documento6 páginasResolución de Problemas N°11Lix Shirley Tafur FigueroaAún no hay calificaciones
- Metodo de Integracion Por PartesDocumento27 páginasMetodo de Integracion Por PartesManuel ArevaloAún no hay calificaciones
- Ecuaciones DiferencialesDocumento10 páginasEcuaciones DiferencialesNicolas MartinezAún no hay calificaciones
- Trabajo Terminado EstaticaDocumento13 páginasTrabajo Terminado EstaticaMariaJose FernandezAún no hay calificaciones
- 1-4 Verifique Que El Teorema de La Divergencia Es Cierto para El Campo Vectorial F en La Región E. 1Documento20 páginas1-4 Verifique Que El Teorema de La Divergencia Es Cierto para El Campo Vectorial F en La Región E. 1sebastian.avilamAún no hay calificaciones
- Metodos NumericosDocumento2 páginasMetodos NumericosQrogas JmeaAún no hay calificaciones
- 1 Balance de Mom SNCDocumento14 páginas1 Balance de Mom SNCJorge Amaro CortesAún no hay calificaciones
- Von KarmanDocumento9 páginasVon KarmanJefferson Fabian Ylma CajusolAún no hay calificaciones
- Capa Limite HidrodinamicaDocumento5 páginasCapa Limite HidrodinamicaCinthia BautistaAún no hay calificaciones
- Tabla de IntegralesDocumento5 páginasTabla de Integralesjosefer100% (16)
- Tabla de IntegralesDocumento5 páginasTabla de Integralesapi-26274418Aún no hay calificaciones
- Tabla de Integrales PDFDocumento5 páginasTabla de Integrales PDFDenisse Cedeño IturraldeAún no hay calificaciones
- Es 2021 1 CMV SolucionarioDocumento4 páginasEs 2021 1 CMV SolucionarioJULIO CESAR CABRERA CHAVEZAún no hay calificaciones
- 35 Tarea 4Documento32 páginas35 Tarea 4cesarAún no hay calificaciones
- Solucionario Tarea 1Documento21 páginasSolucionario Tarea 1Eric RiverosAún no hay calificaciones
- Informe Proyecto FinalDocumento8 páginasInforme Proyecto FinalHector VillalobosAún no hay calificaciones
- Parcial 1Documento3 páginasParcial 1Hector VillalobosAún no hay calificaciones
- Texto ArgumentativoDocumento4 páginasTexto ArgumentativoHector VillalobosAún no hay calificaciones
- Afectaciones Climaticas Sector Ganadero 2022Documento46 páginasAfectaciones Climaticas Sector Ganadero 2022Hector VillalobosAún no hay calificaciones
- Ejercicio 01Documento2 páginasEjercicio 01Hector VillalobosAún no hay calificaciones
- Soporte Parcial 3Documento5 páginasSoporte Parcial 3Hector VillalobosAún no hay calificaciones
- Ejercicios de PrácticaDocumento4 páginasEjercicios de PrácticaHector VillalobosAún no hay calificaciones
- Proyecto EcologíaDocumento1 páginaProyecto EcologíaHector VillalobosAún no hay calificaciones
- Reto 6 BiologiaDocumento3 páginasReto 6 BiologiaHector VillalobosAún no hay calificaciones
- PFD Distillate de NaranjaDocumento1 páginaPFD Distillate de NaranjaHector VillalobosAún no hay calificaciones
- Taller Cargas CoulombDocumento7 páginasTaller Cargas CoulombHector VillalobosAún no hay calificaciones
- Reseña Isaac AsimovDocumento3 páginasReseña Isaac AsimovHector VillalobosAún no hay calificaciones
- Exp5 - Gas IdealDocumento9 páginasExp5 - Gas IdealHector VillalobosAún no hay calificaciones
- DocumentoFinal G7Documento9 páginasDocumentoFinal G7Hector VillalobosAún no hay calificaciones
- Student Response - Pivot InteractivesDocumento7 páginasStudent Response - Pivot InteractivesHector VillalobosAún no hay calificaciones
- Exp5 - Gas IdealDocumento9 páginasExp5 - Gas IdealHector VillalobosAún no hay calificaciones
- Exp5 - Gas IdealDocumento9 páginasExp5 - Gas IdealHector VillalobosAún no hay calificaciones
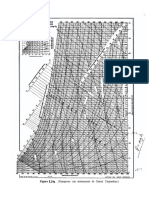
- Carta PsicrométricaDocumento1 páginaCarta PsicrométricaHector VillalobosAún no hay calificaciones
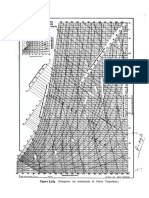
- Carta PsicrométricaDocumento1 páginaCarta PsicrométricaHector VillalobosAún no hay calificaciones
- Carta PsicrométricaDocumento1 páginaCarta PsicrométricaHector VillalobosAún no hay calificaciones
- Ensayo SostenibilidadDocumento4 páginasEnsayo SostenibilidadHector VillalobosAún no hay calificaciones
- BancoEjerciciosRepaso - Parcial 1Documento6 páginasBancoEjerciciosRepaso - Parcial 1Hector VillalobosAún no hay calificaciones
- Tratado de Las Justas CausasDocumento6 páginasTratado de Las Justas CausasHector VillalobosAún no hay calificaciones
- Taller 4 PDFDocumento9 páginasTaller 4 PDFHector VillalobosAún no hay calificaciones
- Ejercicios 2 (VariDocumento52 páginasEjercicios 2 (VariJorge Daniel HernandezAún no hay calificaciones
- 6.1 Transformada de LaplaceDocumento20 páginas6.1 Transformada de LaplacePaz Fernanda Parraguez GutierrezAún no hay calificaciones
- TADcurvasDocumento57 páginasTADcurvaschemudoAún no hay calificaciones
- Gomez Israel AplicacionesDocumento5 páginasGomez Israel Aplicacionesfede larAún no hay calificaciones
- ProbabilidadesDocumento57 páginasProbabilidadesALVARO FLORES KLUSSMANNAún no hay calificaciones
- B1 Matematicas I Con Cambios de Diseño RevisadoDocumento51 páginasB1 Matematicas I Con Cambios de Diseño RevisadoSergio RodriguezAún no hay calificaciones
- Seminario de Matemática AplicadaDocumento47 páginasSeminario de Matemática AplicadaBrenda Raquel Rafael VillalobosAún no hay calificaciones
- Tema 1 Introducción A La Econometría PDFDocumento6 páginasTema 1 Introducción A La Econometría PDFFelix OrdazAún no hay calificaciones
- APUNTES FactorizaciónDocumento11 páginasAPUNTES FactorizaciónIGFRAN30Aún no hay calificaciones
- Taller Semana 7Documento2 páginasTaller Semana 7JosephRojasAún no hay calificaciones
- Laplaciano en Coordenadas PolaresDocumento12 páginasLaplaciano en Coordenadas PolaresEstefy Erreyes100% (1)
- M9 - PL12.indd 177 5/21/13 6:02 PMDocumento97 páginasM9 - PL12.indd 177 5/21/13 6:02 PMJaime HuisaAún no hay calificaciones
- Aprendo en Casa 7 Al 10 de JulioDocumento5 páginasAprendo en Casa 7 Al 10 de JulioLaRepublica DigitalAún no hay calificaciones
- Tasas RelacionadasDocumento15 páginasTasas Relacionadasyes c.Aún no hay calificaciones
- Ejercicios Detallados Del Obj 1 Mat I (175-176-177Documento11 páginasEjercicios Detallados Del Obj 1 Mat I (175-176-177aguilar02021Aún no hay calificaciones
- Ajuste Potencial y El Mínimo de CuadradosDocumento3 páginasAjuste Potencial y El Mínimo de CuadradosFabricio AlvarezAún no hay calificaciones
- Consolidado Primero Bgu-Proyecto 3Documento19 páginasConsolidado Primero Bgu-Proyecto 3Criss MelendresAún no hay calificaciones
- NUEVO SILABO Calculo Aplicado A La Física IDocumento12 páginasNUEVO SILABO Calculo Aplicado A La Física ITomtt CornacAún no hay calificaciones
- RESOLUCION DE LAS LITA 02 PythonDocumento10 páginasRESOLUCION DE LAS LITA 02 PythonjuberAún no hay calificaciones
- Exponent eDocumento5 páginasExponent ejose luis pachecoAún no hay calificaciones
- Matematica5 Semana 12 Guia de Estudio Ecuacion Cuadratica II Ccesa007Documento2 páginasMatematica5 Semana 12 Guia de Estudio Ecuacion Cuadratica II Ccesa007Demetrio Ccesa RaymeAún no hay calificaciones
- MAT - U6 - 3er Grado - Sesion 13Documento6 páginasMAT - U6 - 3er Grado - Sesion 13Roger Pumahualcca HuarcayaAún no hay calificaciones
- Solución de Un Sistema de Tres Ecuaciones Con Tres IncógnitasDocumento8 páginasSolución de Un Sistema de Tres Ecuaciones Con Tres IncógnitasJohn ConnorAún no hay calificaciones
- Tarea 3 - Planificar Métodos y Herramientas para El Diseño de Filtros DigitalesDocumento16 páginasTarea 3 - Planificar Métodos y Herramientas para El Diseño de Filtros DigitalesLaura ValentinaAún no hay calificaciones
- Guia Segundo Basico, Matematica, 2021Documento18 páginasGuia Segundo Basico, Matematica, 2021RudyAún no hay calificaciones
- Mod Mat Dolly3Documento208 páginasMod Mat Dolly3Diego NisperuzaAún no hay calificaciones
- Compendio Ejercicios Ecuaciones Chapman KolgomorovDocumento14 páginasCompendio Ejercicios Ecuaciones Chapman KolgomorovJahir050Aún no hay calificaciones
- Lectura Identidades y Ecuaciones TrigonomtricasDocumento19 páginasLectura Identidades y Ecuaciones TrigonomtricasPablo RamosAún no hay calificaciones
- Dossier Geometria Analitica PDFDocumento19 páginasDossier Geometria Analitica PDFStellaAldana100% (1)