También podría gustarte
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Problemas de ControlDocumento44 páginasProblemas de ControlLuigi Portugal0% (2)
- Resonancia mecánicaDocumento6 páginasResonancia mecánicajose peñateAún no hay calificaciones
- EJERCITARIO III CalculoDocumento3 páginasEJERCITARIO III CalculoCesar GomezAún no hay calificaciones
- Problema 3Documento10 páginasProblema 3Tomas Antonio LazzoAún no hay calificaciones
- Identificación modal de edificios con vibraciones ambientalesDocumento15 páginasIdentificación modal de edificios con vibraciones ambientalesJose Rafael GarciaAún no hay calificaciones
- Milton Rodriguez - Fase 3Documento11 páginasMilton Rodriguez - Fase 3Diego CarranzaAún no hay calificaciones
- Etapa 2 - Grupo 243005 - 20 - V2Documento19 páginasEtapa 2 - Grupo 243005 - 20 - V2jennifer molinaAún no hay calificaciones
- EDO - IntroducciónDocumento12 páginasEDO - IntroducciónFelipe PerezAún no hay calificaciones
- Proyecto Motor DCDocumento9 páginasProyecto Motor DCWilliam Steven Triana GarciaAún no hay calificaciones
- Clase 05.3 Modelado Matematico de Sistemas Mecanicos de RotacionDocumento10 páginasClase 05.3 Modelado Matematico de Sistemas Mecanicos de RotacionROD STEVEN CARRASCO BENAVENTEAún no hay calificaciones
- Laboratorio2 - MT227 - 2020Documento8 páginasLaboratorio2 - MT227 - 2020MB Legends100% (1)
- Aportes Grupo 203040 20Documento14 páginasAportes Grupo 203040 20Jaime Adonis Duran RoperoAún no hay calificaciones
- Trabajo 1 FenoemnosDocumento12 páginasTrabajo 1 FenoemnosOrlando Velasquez HernandezAún no hay calificaciones
- EcualizacionDocumento32 páginasEcualizacionJosé Luis Duque Castro100% (1)
- 2 - Vibraciones Mecanicas 1 GDL - TeoriaDocumento10 páginas2 - Vibraciones Mecanicas 1 GDL - TeoriatxabiAún no hay calificaciones
- Problemas de ControlDocumento43 páginasProblemas de ControlLuigi PortugalAún no hay calificaciones
- Vibraciones MecanicasDocumento12 páginasVibraciones MecanicasGabriel MendezAún no hay calificaciones
- Defectos en Estructuras CristalinasDocumento31 páginasDefectos en Estructuras CristalinasCayoja Anabe LeoAún no hay calificaciones
- Resumen SistemasDocumento74 páginasResumen Sistemasjose.bailen03Aún no hay calificaciones
- Trabajo Teoría Parte ADocumento9 páginasTrabajo Teoría Parte ANefasto -Aún no hay calificaciones
- Vibraciones Mecánicas CRD11 AisDocumento31 páginasVibraciones Mecánicas CRD11 AisDariel GomezAún no hay calificaciones
- 02 Estado Elastico (Seccion No Agrietada)Documento18 páginas02 Estado Elastico (Seccion No Agrietada)linet yhemiley condori quispayaAún no hay calificaciones
- DeflexionesDocumento4 páginasDeflexionesAlexander Mirano MasAún no hay calificaciones
- Analogias Electricas PDFDocumento14 páginasAnalogias Electricas PDFFlor Barcia VeraAún no hay calificaciones
- Tarea - 4 - Jhon AlexanderDocumento16 páginasTarea - 4 - Jhon Alexanderjhon alexander yasno saenzAún no hay calificaciones
- DiijdeDocumento5 páginasDiijdeRamses RodriguezAún no hay calificaciones
- Cinética de una partícula: Segunda Ley de NewtonDocumento42 páginasCinética de una partícula: Segunda Ley de NewtonMaicol GarcíaAún no hay calificaciones
- Modelamiento en espacio de estados y funciones de transferenciaDocumento7 páginasModelamiento en espacio de estados y funciones de transferenciaLeonardo Bolivar VillegasAún no hay calificaciones
- INFORME 2 Y 3 - Sensores - y - ActuadoresDocumento11 páginasINFORME 2 Y 3 - Sensores - y - ActuadoresJesus Gallardo RamirezAún no hay calificaciones
- Trabajo Automatización de Sistemas IndustrialesDocumento5 páginasTrabajo Automatización de Sistemas Industrialesjorge ossaAún no hay calificaciones
- Grupo - 243005 - 2 Fase 2Documento35 páginasGrupo - 243005 - 2 Fase 2Hector Fabian Duque Barco50% (2)
- Sistemas de dos grados de libertadDocumento43 páginasSistemas de dos grados de libertadMaRy GeAún no hay calificaciones
- FBTFI02 Taller2D Oscilaciones 1415-2Documento2 páginasFBTFI02 Taller2D Oscilaciones 1415-2Christopher CervantesAún no hay calificaciones
- Clase 7 de Vibraciones Mecanicas 2023 IIDocumento6 páginasClase 7 de Vibraciones Mecanicas 2023 IIALCIDES LUIS FABIAN BRA�EZAún no hay calificaciones
- DINAMICA DE ESTRUCTURAS - PPTX 1Documento54 páginasDINAMICA DE ESTRUCTURAS - PPTX 1Maynor Orestes Torres EspinozaAún no hay calificaciones
- Laboratorio N°2 - Fisica Ii 2022-IDocumento4 páginasLaboratorio N°2 - Fisica Ii 2022-IJosue Eliezer Alata ReyAún no hay calificaciones
- Practica 01-Control Digital-2020bDocumento1 páginaPractica 01-Control Digital-2020bFabián MoralesAún no hay calificaciones
- Preguntas Teoricas de Matematicas Avanzada..Documento15 páginasPreguntas Teoricas de Matematicas Avanzada..AbrahamRenteriaAún no hay calificaciones
- Informe Sistemas Dinámicos Control Segundo - DiegoDocumento11 páginasInforme Sistemas Dinámicos Control Segundo - DiegoAlejandro RiveraAún no hay calificaciones
- Laboratorio 2 de AutomatizaciónDocumento21 páginasLaboratorio 2 de AutomatizaciónDavid Damian GutierrezAún no hay calificaciones
- EX03Documento4 páginasEX03OMARAún no hay calificaciones
- Termodinámica Aplicada A La Ingeniería Ambiental 03Documento58 páginasTermodinámica Aplicada A La Ingeniería Ambiental 03FERNANDEZ SALDAÑA CELIA OLGAAún no hay calificaciones
- Ingeniería Mecánica: Análisis de Esfuerzos en Diafragma CircularDocumento11 páginasIngeniería Mecánica: Análisis de Esfuerzos en Diafragma CircularFernando HaroAún no hay calificaciones
- 3.5.1 Ecuación de Onda de La CuerdaDocumento13 páginas3.5.1 Ecuación de Onda de La CuerdaOmar Mendez LopezAún no hay calificaciones
- Formulario Dinamica EstructuralDocumento2 páginasFormulario Dinamica Estructuralhiuopli100% (1)
- HolaDocumento5 páginasHolaMr gearAún no hay calificaciones
- Modelo Espacio EstadosDocumento2 páginasModelo Espacio EstadosFreddy GarciaAún no hay calificaciones
- Resortes Acoplados 6-05Documento9 páginasResortes Acoplados 6-05Omar VillarrealAún no hay calificaciones
- OscilacionesDocumento26 páginasOscilacionesMathias PJAún no hay calificaciones
- Informe Sistemas Dinámicos Control Tercero - DiegoDocumento12 páginasInforme Sistemas Dinámicos Control Tercero - DiegoAlejandro RiveraAún no hay calificaciones
- Ejemplos de Modelado de Sistemas Continuos - 33pDocumento33 páginasEjemplos de Modelado de Sistemas Continuos - 33pAldo2686Aún no hay calificaciones
- Control Moderno Practica 4 14-1 Fim UniDocumento6 páginasControl Moderno Practica 4 14-1 Fim UniJordy CanalesAún no hay calificaciones
- Modelado y simulación de sistemas de control mediante SimulinkDocumento10 páginasModelado y simulación de sistemas de control mediante Simulinkcarolina abigail jimenez cortezAún no hay calificaciones
- Laboratorio 3 - OscilacionesDocumento8 páginasLaboratorio 3 - OscilacionesFranco Campos LujanAún no hay calificaciones
- Apuntes Tema 5 Al 020621Documento14 páginasApuntes Tema 5 Al 020621MONTOYA ORTIZ AZAEL INGENIER�A CIVILAún no hay calificaciones
- 1 Grado de LibertadDocumento3 páginas1 Grado de LibertadTury MillanAún no hay calificaciones
- Lab3 Simulink 2Documento7 páginasLab3 Simulink 2juan c. condori ch.Aún no hay calificaciones
- Resoluciones Matemáticas Ramsey y RBCDocumento6 páginasResoluciones Matemáticas Ramsey y RBCUcraniaAún no hay calificaciones
- CL24 084 DRW Ci Sacyr 015 - 2Documento1 páginaCL24 084 DRW Ci Sacyr 015 - 2Pablo Ignacio Jaque MuñozAún no hay calificaciones
- P69 Ap-Inf Final-R F 20230306-Lam 3Documento1 páginaP69 Ap-Inf Final-R F 20230306-Lam 3Pablo Ignacio Jaque MuñozAún no hay calificaciones
- Registro de Consultores AraDocumento2 páginasRegistro de Consultores AraPablo Ignacio Jaque MuñozAún no hay calificaciones
- Comprobante de pago Chevrolet SF por $579.827Documento1 páginaComprobante de pago Chevrolet SF por $579.827rdmoenenAún no hay calificaciones
- Ata Agosto 2020Documento2 páginasAta Agosto 2020Pablo Ignacio Jaque MuñozAún no hay calificaciones
- CL24 083 Cal Ci Sacyr 008 - 0Documento21 páginasCL24 083 Cal Ci Sacyr 008 - 0Pablo Ignacio Jaque MuñozAún no hay calificaciones
- Calendario Semanal 2023Documento4 páginasCalendario Semanal 2023Pablo Ignacio Jaque MuñozAún no hay calificaciones
- OrganigramaDocumento1 páginaOrganigramaPablo Ignacio Jaque MuñozAún no hay calificaciones
- CL24 083 Cal Ci Sacyr 013 - BDocumento20 páginasCL24 083 Cal Ci Sacyr 013 - BPablo Ignacio Jaque MuñozAún no hay calificaciones
- Perfiles Icha SelectosDocumento77 páginasPerfiles Icha SelectosChristian GonzálezAún no hay calificaciones
- DVA 2012-056 Mecánica de Suelos Consistorial V. AlemanaDocumento29 páginasDVA 2012-056 Mecánica de Suelos Consistorial V. AlemanaPablo Ignacio Jaque MuñozAún no hay calificaciones
- Memoria Calculo Casa Cuartelero Belloto 17 Agosto 2015Documento14 páginasMemoria Calculo Casa Cuartelero Belloto 17 Agosto 2015Pablo Ignacio Jaque MuñozAún no hay calificaciones
- H335250 32640 15 125 0005Documento21 páginasH335250 32640 15 125 0005Pablo Ignacio Jaque MuñozAún no hay calificaciones
- Hatch: Minera Escondida Ltda. Laguna Seca Tailings Strategy (LSTS) Estudio de Ingenieria - Fase SDPDocumento19 páginasHatch: Minera Escondida Ltda. Laguna Seca Tailings Strategy (LSTS) Estudio de Ingenieria - Fase SDPPablo Ignacio Jaque MuñozAún no hay calificaciones
- Res 1018 23.08.2022 Aprueba BasesDocumento42 páginasRes 1018 23.08.2022 Aprueba BasesPablo Ignacio Jaque MuñozAún no hay calificaciones
- CL24 083 Cal Ci Sacyr 009 - 2Documento37 páginasCL24 083 Cal Ci Sacyr 009 - 2Pablo Ignacio Jaque MuñozAún no hay calificaciones
- Informe Puntos SERVIU 2021 JAFDocumento7 páginasInforme Puntos SERVIU 2021 JAFPablo Ignacio Jaque MuñozAún no hay calificaciones
- Dto 236 - 23 May 1926 PDFDocumento10 páginasDto 236 - 23 May 1926 PDFchplazaAún no hay calificaciones
- Camara de GrasaDocumento32 páginasCamara de GrasaRicardo Roronoa83% (6)
- Estudio 'Soñadores RojinegrosDocumento28 páginasEstudio 'Soñadores RojinegrosPablo Ignacio Jaque MuñozAún no hay calificaciones
- Tipos de Marcos Resistentes OMF, IMF, SMFDocumento22 páginasTipos de Marcos Resistentes OMF, IMF, SMFJose García Herrero100% (4)
- Memoria Reginald AlvaradoDocumento168 páginasMemoria Reginald AlvaradoPablo Ignacio Jaque MuñozAún no hay calificaciones
- 202008ES - Condominio MaipuDocumento3 páginas202008ES - Condominio MaipuPablo Ignacio Jaque MuñozAún no hay calificaciones
- BASE LOTEO DIEGO - GeorrefenciadoDocumento1 páginaBASE LOTEO DIEGO - GeorrefenciadoPablo Ignacio Jaque MuñozAún no hay calificaciones
- Oficio 413-1994 - Exigencias A Los Sistemas de CloracionDocumento10 páginasOficio 413-1994 - Exigencias A Los Sistemas de Cloracionfranklinj87Aún no hay calificaciones
- Planificación Herramientas de Google SuiteDocumento2 páginasPlanificación Herramientas de Google SuitePablo Ignacio Jaque MuñozAún no hay calificaciones
- NCH 1515 OF1979 Mecánica de Suelos - Determinación de La HumedadDocumento7 páginasNCH 1515 OF1979 Mecánica de Suelos - Determinación de La Humedaddantedote100% (1)
- D609 Regulación de Contaminantes Asociados A Las Descargas de Residuos Industriales Líquidos A Sistemas de AlcantarilladoDocumento15 páginasD609 Regulación de Contaminantes Asociados A Las Descargas de Residuos Industriales Líquidos A Sistemas de AlcantarilladoPablo Ignacio Jaque MuñozAún no hay calificaciones
- InstruccionesDocumento4 páginasInstruccionesPablo Ignacio Jaque MuñozAún no hay calificaciones
- Resumen de Las PaginasDocumento8 páginasResumen de Las PaginasROdrigo QuirozAún no hay calificaciones
- Analisis Matematico Unidad 1/ EntornosDocumento22 páginasAnalisis Matematico Unidad 1/ EntornosLucianoAún no hay calificaciones
- Guia Final Mat. II - 2019Documento13 páginasGuia Final Mat. II - 2019elpipeHDAún no hay calificaciones
- Ejercicio 3 Carlos SalamancaDocumento4 páginasEjercicio 3 Carlos SalamancaMarcelo Tanimuca100% (1)
- 3 Present MatricesElemen y RamgoDocumento21 páginas3 Present MatricesElemen y RamgoDimitri NovoaAún no hay calificaciones
- Solucion Potencias y RaicesDocumento3 páginasSolucion Potencias y Raiceskamichii100% (1)
- Ejercicios de Numeros Racionales para Quinto de PrimariaDocumento5 páginasEjercicios de Numeros Racionales para Quinto de PrimariaFabian ChillógalloAún no hay calificaciones
- Estructuras algebraicas y sus propiedadesDocumento9 páginasEstructuras algebraicas y sus propiedadessergiool gamerAún no hay calificaciones
- 3 Veintena DefinitivaDocumento4 páginas3 Veintena DefinitivaAngel Alberto ACOSTA RUIZAún no hay calificaciones
- 20 Transfor Geometricas Homologia AfinidadDocumento7 páginas20 Transfor Geometricas Homologia AfinidaddarkanthonyAún no hay calificaciones
- TEMA 1 Parte 1Documento32 páginasTEMA 1 Parte 1YossAún no hay calificaciones
- Diedros .TriedrosDocumento5 páginasDiedros .TriedrosANTONY BERTELLO OJEDAAún no hay calificaciones
- Método Jacobi para resolver sistemas de ecuaciones lineales en MatlabDocumento4 páginasMétodo Jacobi para resolver sistemas de ecuaciones lineales en MatlabMarlon Maldonado AguirreAún no hay calificaciones
- Tarea3 - Grupo 52Documento44 páginasTarea3 - Grupo 52Andres Fernando Guevara GomezAún no hay calificaciones
- Temas para Economía OptimizacionDocumento189 páginasTemas para Economía OptimizacionJuanPabloRodriguezCardonaAún no hay calificaciones
- Áreas circulares y longitud de circunferenciasDocumento7 páginasÁreas circulares y longitud de circunferenciasLos3 Pullipop TrollsAún no hay calificaciones
- Suma y Resta de Números Complejos en Su Forma PolarDocumento3 páginasSuma y Resta de Números Complejos en Su Forma PolarLulu Gp71% (7)
- Probabilidades DeberDocumento7 páginasProbabilidades DeberYANELA MAYLIN MAYORGA NU�EZAún no hay calificaciones
- Métodos Numéricos Colab 2Documento6 páginasMétodos Numéricos Colab 2jofer666Aún no hay calificaciones
- Tarea Numero 7 MateDocumento11 páginasTarea Numero 7 MateMIGUEL100% (1)
- Operadores Inversos Ecuaciones DiferencialesDocumento10 páginasOperadores Inversos Ecuaciones DiferencialesWalter Walter Huaman QuillahuamanAún no hay calificaciones
- Teoría - Unidad 1Documento38 páginasTeoría - Unidad 1Fed3ssjAún no hay calificaciones
- Algebra Anual Uni 2015Documento18 páginasAlgebra Anual Uni 2015Augusto Tokumoto Vital100% (3)
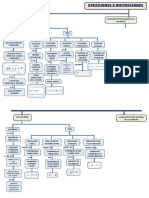
- Ecuaciones e InecuacionesDocumento2 páginasEcuaciones e InecuacionesTamara Rosales Tandaipan100% (2)
- Métodos de resolución del flujo gradualmente variado en canalesDocumento8 páginasMétodos de resolución del flujo gradualmente variado en canalesMilton PantojaAún no hay calificaciones
- Desigualdad de CauchyDocumento3 páginasDesigualdad de CauchyErwin Chavez FloresAún no hay calificaciones
- Multiplicación de Números EnterosDocumento13 páginasMultiplicación de Números EnterosBonilla Omar OscarAún no hay calificaciones
- Algebra TrigonometriaDocumento9 páginasAlgebra Trigonometriajorge calderonAún no hay calificaciones
- Examen numéricos 70/70Documento3 páginasExamen numéricos 70/70Yoha TorresAún no hay calificaciones