100% encontró este documento útil (1 voto)
91 vistas7 páginasSimulación de Sistemas Dinámicos en Simulink
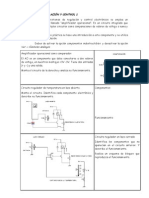
Este documento presenta un laboratorio sobre simulación de sistemas dinámicos usando Simulink. Explica objetivos, material necesario, conceptos teóricos y cinco ejercicios prácticos para modelar y simular diferentes sistemas de primer y segundo orden.
Cargado por
juan c. condori ch.Derechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd
100% encontró este documento útil (1 voto)
91 vistas7 páginasSimulación de Sistemas Dinámicos en Simulink
Este documento presenta un laboratorio sobre simulación de sistemas dinámicos usando Simulink. Explica objetivos, material necesario, conceptos teóricos y cinco ejercicios prácticos para modelar y simular diferentes sistemas de primer y segundo orden.
Cargado por
juan c. condori ch.Derechos de autor
© © All Rights Reserved
Nos tomamos en serio los derechos de los contenidos. Si sospechas que se trata de tu contenido, reclámalo aquí.
Formatos disponibles
Descarga como PDF, TXT o lee en línea desde Scribd