También podría gustarte
- Internet Del DineroDocumento208 páginasInternet Del Dinerofcruzescobar100% (4)
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalCalificación: 5 de 5 estrellas5/5 (4)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosDe EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosCalificación: 5 de 5 estrellas5/5 (5)
- Paper Robot MinisumoDocumento11 páginasPaper Robot MinisumoWilliam SolarteAún no hay calificaciones
- 1000 Ideas de Negocios EbookDocumento304 páginas1000 Ideas de Negocios EbookSweethy Arte100% (1)
- Informe Brazo RoboticoDocumento27 páginasInforme Brazo RoboticoArthur Morales Dionicio0% (1)
- Proyecto Robot SumoDocumento6 páginasProyecto Robot SumoMichelle ghostAún no hay calificaciones
- Proyecto Seguidor de LíneaDocumento21 páginasProyecto Seguidor de LíneaEdwin RodriguezAún no hay calificaciones
- Proyecto Final Mini SumoDocumento10 páginasProyecto Final Mini SumoGilberto SilvaAún no hay calificaciones
- Informe Seguidor de LineaDocumento12 páginasInforme Seguidor de LineaVinicio TenorioAún no hay calificaciones
- Seguidor de LineaDocumento16 páginasSeguidor de Linea'edgaar MoraleesAún no hay calificaciones
- S5 - Mapa de Presencia E-Commerce - EliabRojasFloresDocumento5 páginasS5 - Mapa de Presencia E-Commerce - EliabRojasFloresNathan RFAún no hay calificaciones
- Sistema de CanalesDocumento475 páginasSistema de CanalesVictorianolopez100% (1)
- Protocolo Brazo RobotDocumento22 páginasProtocolo Brazo RobotJose Luis EsquivelAún no hay calificaciones
- Refrigeración y Congelación de AlimentoDocumento121 páginasRefrigeración y Congelación de AlimentoCarlos RicharAún no hay calificaciones
- Calculo de Bomba y Tanques Vivienda MultifamiliarDocumento17 páginasCalculo de Bomba y Tanques Vivienda MultifamiliarPaoloTaboadaOreAún no hay calificaciones
- Producto o Praxis Del Curriculum GrundyDocumento280 páginasProducto o Praxis Del Curriculum GrundyJulian Andres Cardenas Cardenas100% (2)
- Planos de Lima 1613-1983 - Juan Gunther DoeringDocumento49 páginasPlanos de Lima 1613-1983 - Juan Gunther DoeringCristal Gordillo100% (2)
- Seguidor de Linea NegraDocumento6 páginasSeguidor de Linea NegraAndrés TulcánAún no hay calificaciones
- Informe de VelocistaDocumento8 páginasInforme de VelocistaManuel Quintero GutierrezAún no hay calificaciones
- Informe Robot SumoDocumento10 páginasInforme Robot SumoGustavo Adolfo50% (2)
- Charlas 5 Min Proteccion de Brazos y ManosDocumento1 páginaCharlas 5 Min Proteccion de Brazos y ManosMisaki Onodera100% (1)
- Carro Hugo JorgeDocumento5 páginasCarro Hugo JorgeJorge Jiménez AlvarezAún no hay calificaciones
- Robot Esquivador de ObstáculosDocumento4 páginasRobot Esquivador de ObstáculosMiguel Anibal Mejia Bravo0% (1)
- Revista Robot RastreadorDocumento9 páginasRevista Robot RastreadorluismanmasterAún no hay calificaciones
- Informe Práctica 3Documento13 páginasInforme Práctica 3Fabricio Veintimilla BautistaAún no hay calificaciones
- Seguidor de LineaDocumento8 páginasSeguidor de LineaNicolas Joel PerrazoAún no hay calificaciones
- Seguidor de LineaDocumento18 páginasSeguidor de LineaFlow87Aún no hay calificaciones
- Proyecto 7 Fase 1Documento15 páginasProyecto 7 Fase 1Eduardo Moises Hernandez SalazarAún no hay calificaciones
- Robot SumoDocumento27 páginasRobot Sumojavipollo13100% (1)
- AnteproyectoDocumento7 páginasAnteproyectoPablo VillaAún no hay calificaciones
- Seguidor de LineaDocumento3 páginasSeguidor de LineaRamdhar Hadit Yusseff VanegasAún no hay calificaciones
- Robot Seguidor de LineaDocumento14 páginasRobot Seguidor de LineaBeymar Beltran SebastianAún no hay calificaciones
- Plan de Trabajo Investigacion RoboticaDocumento7 páginasPlan de Trabajo Investigacion RoboticaxorogerAún no hay calificaciones
- Proyecto Final de Cafi 2Documento7 páginasProyecto Final de Cafi 2Anghelo David Palomino ArevaloAún no hay calificaciones
- El Anteproyecto MinisumoDocumento7 páginasEl Anteproyecto MinisumopedroAún no hay calificaciones
- Estructura de Un ROBOTDocumento51 páginasEstructura de Un ROBOTlalala99999Aún no hay calificaciones
- Diseño y Construcción Del Robot SumoDocumento5 páginasDiseño y Construcción Del Robot Sumogerardo.g.c57144Aún no hay calificaciones
- Seguidor de Línea (Informe)Documento12 páginasSeguidor de Línea (Informe)DanyJavier55% (11)
- Carrito Seguidor de LineaDocumento22 páginasCarrito Seguidor de LineamikelkatenaAún no hay calificaciones
- Reporte Seguidor de LineaDocumento16 páginasReporte Seguidor de LineaJaime LMAún no hay calificaciones
- PROPUESTADocumento11 páginasPROPUESTAEdison SaavedraAún no hay calificaciones
- Proyecto Manual de Usuario Carro Seguidor de LineaDocumento41 páginasProyecto Manual de Usuario Carro Seguidor de Lineajose medina100% (1)
- Robot Sumo PDFDocumento10 páginasRobot Sumo PDFCarlos SánchezAún no hay calificaciones
- El Robot Y Sus PartesDocumento22 páginasEl Robot Y Sus PartesJose Luis RodriguezAún no hay calificaciones
- Paper de ROBOT Seguidor de LineaDocumento7 páginasPaper de ROBOT Seguidor de LineaGbrocks KorntezAún no hay calificaciones
- Robot SumoDocumento6 páginasRobot SumoDaniel Lopez Coca REXAún no hay calificaciones
- Reporte Seguidor de LineaDocumento11 páginasReporte Seguidor de Lineabryan jaret vargas gomezzAún no hay calificaciones
- Tutorialvelocibotcbrv 170320193956Documento22 páginasTutorialvelocibotcbrv 170320193956Ismael DAún no hay calificaciones
- Robot Seguidor de LineaDocumento16 páginasRobot Seguidor de LineaAnaLupeP̶a̶x̶i̶Aún no hay calificaciones
- ROBOTDocumento6 páginasROBOTJhelber LazoAún no hay calificaciones
- Minibot SDocumento7 páginasMinibot Slisbeth escalonaAún no hay calificaciones
- Micro Servo RobotDocumento8 páginasMicro Servo RobotCristianAún no hay calificaciones
- Informe Robótica 2Documento15 páginasInforme Robótica 2Joshep LuisAún no hay calificaciones
- Robotica - Brazo Robotico Con Pic'sDocumento9 páginasRobotica - Brazo Robotico Con Pic'sRaul Alberto Valdez BarreraAún no hay calificaciones
- Informe Robot SumoDocumento10 páginasInforme Robot SumoFrancisco Romeo GalindoAún no hay calificaciones
- Mega Sumo RCDocumento15 páginasMega Sumo RCMichelle FosterAún no hay calificaciones
- Robot Seguidor de LuzDocumento11 páginasRobot Seguidor de LuzAnaLupeP̶a̶x̶i̶100% (1)
- Carrito Seguidor de LíneaDocumento12 páginasCarrito Seguidor de LíneaAngelAún no hay calificaciones
- Brazo Robotico OmnidireccionalDocumento51 páginasBrazo Robotico OmnidireccionalAndre LlanosAún no hay calificaciones
- PROYECTOFINALDocumento23 páginasPROYECTOFINALOptica MecatronicaAún no hay calificaciones
- Proyecto Robot LaberintoDocumento12 páginasProyecto Robot LaberintoAleXander DiiazAún no hay calificaciones
- Informe de Robot FernandezDocumento9 páginasInforme de Robot FernandezRoberto FernandezAún no hay calificaciones
- Tercer Aca LaboratoriosDocumento4 páginasTercer Aca LaboratoriostumamadkAún no hay calificaciones
- Robot SumoDocumento10 páginasRobot Sumojose.cerrograndeAún no hay calificaciones
- Robot Seguidor de LineaDocumento9 páginasRobot Seguidor de Linearsjgamer2829Aún no hay calificaciones
- Elmercadomunicipal 200628 140314Documento3 páginasElmercadomunicipal 200628 140314milbert parraAún no hay calificaciones
- ANROSDocumento2 páginasANROSmilbert parraAún no hay calificaciones
- Ensayo Milbert ParraDocumento2 páginasEnsayo Milbert Parramilbert parraAún no hay calificaciones
- BolsasdeValoresDesarrollo 200628 140934Documento5 páginasBolsasdeValoresDesarrollo 200628 140934milbert parraAún no hay calificaciones
- Eltermmetro 200628 143712Documento5 páginasEltermmetro 200628 143712milbert parraAún no hay calificaciones
- Bolsa de Valores de Caracas Vs Otras Bolsas Del PaísDocumento3 páginasBolsa de Valores de Caracas Vs Otras Bolsas Del Paísmilbert parraAún no hay calificaciones
- Ensayo Milbert ParraDocumento2 páginasEnsayo Milbert Parramilbert parraAún no hay calificaciones
- Ensayo de Grado Oscar CastroDocumento20 páginasEnsayo de Grado Oscar Castromilbert parraAún no hay calificaciones
- Canal Pos PDFDocumento2 páginasCanal Pos PDFmilbert parraAún no hay calificaciones
- 21 TIPS para Emprendedores Venezolaos - 2019 PDFDocumento17 páginas21 TIPS para Emprendedores Venezolaos - 2019 PDFmilbert parraAún no hay calificaciones
- Excelente Guía de Un Buen ProfesionalDocumento12 páginasExcelente Guía de Un Buen ProfesionaleddiamjmhAún no hay calificaciones
- Ejercicios de P. P. y E. Diurna 2023Documento21 páginasEjercicios de P. P. y E. Diurna 2023Manuel salvador “Salva” Vasquez reyesAún no hay calificaciones
- MC1 EmocionesDocumento4 páginasMC1 EmocionesEunice Lugo100% (1)
- Evolucion de Las LamparasDocumento12 páginasEvolucion de Las LamparasIsidoro HernandezAún no hay calificaciones
- Brutal Is MoDocumento73 páginasBrutal Is MoIsabel Giron AnculleAún no hay calificaciones
- Ropa AjustadaDocumento25 páginasRopa AjustadaMayra AlejandraAún no hay calificaciones
- Trabajo Mate BacteriasDocumento6 páginasTrabajo Mate BacteriasBryan Alexander P. VegaAún no hay calificaciones
- Finanzas Caso Fresh Fruit, S.ADocumento9 páginasFinanzas Caso Fresh Fruit, S.AjmgnAún no hay calificaciones
- Sesión 5. - Segundo SecDocumento5 páginasSesión 5. - Segundo SecrankeduAún no hay calificaciones
- Brochure Dr. AunaDocumento7 páginasBrochure Dr. AunaIrvingAún no hay calificaciones
- Guia de Recuperacion Fisica Grabriela MontesDocumento4 páginasGuia de Recuperacion Fisica Grabriela MontesWilliam CoyAún no hay calificaciones
- 2014 Julieta Boy La Altura de Los SuenosDocumento3 páginas2014 Julieta Boy La Altura de Los SuenosinesfloresguzmanAún no hay calificaciones
- 1 PDFDocumento10 páginas1 PDFhgcuAún no hay calificaciones
- Arbol Problemas ZOOPDocumento7 páginasArbol Problemas ZOOPsimciarqdis100% (1)
- COMPRENSION LECTORA 2º y 3º, Práctica GuiadaDocumento14 páginasCOMPRENSION LECTORA 2º y 3º, Práctica GuiadaPamela MuñozAún no hay calificaciones
- Los Textos Argumentativos y El Lenguaje en La Argumentacion Fabian Andres Ortiz CifuentesDocumento7 páginasLos Textos Argumentativos y El Lenguaje en La Argumentacion Fabian Andres Ortiz CifuentesFabian Andrés Ortiz CifuentesAún no hay calificaciones
- Diccionario de KpopDocumento3 páginasDiccionario de KpopvalAún no hay calificaciones
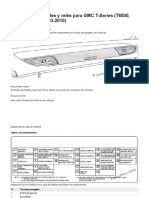
- Digrama Fusibles GMC t7500 2006Documento8 páginasDigrama Fusibles GMC t7500 2006ObedAlvaradoAún no hay calificaciones
- Tarea de Contabilidad 5Documento1 páginaTarea de Contabilidad 5jose cordonesAún no hay calificaciones
- Espectroscopia Atomica (Absorcion, Fluorescencia y Emisión)Documento67 páginasEspectroscopia Atomica (Absorcion, Fluorescencia y Emisión)Mercedes Pinedo TiconaAún no hay calificaciones
- Cronograma - 1er C 2022Documento1 páginaCronograma - 1er C 2022TommyAún no hay calificaciones
- Ejemplo Del Modelo IntuitivoDocumento2 páginasEjemplo Del Modelo IntuitivoCynthia CQAún no hay calificaciones
- Informe Dee GeomorfoDocumento16 páginasInforme Dee GeomorfoWilliams Nuñez EspetiaAún no hay calificaciones
- Ecuación de BernoulliDocumento6 páginasEcuación de BernoulliGeovanny Quiroz MoncerradAún no hay calificaciones