También podría gustarte
- Control de VibracionesDocumento4 páginasControl de VibracionesManuel Ant. Taveras MonteroAún no hay calificaciones
- Informe AmortiguadorDocumento8 páginasInforme AmortiguadorAlfredo Oña100% (1)
- Resumen Capitulo 8Documento7 páginasResumen Capitulo 8Juan José MorazánAún no hay calificaciones
- Guia 1a ParteDocumento25 páginasGuia 1a ParterambetsAún no hay calificaciones
- Construccion de Un ControladorDocumento7 páginasConstruccion de Un ControladorCarlos SanchezAún no hay calificaciones
- Exposicion Mesa Vibratoria AntisimicaDocumento16 páginasExposicion Mesa Vibratoria AntisimicaAnderson Alvarado RojasAún no hay calificaciones
- Resumen DinamDocumento4 páginasResumen DinamcarolinaAún no hay calificaciones
- Deber 1Documento8 páginasDeber 1Danny MartínezAún no hay calificaciones
- Antena Azimutal ProyectoDocumento5 páginasAntena Azimutal Proyectohugo50050% (2)
- ESTADO DEL ARTE Plataforma VibracionDocumento6 páginasESTADO DEL ARTE Plataforma VibracionAlex Af OrtegaAún no hay calificaciones
- Informe TécnicoDocumento7 páginasInforme TécnicoDani BasAún no hay calificaciones
- Artículo Análisis ModalDocumento17 páginasArtículo Análisis ModalTecnicas Predictivas SacAún no hay calificaciones
- A E Pushover PDFDocumento27 páginasA E Pushover PDFAlbert Luque Ramirez100% (2)
- Sismo Espectro de ResuestasDocumento23 páginasSismo Espectro de ResuestasAlexito Melgarejo GuillermoAún no hay calificaciones
- 1ra Sesion Introducción - Laplace - FdeTDocumento57 páginas1ra Sesion Introducción - Laplace - FdeTmjjulcam2Aún no hay calificaciones
- Memoria de Cálculo ColegioDocumento25 páginasMemoria de Cálculo ColegioEUGENIA VALLE CARBAJALAún no hay calificaciones
- Laboratorio Virtual n3Documento18 páginasLaboratorio Virtual n3Anthony Flores CaysahuanaAún no hay calificaciones
- Las Transmisiones Son Los Elementos Encargados de Transmitir El Movimiento Desde Los Actuadores Hasta Las ArticulacionesDocumento5 páginasLas Transmisiones Son Los Elementos Encargados de Transmitir El Movimiento Desde Los Actuadores Hasta Las ArticulacionesSebastian JimenezAún no hay calificaciones
- Practica 1 Modelado Matematico de Sistemas LinealesDocumento15 páginasPractica 1 Modelado Matematico de Sistemas LinealesJOSE PEDRO ORTUÑO FLORESAún no hay calificaciones
- Sistema de ControlDocumento10 páginasSistema de ControlArismendy Estevez Nuñez100% (1)
- Vibraciones Mecanicas PDFDocumento16 páginasVibraciones Mecanicas PDFKeyter Javier CoelloAún no hay calificaciones
- RESULTADOS DinamicaDocumento3 páginasRESULTADOS DinamicaJose Saul Caja SerranoAún no hay calificaciones
- Quaketek EspañolDocumento4 páginasQuaketek EspañolErika Lucia Martinez MarquezAún no hay calificaciones
- Informe Final Proyecto SCA-Grupo 4Documento25 páginasInforme Final Proyecto SCA-Grupo 4anthony tobar quezadaAún no hay calificaciones
- Ieee Estado Del ArteDocumento3 páginasIeee Estado Del ArteRoberto Carlos Barragán CamposAún no hay calificaciones
- 2020-1 Guia LaboratorioASDDocumento5 páginas2020-1 Guia LaboratorioASDDiego ParedesAún no hay calificaciones
- El Sistema de Suspensión ActivaDocumento2 páginasEl Sistema de Suspensión ActivaAlex Coronado SaucedoAún no hay calificaciones
- Balancin de Dos Grados de LibertadDocumento7 páginasBalancin de Dos Grados de LibertadruddyAún no hay calificaciones
- Movimiento Armónico AmortiguadoDocumento9 páginasMovimiento Armónico AmortiguadoGerardo Antonio TrejoAún no hay calificaciones
- Informe de Laboratorio ResonanciaDocumento11 páginasInforme de Laboratorio Resonanciajeissonbernal100% (1)
- Viaducto de La Línea 5 Del Metro de SantiagoDocumento2 páginasViaducto de La Línea 5 Del Metro de SantiagoVnZCheatAún no hay calificaciones
- Traduccion Analisis.. 119 A 124Documento19 páginasTraduccion Analisis.. 119 A 124VanesaLlaqueRequeAún no hay calificaciones
- Historia ChadwckDocumento20 páginasHistoria ChadwckJuan AzabacheAún no hay calificaciones
- Diseno Pavimentos Rigidos Metodo Aashto 2013 AlumnosDocumento39 páginasDiseno Pavimentos Rigidos Metodo Aashto 2013 AlumnosAndrianita LindaAún no hay calificaciones
- Aplicaciones de La Teoría de VibracionesDocumento5 páginasAplicaciones de La Teoría de VibracionesAbel BetankourtAún no hay calificaciones
- Control Analógico de Posición de Motor DCDocumento5 páginasControl Analógico de Posición de Motor DCBryan Samos AlbornozAún no hay calificaciones
- Reporte 5 AF 5.Documento5 páginasReporte 5 AF 5.Paul AguilarAún no hay calificaciones
- Control PIDDocumento21 páginasControl PIDFernando JerezAún no hay calificaciones
- Máquina de Balanceo DinámicoDocumento11 páginasMáquina de Balanceo DinámicoArek RmzAún no hay calificaciones
- DEFLECTÓMETRO DE IMPACTO Dynatest HWD 8081Documento6 páginasDEFLECTÓMETRO DE IMPACTO Dynatest HWD 8081roy apaza villavicencioAún no hay calificaciones
- Posible Informe 4Documento14 páginasPosible Informe 4valentronicaAún no hay calificaciones
- 1compensacion Adelanto LGRDocumento42 páginas1compensacion Adelanto LGRAngel FullerAún no hay calificaciones
- Proyecto Pavimentos DIPAVDocumento18 páginasProyecto Pavimentos DIPAVCristian Armando Carrasco TorrezAún no hay calificaciones
- Columna Resonante CRDocumento9 páginasColumna Resonante CRJulián GuerreroAún no hay calificaciones
- Instrumentación de ProcesosDocumento10 páginasInstrumentación de ProcesosIsmael MinchalaAún no hay calificaciones
- Informe 1 Cap1 Control Unidad 2Documento11 páginasInforme 1 Cap1 Control Unidad 2Nachiin MolinaAún no hay calificaciones
- Trabajo 3 Procesos Ind. Adolfo Flores RDocumento9 páginasTrabajo 3 Procesos Ind. Adolfo Flores RAdolfo FloresAún no hay calificaciones
- Diseño de CompensadoresDocumento75 páginasDiseño de Compensadoresjohn100% (1)
- Ensayos Con El Equipo TriaxialDocumento11 páginasEnsayos Con El Equipo TriaxialKlenner CamayoAún no hay calificaciones
- Iso7919 MdiDocumento10 páginasIso7919 Mdialejandromoya17Aún no hay calificaciones
- Apunte - Realimentación-4 PP, Foros de Electronica 2008Documento4 páginasApunte - Realimentación-4 PP, Foros de Electronica 2008Victor R VazquezAún no hay calificaciones
- Lab 6 CTR 2Documento4 páginasLab 6 CTR 2Felipe MoreraAún no hay calificaciones
- 1 CAPlibroDocumento8 páginas1 CAPlibroDanny MartínezAún no hay calificaciones
- MEMORIA DE CALCULO 4 PisosDocumento34 páginasMEMORIA DE CALCULO 4 PisosAldo Eduardo Orocaja MoránAún no hay calificaciones
- Sintonización PSSDocumento12 páginasSintonización PSSDavid Ricardo VallejoAún no hay calificaciones
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Dinámica de estructuras: Sistemas de un grado de libertadDe EverandDinámica de estructuras: Sistemas de un grado de libertadCalificación: 4.5 de 5 estrellas4.5/5 (4)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Manual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)De EverandManual de instrumentación para aire acondicionado: Del termostato a los sistemas de control y gestión de edificios (BMS)Calificación: 2 de 5 estrellas2/5 (1)
- G5 - Aparatos Sanitarios InteligentesDocumento12 páginasG5 - Aparatos Sanitarios InteligentesLesly LlanosAún no hay calificaciones
- Certificación LeedDocumento8 páginasCertificación LeedLesly LlanosAún no hay calificaciones
- Grupo 5 - Cálculo de La Red AAPP FríaDocumento19 páginasGrupo 5 - Cálculo de La Red AAPP FríaLesly LlanosAún no hay calificaciones
- Capítulo 7 - Apartados 3 y 4 - Llanos LeslyDocumento17 páginasCapítulo 7 - Apartados 3 y 4 - Llanos LeslyLesly LlanosAún no hay calificaciones
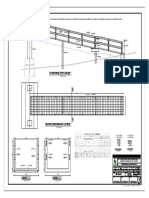
- Detalle 3: Elevacion Lateral de Tablero (Pasamano)Documento1 páginaDetalle 3: Elevacion Lateral de Tablero (Pasamano)Lesly LlanosAún no hay calificaciones
- Acceso Izq. Aguas Abajo: Gobierno Autónomo Descentralizado Provincial de Zamora ChinchipeDocumento1 páginaAcceso Izq. Aguas Abajo: Gobierno Autónomo Descentralizado Provincial de Zamora ChinchipeLesly LlanosAún no hay calificaciones
- T04 Grupo N6Documento14 páginasT04 Grupo N6Lesly LlanosAún no hay calificaciones
- T02 Ríos RobertoDocumento2 páginasT02 Ríos RobertoLesly LlanosAún no hay calificaciones
- T07 Llanos LeslyDocumento5 páginasT07 Llanos LeslyLesly LlanosAún no hay calificaciones
- T07 LlanosDocumento4 páginasT07 LlanosLesly LlanosAún no hay calificaciones
- LLANOS LESLY Tarea12Documento13 páginasLLANOS LESLY Tarea12Lesly LlanosAún no hay calificaciones
- VIZCAINO JUAN Tarea12Documento8 páginasVIZCAINO JUAN Tarea12Lesly LlanosAún no hay calificaciones
- Proyecto Mi Abuelo MOMENTO IDocumento12 páginasProyecto Mi Abuelo MOMENTO IyiyiAún no hay calificaciones
- Investigación en Trabajo Social Una Contextualización PeruanaDocumento7 páginasInvestigación en Trabajo Social Una Contextualización PeruanaStefany BastidasAún no hay calificaciones
- Sesion 01 Enfoque AmbientalDocumento22 páginasSesion 01 Enfoque AmbientalJuan Carlos Huanca MamaniAún no hay calificaciones
- Unidad II-2.1-Metodología para La Solución de Problemas-1Documento27 páginasUnidad II-2.1-Metodología para La Solución de Problemas-1Yessenia OrtizAún no hay calificaciones
- Lazo de Fase Cerrada de Precisión1Documento17 páginasLazo de Fase Cerrada de Precisión1Jessy GuilcasoAún no hay calificaciones
- Determinacion Del Uso Del Suelo Mediante La Caracterizacion Fisica y Morfologica en La Vereda de Mancilla en El Municipio de Facatativa CundinamarcaDocumento4 páginasDeterminacion Del Uso Del Suelo Mediante La Caracterizacion Fisica y Morfologica en La Vereda de Mancilla en El Municipio de Facatativa CundinamarcaAlejandro DuarteAún no hay calificaciones
- Plan Nacional de DerechosDocumento2 páginasPlan Nacional de DerechosCamila NoriegaAún no hay calificaciones
- Tobias Alejo - Las FamiliasDocumento5 páginasTobias Alejo - Las Familiasjuana rosa balcazarAún no hay calificaciones
- Reglamento Interno MIRA 2018 UltimoDocumento47 páginasReglamento Interno MIRA 2018 UltimoGabyss Llanos100% (2)
- Lectura BDocumento4 páginasLectura BDianaL.RojasCalderónAún no hay calificaciones
- GUIA PRACTICA 8 PH y CEDocumento6 páginasGUIA PRACTICA 8 PH y CEvictor trocelAún no hay calificaciones
- Jorge Santana Leslieth Zapata Entregable 2Documento30 páginasJorge Santana Leslieth Zapata Entregable 2Fernando SantanaAún no hay calificaciones
- Llanura PampeanaaDocumento2 páginasLlanura Pampeanaasolcito_ceballosAún no hay calificaciones
- Trabajo Grupal en Word o PDF PUMADocumento22 páginasTrabajo Grupal en Word o PDF PUMAGabriela Puma DupuyAún no hay calificaciones
- Guía para La Presentación de La Disertación Final FCEN 24 Nov 2016Documento21 páginasGuía para La Presentación de La Disertación Final FCEN 24 Nov 2016Adri AnaAún no hay calificaciones
- 1ie133 Informe#2 JR, DT, Ec, Da (A)Documento5 páginas1ie133 Informe#2 JR, DT, Ec, Da (A)Juan RemiceAún no hay calificaciones
- ReporteDocumento11 páginasReportealex hernandezAún no hay calificaciones
- MATRIZ No 1. Terapia OcupacionalDocumento6 páginasMATRIZ No 1. Terapia OcupacionalDEISY PAOLA CHAMORRO MEDINAAún no hay calificaciones
- Guía de Práctica N°15 22-1Documento4 páginasGuía de Práctica N°15 22-1Tommy VercettiAún no hay calificaciones
- Aplicación de La Tecnologia en La ConstrucciónDocumento22 páginasAplicación de La Tecnologia en La ConstrucciónJAHIR ALBERTO CASTILLO AVILAAún no hay calificaciones
- Procedimiento de ExcavacionDocumento9 páginasProcedimiento de ExcavacionCIMACO HSEQAún no hay calificaciones
- 03-Tr1-Usm OkDocumento39 páginas03-Tr1-Usm OkVale OliveraAún no hay calificaciones
- Calculo Diferencial e IntegralDocumento11 páginasCalculo Diferencial e IntegralLuisa Mee 666Aún no hay calificaciones
- Formato Acta Compromiso Uso Dosimetro Personal v1 DigsaDocumento2 páginasFormato Acta Compromiso Uso Dosimetro Personal v1 DigsaJhonatan Largacha PerdomoAún no hay calificaciones
- Memoria Descriptiva OvidDocumento3 páginasMemoria Descriptiva OvidExo-L Reveluv bad boyAún no hay calificaciones
- Unidad III - LenguaDocumento10 páginasUnidad III - LenguaRogelio DiazAún no hay calificaciones
- Tesina 2Documento17 páginasTesina 2hijodebudasAún no hay calificaciones
- LogicaDocumento5 páginasLogicaLuz Loida Licas TorresAún no hay calificaciones
- Sgssoma Trabajo de ExpocicionDocumento26 páginasSgssoma Trabajo de ExpocicionBrayan Mamani TipoAún no hay calificaciones
- RODRIGUEZ CIDRE E and E J BUIS Eds La PoDocumento399 páginasRODRIGUEZ CIDRE E and E J BUIS Eds La PoALEJANDRO100% (2)