
También podría gustarte
- Lab 04 Transf Fourier T-Continuo PDFDocumento4 páginasLab 04 Transf Fourier T-Continuo PDFGustavo HernandezAún no hay calificaciones
- Lab 07 MuestreoDocumento3 páginasLab 07 MuestreoPaolaAún no hay calificaciones
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
- Lab 03 SeriesFourier PDFDocumento4 páginasLab 03 SeriesFourier PDF'Jph Flores BmxAún no hay calificaciones
- ProblemasDocumento7 páginasProblemasFrancisco ChangoAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Problemas t1Documento7 páginasProblemas t1Harold Alexander Parra RiosAún no hay calificaciones
- Lab 01 SeñalesSistemas PDFDocumento4 páginasLab 01 SeñalesSistemas PDF'Jph Flores BmxAún no hay calificaciones
- Lab 02 Sistemas LTI PDFDocumento4 páginasLab 02 Sistemas LTI PDF'Jph Flores BmxAún no hay calificaciones
- Guia EjerciciosDocumento36 páginasGuia EjerciciosRao RaoAún no hay calificaciones
- Proakis Ejercicios Cap 2Documento12 páginasProakis Ejercicios Cap 2Anonymous yeTg3p1faHAún no hay calificaciones
- (PDS) Lab 03 Sdlit 17 IIDocumento8 páginas(PDS) Lab 03 Sdlit 17 IIqwer33Aún no hay calificaciones
- Taller1 SyS 20191Documento2 páginasTaller1 SyS 20191Andres Felipe Vargas JimenezAún no hay calificaciones
- pr02 Sistemas PDFDocumento13 páginaspr02 Sistemas PDFErinson Javier Toscano RojasAún no hay calificaciones
- AyPS TP 1 PDFDocumento4 páginasAyPS TP 1 PDFNataniel MaggioraAún no hay calificaciones
- Taller Segundo Parcial Señales y Sistemas IDocumento3 páginasTaller Segundo Parcial Señales y Sistemas ISamuel SanchezAún no hay calificaciones
- Capitulo 3 EjerciciosDocumento54 páginasCapitulo 3 EjerciciosSCAún no hay calificaciones
- Taller 1 - Señales y SistemasDocumento2 páginasTaller 1 - Señales y SistemasEsteban rJAún no hay calificaciones
- Taller de Primer Parcial, Análisis de Señales en Tiempo Discreto - DSP (2018-03)Documento2 páginasTaller de Primer Parcial, Análisis de Señales en Tiempo Discreto - DSP (2018-03)Alba RamirezAún no hay calificaciones
- Control Digital Taller ParcialDocumento3 páginasControl Digital Taller ParcialOmar David Peña IbarraAún no hay calificaciones
- Guia de Ejercicios Prueba 2Documento2 páginasGuia de Ejercicios Prueba 2matias parra cuellarAún no hay calificaciones
- Analisis de Señales y SistemasDocumento2 páginasAnalisis de Señales y SistemasAnderson RomeroAún no hay calificaciones
- Laboratorio 1Documento16 páginasLaboratorio 1Claudio BanegasAún no hay calificaciones
- Ip1 BPCDocumento13 páginasIp1 BPCSebastián BlasAún no hay calificaciones
- Deber 1Documento4 páginasDeber 1Lüîîs PâçhëçôôAún no hay calificaciones
- Práctica 1Documento5 páginasPráctica 1Victoria RobadorAún no hay calificaciones
- Lab 03 SeriesFourierDocumento4 páginasLab 03 SeriesFourierrickytom01 XD0% (1)
- Tarea U1 Senales P60Documento3 páginasTarea U1 Senales P60Gabriel Verdesoto YepezAún no hay calificaciones
- Problemas Tema2 SyCDocumento25 páginasProblemas Tema2 SyCCherpolAún no hay calificaciones
- Senales y Sistemas II RepasoDocumento2 páginasSenales y Sistemas II RepasoSebastian GilAún no hay calificaciones
- Guia - Sistemas 2Documento4 páginasGuia - Sistemas 2lautarodominguez2003Aún no hay calificaciones
- Informe 6 Señales y Sistemas Ricardo Yauri MartinezDocumento14 páginasInforme 6 Señales y Sistemas Ricardo Yauri MartinezEdwin Toledo0% (1)
- Spertuz Taller02Documento10 páginasSpertuz Taller02Sebastiàn RugelesAún no hay calificaciones
- Quadern Dactivitats de Filtres Digitals-4787Documento19 páginasQuadern Dactivitats de Filtres Digitals-4787RodolfoyGaby Piña MendozaAún no hay calificaciones
- Taller 2 Señales & SistemasDocumento9 páginasTaller 2 Señales & SistemasStefany PiandoyAún no hay calificaciones
- p3 14Documento6 páginasp3 14javirv19Aún no hay calificaciones
- Laboratorio N°1 - Control DigitalDocumento7 páginasLaboratorio N°1 - Control DigitalEtson Heasid Tarazona CalixtoAún no hay calificaciones
- Examen 2021 Julio SolucionDocumento11 páginasExamen 2021 Julio SolucionEl memes espanolAún no hay calificaciones
- Deber No 3 - SS - P59Documento5 páginasDeber No 3 - SS - P59Santi KvAún no hay calificaciones
- Tarea 2 Grupo 28 Aldair PoloDocumento20 páginasTarea 2 Grupo 28 Aldair PoloDavid PoloAún no hay calificaciones
- SYS - Enero2020 - Continua - SolucionesDocumento9 páginasSYS - Enero2020 - Continua - SolucionesLucíaAún no hay calificaciones
- Practica Parcial Fundamentos DSP p1 1ff0Documento2 páginasPractica Parcial Fundamentos DSP p1 1ff0Linda CastilloAún no hay calificaciones
- Ejercicios Procesamiento de SeñalesDocumento4 páginasEjercicios Procesamiento de SeñalesAlejandro de los SantosAún no hay calificaciones
- Taller SeñalesDocumento3 páginasTaller SeñalesSebastián Medina RaigozaAún no hay calificaciones
- Unidad III Sistemas LitceDocumento8 páginasUnidad III Sistemas LitceCarlos Gomez0% (1)
- Deber1 Señales 2022BDocumento2 páginasDeber1 Señales 2022BSebas BunnyAún no hay calificaciones
- Problemas Segundo ParcialDocumento2 páginasProblemas Segundo ParcialJose MontiveroAún no hay calificaciones
- Problemas Segundo ParcialDocumento2 páginasProblemas Segundo ParcialJose MontiveroAún no hay calificaciones
- Lab1p1 2021Documento4 páginasLab1p1 2021Danilo Andre LuqueAún no hay calificaciones
- p5 14Documento6 páginasp5 14javirv19Aún no hay calificaciones
- Procesamiento D1Documento8 páginasProcesamiento D1erikaAún no hay calificaciones
- Practica 0Documento11 páginasPractica 0Rodrigo MuñozAún no hay calificaciones
- Examen Sistemas Lineales SolucionadoDocumento7 páginasExamen Sistemas Lineales SolucionadoDani VicenteAún no hay calificaciones
- Analisis de Señales y Sistemas (MATLab)Documento3 páginasAnalisis de Señales y Sistemas (MATLab)FranciscoAún no hay calificaciones
- Tarea 1 - Operaciones Básicas de Señales y Sistemas Continuos y DiscretosDocumento13 páginasTarea 1 - Operaciones Básicas de Señales y Sistemas Continuos y Discretosroger betancourthAún no hay calificaciones
- Practica N°1-SLDDocumento2 páginasPractica N°1-SLDMax HjavierAún no hay calificaciones
- Detailing For ETABS & SAP2000 V20Documento13 páginasDetailing For ETABS & SAP2000 V20Huber AbadAún no hay calificaciones
- Manual CTO Infectología, 10ma Ed. 2018Documento172 páginasManual CTO Infectología, 10ma Ed. 2018opretell88% (8)
- MULTIPLEXORESDocumento12 páginasMULTIPLEXORESDaniel Florín BeltránAún no hay calificaciones
- Lanata S DesestimaciónDocumento1 páginaLanata S DesestimaciónDanielaTatarskyAún no hay calificaciones
- Base Datos Prioridad 1. Nueva Clinica de Santo Tomas S.A Agendamiento. IndiraDocumento16 páginasBase Datos Prioridad 1. Nueva Clinica de Santo Tomas S.A Agendamiento. IndiraIndira Arenas SantamariaAún no hay calificaciones
- Qué Son Los PodcastDocumento9 páginasQué Son Los PodcastCrissAún no hay calificaciones
- Estructura de LlamadaDocumento3 páginasEstructura de Llamadayuly acevedoAún no hay calificaciones
- Evaluacion Mod III CostosDocumento4 páginasEvaluacion Mod III CostosEDWARDAún no hay calificaciones
- Balotario de GeometriaDocumento7 páginasBalotario de GeometriaAngel ChapoñanAún no hay calificaciones
- Examen Final SDocumento4 páginasExamen Final SJeymi Marlit Lajo MermaAún no hay calificaciones
- Prueba de MeiosisDocumento4 páginasPrueba de MeiosisYessica SanchezAún no hay calificaciones
- Motomel Sirius 250 (Manual)Documento14 páginasMotomel Sirius 250 (Manual)Kennet50% (2)
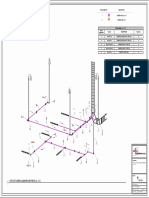
- Luminarias - Plano - l107 - Vista 3d Tuberia Luminaria Despiece (l3 - l2)Documento1 páginaLuminarias - Plano - l107 - Vista 3d Tuberia Luminaria Despiece (l3 - l2)alonso romeroAún no hay calificaciones
- Actividad 1 Fundamentos Biomecanicos - BDocumento4 páginasActividad 1 Fundamentos Biomecanicos - BMari Cami Arraez Osorio100% (1)
- Roscada NPT+ Soldar SWDocumento7 páginasRoscada NPT+ Soldar SWGisella Mariel RubilarAún no hay calificaciones
- Producto Academico 1 Gestion LogisticaDocumento6 páginasProducto Academico 1 Gestion Logistica73940915Aún no hay calificaciones
- Especificaciones y Dimensiones para El Armado de CajasDocumento4 páginasEspecificaciones y Dimensiones para El Armado de CajasNatalia ChallaAún no hay calificaciones
- Formato Proyecto de Investigacion ECOCHARGEDocumento7 páginasFormato Proyecto de Investigacion ECOCHARGEFernanda ariasAún no hay calificaciones
- Diagrama de ColaboraciónDocumento11 páginasDiagrama de ColaboraciónJosé Manuel Hernández LaraAún no hay calificaciones
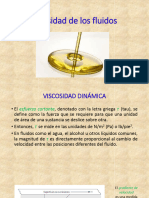
- Viscosidad de Los FluidosDocumento46 páginasViscosidad de Los FluidosDIEGO ALEXANDER CUEVA OBESOAún no hay calificaciones
- Universidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica y EléctricaDocumento6 páginasUniversidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica y EléctricaJhair RodríguezAún no hay calificaciones
- PR SST Pts003 Hormigonado de Losa MuroDocumento13 páginasPR SST Pts003 Hormigonado de Losa Muromarcelo gamboaAún no hay calificaciones
- 1.datos - Brechas de InversionDocumento13 páginas1.datos - Brechas de InversionHector Rivera CamposAún no hay calificaciones
- Instructivo Matriculas UNAD 2020 Periodo 8-03Documento11 páginasInstructivo Matriculas UNAD 2020 Periodo 8-03yurley karina parada duranAún no hay calificaciones
- 04 Frame RelayDocumento67 páginas04 Frame RelayChristian Benito100% (1)
- Durman Flow Guard GoldDocumento8 páginasDurman Flow Guard GoldMARIO LOPEZAún no hay calificaciones
- TermosifonDocumento1 páginaTermosifonAngie MaldonadoAún no hay calificaciones
- Costos de ServiciosDocumento2 páginasCostos de ServiciosAngeles Zapata CarrascoAún no hay calificaciones
- Guía de Dibujo Técnico DIN Y ASADocumento4 páginasGuía de Dibujo Técnico DIN Y ASAandreaAún no hay calificaciones
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- UF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoDe EverandUF0513 - Gestión auxiliar de archivo en soporte convencional o informáticoCalificación: 1 de 5 estrellas1/5 (1)
- Aprende a Modelar Aplicaciones con UML - Tercera EdiciónDe EverandAprende a Modelar Aplicaciones con UML - Tercera EdiciónCalificación: 2 de 5 estrellas2/5 (1)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaDe EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaCalificación: 4 de 5 estrellas4/5 (32)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- Programación orientada a objetos en JavaDe EverandProgramación orientada a objetos en JavaCalificación: 4 de 5 estrellas4/5 (1)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFDe EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFCalificación: 4.5 de 5 estrellas4.5/5 (7)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Administración Hardware de un Sistema Informático (MF0484_3)De EverandAdministración Hardware de un Sistema Informático (MF0484_3)Aún no hay calificaciones
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)















































































































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-2-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)




