También podría gustarte
- Autoprueba EEC IV - Inyección de Combustible Ford y Control Electrónico Del Motor EEC IV - EEC 4 - TroubleCodes - Net (Español)Documento10 páginasAutoprueba EEC IV - Inyección de Combustible Ford y Control Electrónico Del Motor EEC IV - EEC 4 - TroubleCodes - Net (Español)Juan Pablo Rey BravoAún no hay calificaciones
- Ejercicios de oscilaciones y ondas físicasDocumento28 páginasEjercicios de oscilaciones y ondas físicasCristopher RolandoAún no hay calificaciones
- Cuadernillo SRL Cuarto GradoDocumento84 páginasCuadernillo SRL Cuarto GradoMayra Susana García JiménezAún no hay calificaciones
- Biomecanica de La Cadera - FinalDocumento29 páginasBiomecanica de La Cadera - FinalCrisAme TPAún no hay calificaciones
- Sistemas Dactiloscopicos de Vucetich y HenryDocumento3 páginasSistemas Dactiloscopicos de Vucetich y HenryIbeth PintoAún no hay calificaciones
- Segunda Ley de Newton y Maquina de Atwood, Mi Informe 4Documento23 páginasSegunda Ley de Newton y Maquina de Atwood, Mi Informe 4German Pachajaya VillasanteAún no hay calificaciones
- Guía. Máquina de Atwood - OnlineDocumento9 páginasGuía. Máquina de Atwood - OnlineJuan Sebastian Aguiar CatrillonAún no hay calificaciones
- Resumen Dinamica RotacionalDocumento10 páginasResumen Dinamica RotacionalJuan Felipe M100% (2)
- Maquina AtwoodDocumento5 páginasMaquina AtwoodYuliana PosadaAún no hay calificaciones
- Dinamica de Un Sistema de Particulas 1Documento34 páginasDinamica de Un Sistema de Particulas 1Kenneth GrayAún no hay calificaciones
- Dinamica CarretelDocumento5 páginasDinamica CarretelMark ThomasAún no hay calificaciones
- Fisica 1Documento11 páginasFisica 1Pamela JS VeraAún no hay calificaciones
- Movimiento armónico simple: determinación experimental del periodo y frecuenciaDocumento62 páginasMovimiento armónico simple: determinación experimental del periodo y frecuenciaRogger Sejo HinojosaAún no hay calificaciones
- 5 NMaquinaAtwoodGuia PDFDocumento4 páginas5 NMaquinaAtwoodGuia PDFSantiago AstudilloAún no hay calificaciones
- Lab 05 MOVIMIENTO ARMONICO SIMPLE (T)Documento5 páginasLab 05 MOVIMIENTO ARMONICO SIMPLE (T)Rudy De La CruzAún no hay calificaciones
- Momento de InerciaDocumento3 páginasMomento de InerciaOlaf Durán100% (1)
- Informe Fisica Leyes de Newton Semana 8Documento17 páginasInforme Fisica Leyes de Newton Semana 8Ciara XimenaAún no hay calificaciones
- Pendulo Simple y Fisico2Documento8 páginasPendulo Simple y Fisico2eliza humpiriAún no hay calificaciones
- Hoja 12 Sistema de Particulas y Mecanica Del SolidoDocumento7 páginasHoja 12 Sistema de Particulas y Mecanica Del Solidomoises ushiñaAún no hay calificaciones
- Trabajo de ExposicionesDocumento50 páginasTrabajo de ExposicionesDream BigAún no hay calificaciones
- Parcial 10%fisicaDocumento13 páginasParcial 10%fisicacheiris torresAún no hay calificaciones
- Modulo 2 PDFDocumento27 páginasModulo 2 PDFAlejandroAún no hay calificaciones
- Ejercicios de Dinamica ScribdDocumento36 páginasEjercicios de Dinamica ScribdArturo Rosales100% (1)
- Laboratorio Segunda Ley de NewtonDocumento3 páginasLaboratorio Segunda Ley de NewtonLuis Ángel Jiménez ZabalaAún no hay calificaciones
- Fisica 1 Enero 2014 Problemas FinalDocumento10 páginasFisica 1 Enero 2014 Problemas FinalBenhur AcuñaAún no hay calificaciones
- 1bachillerato Fisica y QuimicaSEPTIEMBREDocumento26 páginas1bachillerato Fisica y QuimicaSEPTIEMBRECentro HipatiaAún no hay calificaciones
- Las tres leyes de Newton y la fuerza, aceleración y tensiónDocumento13 páginasLas tres leyes de Newton y la fuerza, aceleración y tensiónRAMIRO GARCIA VELEZAún no hay calificaciones
- Rotaciones - Laboratorio 5Documento5 páginasRotaciones - Laboratorio 5JAVIERA MONSALVE MONTESINOAún no hay calificaciones
- Dinamica de RotacionDocumento17 páginasDinamica de RotacionbenjaAún no hay calificaciones
- Lista Final IMFDocumento5 páginasLista Final IMFLevAún no hay calificaciones
- YoyoDocumento8 páginasYoyoOscar Alfonso Sandoval SaenzAún no hay calificaciones
- Laboratorio 6 UsachDocumento12 páginasLaboratorio 6 UsachLeonardo Aníbal Alfaro MercadoAún no hay calificaciones
- Ayudantía 1Documento3 páginasAyudantía 1RodrigoEduardoVillalobosBarrazaAún no hay calificaciones
- 3 TP3 Dinamica 22Documento5 páginas3 TP3 Dinamica 22Enrique CardozoAún no hay calificaciones
- CAPITULO 7. Cuerpo RigidoDocumento50 páginasCAPITULO 7. Cuerpo RigidoMelissaMirandaAún no hay calificaciones
- 01 Péndulo Simple 22-23Documento6 páginas01 Péndulo Simple 22-23LusaheAún no hay calificaciones
- Movimiento Armonico SimpleDocumento6 páginasMovimiento Armonico SimpleGregori PiñaAún no hay calificaciones
- Guía de Movimiento Armónico SimpleDocumento6 páginasGuía de Movimiento Armónico SimpleCarolay Q. CandiaAún no hay calificaciones
- TP1 RozamientoDocumento4 páginasTP1 RozamientoCeleste Magalí BonanniAún no hay calificaciones
- Informe Equilibrio de FuerzasDocumento11 páginasInforme Equilibrio de Fuerzasmelania yanapa sonccoAún no hay calificaciones
- Laboratorio #7 Pendulo Simple - BI010102EDocumento9 páginasLaboratorio #7 Pendulo Simple - BI010102EWilliam Jesus Cabrera MezaAún no hay calificaciones
- Movimiento Armonico Amortiguado de La BarraDocumento20 páginasMovimiento Armonico Amortiguado de La BarraManuelFBEAún no hay calificaciones
- INFORME Balanza para Condiciones de IngravidezDocumento8 páginasINFORME Balanza para Condiciones de IngravidezLuis Javier Ibañez BelloAún no hay calificaciones
- L4 Oscilaciones Rotatorias Libres y Forzadas B1A-1Documento18 páginasL4 Oscilaciones Rotatorias Libres y Forzadas B1A-1Paula Mercedes Padilla AzainAún no hay calificaciones
- Segunda ley de Newton: Relación entre aceleración, masa y fricciónDocumento9 páginasSegunda ley de Newton: Relación entre aceleración, masa y fricciónJulian David Forero ArevaloAún no hay calificaciones
- Informe Movimiento Rotacional y TranlacinalDocumento7 páginasInforme Movimiento Rotacional y TranlacinalRicardo JesusAún no hay calificaciones
- Oscilaciones armónicas: Ejercicios y problemas de física 1Documento3 páginasOscilaciones armónicas: Ejercicios y problemas de física 1luiggi malaspinaAún no hay calificaciones
- GUIA 6 - Movimiento CircularDocumento4 páginasGUIA 6 - Movimiento CircularGray D L LeoAún no hay calificaciones
- Experimento9 PDFDocumento4 páginasExperimento9 PDFEdilson ValderramaAún no hay calificaciones
- Certamen FisicaDocumento10 páginasCertamen FisicaRamon TrujilloAún no hay calificaciones
- Pauta Examen 2014 1Documento9 páginasPauta Examen 2014 1Carlos CastroAún no hay calificaciones
- Marco Teórico ApaDocumento2 páginasMarco Teórico Apaesneider bumboAún no hay calificaciones
- Fisica Practica 1Documento5 páginasFisica Practica 1joseAún no hay calificaciones
- G1 2 PDFDocumento4 páginasG1 2 PDFsaciAún no hay calificaciones
- Lab11 Ley de Hooke y Movimiento Armonico SimpleDocumento5 páginasLab11 Ley de Hooke y Movimiento Armonico SimpleJose D Sanchez BurgosAún no hay calificaciones
- Cuerpos RigidosDocumento14 páginasCuerpos RigidosJose GonzalezAún no hay calificaciones
- Impulso y Cantidad de Movimiento - DinamicaDocumento9 páginasImpulso y Cantidad de Movimiento - DinamicaFernando Zuñiga100% (1)
- Informe de Caida Libre y Movimieto RectilineoDocumento9 páginasInforme de Caida Libre y Movimieto RectilineoManuela OsorioAún no hay calificaciones
- Análisis dinámico del sólido rígidoDocumento23 páginasAnálisis dinámico del sólido rígidoLino Alor100% (1)
- Roce PDFDocumento4 páginasRoce PDFRafaelAún no hay calificaciones
- P8 - Lab #8 Pendulo Simple Civil (1) 11 de EneroDocumento5 páginasP8 - Lab #8 Pendulo Simple Civil (1) 11 de EneroGerson Favio Diaz choqueAún no hay calificaciones
- Informe Lab1 Fisica II - MASDocumento12 páginasInforme Lab1 Fisica II - MASSebastian TafurAún no hay calificaciones
- Tarea 1Documento1 páginaTarea 1Francisco Andres Garcia BastiasAún no hay calificaciones
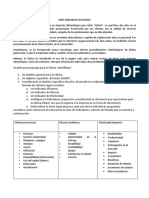
- Taller Indicadores de Gestión - Infanti 2022Documento2 páginasTaller Indicadores de Gestión - Infanti 2022Francisco Andres Garcia BastiasAún no hay calificaciones
- Udd Guia3 Hipótesisdospoblaciones S2 2022Documento2 páginasUdd Guia3 Hipótesisdospoblaciones S2 2022Francisco Andres Garcia BastiasAún no hay calificaciones
- Taller 1Documento2 páginasTaller 1Francisco Andres Garcia BastiasAún no hay calificaciones
- Certamen 2 - Historia de Chile - Francisco GarcíaDocumento1 páginaCertamen 2 - Historia de Chile - Francisco GarcíaFrancisco Andres Garcia BastiasAún no hay calificaciones
- Leadership That Gets Results - Daniel Goleman (1) .En - EsDocumento16 páginasLeadership That Gets Results - Daniel Goleman (1) .En - EsFrancisco Andres Garcia BastiasAún no hay calificaciones
- El Veganismo - Breve IntroducciónDocumento19 páginasEl Veganismo - Breve IntroducciónFrancisco Andres Garcia BastiasAún no hay calificaciones
- Taller 1 - Practicando El Método CientíficoDocumento2 páginasTaller 1 - Practicando El Método CientíficoFrancisco Andres Garcia BastiasAún no hay calificaciones
- El VeganismoDocumento19 páginasEl VeganismoFrancisco Andres Garcia BastiasAún no hay calificaciones
- Medición y presupuesto construcción depósito agua 20.000 m3Documento2 páginasMedición y presupuesto construcción depósito agua 20.000 m3Adrian Car SuaAún no hay calificaciones
- Taller Primer CorteDocumento4 páginasTaller Primer Cortesebastian martinezAún no hay calificaciones
- Ciclo Brayton Con RegeneracionDocumento5 páginasCiclo Brayton Con RegeneracionSebastian RomeroAún no hay calificaciones
- 18 ES Quick Guide Measuring Water FlowDocumento1 página18 ES Quick Guide Measuring Water FlowDaniel RendonAún no hay calificaciones
- Guia Calculo1 LimitesDocumento16 páginasGuia Calculo1 LimitesVictor Eduardo Guerra ReyesAún no hay calificaciones
- Perfiles longitudinales fotogrametriaDocumento27 páginasPerfiles longitudinales fotogrametriaGabriel SanchezAún no hay calificaciones
- Descomponemos Números Naturalases Hasta 800Documento3 páginasDescomponemos Números Naturalases Hasta 800DORIS CONSUELO DIAZ CARRASCOAún no hay calificaciones
- Cálculo de ProposicionesDocumento6 páginasCálculo de ProposicionesAndrés BriceñoAún no hay calificaciones
- Técnica Orr-Sherby - DornDocumento7 páginasTécnica Orr-Sherby - DornSanti Osorio DiezAún no hay calificaciones
- Producto Acad Mico 02 TAREA 1Documento14 páginasProducto Acad Mico 02 TAREA 1Q Llanos HenryAún no hay calificaciones
- Layout AlmacénDocumento3 páginasLayout AlmacénAlexandra PrietoAún no hay calificaciones
- Curso CompletoDocumento97 páginasCurso CompletoJazmin C CondeAún no hay calificaciones
- User Manual RI-995I.manual de Usuario RI-995IDocumento64 páginasUser Manual RI-995I.manual de Usuario RI-995IJuan Ca LunaAún no hay calificaciones
- TE01 - ECL2021. ResoluciónDocumento4 páginasTE01 - ECL2021. ResoluciónMartin VelascoAún no hay calificaciones
- Resumen Del LibroDocumento61 páginasResumen Del LibroSantino PrevostiAún no hay calificaciones
- Planificacion Cuarta Unidad DianaDocumento32 páginasPlanificacion Cuarta Unidad DianalilyAún no hay calificaciones
- Teoria de Arreglos PDFDocumento7 páginasTeoria de Arreglos PDFPipiNewellsAún no hay calificaciones
- Valvulas HDDocumento5 páginasValvulas HDJorge UparelaAún no hay calificaciones
- TAREA GRUPAL No. 1 CAP II-III PAC 2021Documento10 páginasTAREA GRUPAL No. 1 CAP II-III PAC 2021Hilda Miranda100% (1)
- Tema 8 - MatemáticaDocumento20 páginasTema 8 - MatemáticamvasquezlaosAún no hay calificaciones
- Practica 2 Mecanica de FluidosDocumento23 páginasPractica 2 Mecanica de FluidosAdolfo AlmonteAún no hay calificaciones
- Ley de Proporciones Definidas de ProustDocumento4 páginasLey de Proporciones Definidas de Proustfelixyonathan07Aún no hay calificaciones
- Sesión 13 - Principios de AlgoritmosDocumento18 páginasSesión 13 - Principios de AlgoritmosBrandy CainicelaAún no hay calificaciones
- Importancia de Los Paradigmas, Enfoques y Métodos de InvestigaciónDocumento2 páginasImportancia de Los Paradigmas, Enfoques y Métodos de InvestigaciónYader Camilo Caicedo DelgadoAún no hay calificaciones
- Actividad de Cierre de Secuencia Didactica 2Documento3 páginasActividad de Cierre de Secuencia Didactica 2Angel josue gonzalez lopez0% (1)
- ADEL35LZ EspañolDocumento1 páginaADEL35LZ EspañolJhon GarciaAún no hay calificaciones