También podría gustarte
- Principios de transferencia de cantidad de movimientoDe EverandPrincipios de transferencia de cantidad de movimientoAún no hay calificaciones
- Movimiento en El Plano Con Una Velocidad ConstanteDocumento8 páginasMovimiento en El Plano Con Una Velocidad Constantewuisye100% (3)
- Movimiento RelativoDocumento7 páginasMovimiento RelativoKaterin CañizalezAún no hay calificaciones
- Movimiento RelativoDocumento13 páginasMovimiento RelativoEna MercadoAún no hay calificaciones
- Movimiento Relativo ExpoDocumento27 páginasMovimiento Relativo ExpoSelene BorrayoAún no hay calificaciones
- VelocidadDocumento9 páginasVelocidadTiago TorresAún no hay calificaciones
- Velocidad RelativaDocumento7 páginasVelocidad RelativaIvan ZetinaAún no hay calificaciones
- Parte5Documento17 páginasParte5Sebastian FSAún no hay calificaciones
- Movimiento RelativoDocumento12 páginasMovimiento RelativoJessicaParra15Aún no hay calificaciones
- Movimiento RelativoDocumento7 páginasMovimiento RelativoAliAún no hay calificaciones
- Velocidad física vectorialDocumento4 páginasVelocidad física vectorialJose Bolivar YtalianoAún no hay calificaciones
- Velocidad RelativaDocumento19 páginasVelocidad RelativaRuddy MoranteAún no hay calificaciones
- Elemento de ReferenciaDocumento1 páginaElemento de ReferenciaBetzyt Benitez LopezAún no hay calificaciones
- Velocidad RelativaDocumento4 páginasVelocidad RelativaAnthony CerdasAún no hay calificaciones
- VelocidadDocumento5 páginasVelocidadsolcito_ceballosAún no hay calificaciones
- Movimiento RelativoDocumento4 páginasMovimiento RelativoFranklin de la Cruz0% (1)
- Análisis CríticoDocumento8 páginasAnálisis CríticoEliMagoAún no hay calificaciones
- Cinemática Del Movimiento RelativoDocumento30 páginasCinemática Del Movimiento RelativoSeba MartinezAún no hay calificaciones
- 3 Hidrocinemática 20Documento15 páginas3 Hidrocinemática 20IvanAún no hay calificaciones
- Movimiento relativo y sistemas de referenciaDocumento8 páginasMovimiento relativo y sistemas de referenciaAlfonso CamarilloAún no hay calificaciones
- Tema 1Documento96 páginasTema 1DuskyPigAún no hay calificaciones
- Velocidad RelativaDocumento8 páginasVelocidad Relativaivanova_anna3562100% (1)
- MovRelSisRefTraslacionDocumento11 páginasMovRelSisRefTraslacionRaulito CortesAún no hay calificaciones
- Movimiento RelativoDocumento5 páginasMovimiento RelativoWilliam's Mamani MancillaAún no hay calificaciones
- Velocidad - Wikipedia, La Enciclopedia LibreDocumento54 páginasVelocidad - Wikipedia, La Enciclopedia Librebrayansira04Aún no hay calificaciones
- Cinemática de partículas: posición, velocidad y aceleraciónDocumento29 páginasCinemática de partículas: posición, velocidad y aceleraciónF Morales Medeles67% (3)
- Descripciones Eulerianas y Lagrangianas en Mecánica de FluidosDocumento6 páginasDescripciones Eulerianas y Lagrangianas en Mecánica de FluidosFernando LeónAún no hay calificaciones
- Mecánica de Fluidos I - Sesión 7Documento28 páginasMecánica de Fluidos I - Sesión 7Diego Martínez MAún no hay calificaciones
- Aceleración de CoriolisDocumento20 páginasAceleración de CoriolisJaime Eduardo Alvarez BaronAún no hay calificaciones
- FisicaDocumento2 páginasFisicaAnonymous sgVbpQAún no hay calificaciones
- Unidad 2 - Cinemática de La PartículaDocumento21 páginasUnidad 2 - Cinemática de La PartículaEduardo VacaAún no hay calificaciones
- Relatividad NewtonianaDocumento20 páginasRelatividad NewtonianaGEANPIERRE ENRIQUE MAURICIO CASTROAún no hay calificaciones
- Introducción A La CinemáticaDocumento10 páginasIntroducción A La CinemáticaOlber TiconaAún no hay calificaciones
- Cinematica InicialDocumento24 páginasCinematica InicialFausto GamboaAún no hay calificaciones
- Introducción y Marco TeoricoDocumento5 páginasIntroducción y Marco TeoricoAmadeus Edgar Castillo GarciaAún no hay calificaciones
- Cinematic ADocumento124 páginasCinematic AJ Lam AyMo94% (17)
- Elementos Básicos de La CinemáticaDocumento9 páginasElementos Básicos de La CinemáticasergioabelramirezzapAún no hay calificaciones
- Temas Selectos de Física: Movimiento, Velocidad y AceleraciónDocumento10 páginasTemas Selectos de Física: Movimiento, Velocidad y AceleraciónMiicheel VillaseeñorAún no hay calificaciones
- Movimiento Relativo ElvisDocumento16 páginasMovimiento Relativo Elviscarlos romeroAún no hay calificaciones
- 005 Introducción A La Cinemática de Fluidos PDFDocumento18 páginas005 Introducción A La Cinemática de Fluidos PDFWilliam Vilca100% (1)
- IntroduccionDocumento5 páginasIntroduccionOswaldo Cuatecontzi TlilayatziAún no hay calificaciones
- Qué Es Cinemática ForoDocumento6 páginasQué Es Cinemática ForoRoselyn AlcantaraAún no hay calificaciones
- IV Unidad El MovimientoDocumento9 páginasIV Unidad El MovimientoJoseph HernandezAún no hay calificaciones
- CinemáticaDocumento11 páginasCinemáticajuanvhoccAún no hay calificaciones
- Cinematica FisicaDocumento24 páginasCinematica FisicaManuel Angelo Rafaile AcostaAún no hay calificaciones
- Cinemática: Representación de La de Una Partícula (Verde), Mostrando La (Azul) en Un Momento Dado de Dicha TrayectoriaDocumento10 páginasCinemática: Representación de La de Una Partícula (Verde), Mostrando La (Azul) en Un Momento Dado de Dicha TrayectoriaAMAURY LOPEZ JIMENEZAún no hay calificaciones
- Vel Relativa y Centros InstantaneosDocumento4 páginasVel Relativa y Centros InstantaneosFlores Rodiguez Johan AlexisAún no hay calificaciones
- Campo de AceleracionDocumento2 páginasCampo de AceleracionFranco DarioAún no hay calificaciones
- Investigacion DinamicaDocumento16 páginasInvestigacion Dinamicajose Gerardo RamirezAún no hay calificaciones
- Velocidad Relativa DDDDDDocumento48 páginasVelocidad Relativa DDDDDAlizon Valencia ChuraAún no hay calificaciones
- Cinemática Fisica LabDocumento3 páginasCinemática Fisica LabJoseAún no hay calificaciones
- Definición y Ejemplo de Sistema o Marco de ReferenciaDocumento13 páginasDefinición y Ejemplo de Sistema o Marco de ReferenciaLuis Yoani Berrio CardonaAún no hay calificaciones
- Analisis de Las Aceleraciones de Un MecanismoDocumento15 páginasAnalisis de Las Aceleraciones de Un MecanismoCarlos Gonzalez100% (1)
- Movimiento curvilíneo de partículas UNLA Facultad Energía e IndustriasDocumento12 páginasMovimiento curvilíneo de partículas UNLA Facultad Energía e IndustriasFrancis Paul Correa GironAún no hay calificaciones
- Descripciones Lagrangianas y Eulerianas Del MovimientoDocumento4 páginasDescripciones Lagrangianas y Eulerianas Del MovimientoEstefano Salazar ChavezAún no hay calificaciones
- Movimiento Rectilíneo UniformeDocumento25 páginasMovimiento Rectilíneo UniformeKamila LeuroAún no hay calificaciones
- Unidad 1 RossyDocumento16 páginasUnidad 1 RossyjesusAún no hay calificaciones
- Movimiento y sus componentes enDocumento6 páginasMovimiento y sus componentes enRuben MendezAún no hay calificaciones
- 2 - Mecanica OrbitalDocumento22 páginas2 - Mecanica OrbitalRobertoAún no hay calificaciones
- ACELERACIONDocumento6 páginasACELERACIONjosefa reyesAún no hay calificaciones
- Temario Lengua Castellana y Literatura Grado Superior Castilla y LeonDocumento3 páginasTemario Lengua Castellana y Literatura Grado Superior Castilla y LeonlincecitaAún no hay calificaciones
- Temario Quimica Grado Superior Castilla y LeonDocumento3 páginasTemario Quimica Grado Superior Castilla y LeonlincecitaAún no hay calificaciones
- Temario Lengua Extranjera Ingles Frances Grado Superior Castilla y LeonDocumento3 páginasTemario Lengua Extranjera Ingles Frances Grado Superior Castilla y LeonlincecitaAún no hay calificaciones
- FUNCIONDEONDADocumento4 páginasFUNCIONDEONDAlincecitaAún no hay calificaciones
- Temario Biologia Grado Superior Castilla y LeonDocumento4 páginasTemario Biologia Grado Superior Castilla y LeonlincecitaAún no hay calificaciones
- B2 MCS U14 R Intervalos-De-ConfianzaDocumento1 páginaB2 MCS U14 R Intervalos-De-ConfianzalincecitaAún no hay calificaciones
- Diagrama de FasesDocumento5 páginasDiagrama de Faseslincecita100% (1)
- Temario Educacion Fisica Grado Superior Castilla y LeonDocumento2 páginasTemario Educacion Fisica Grado Superior Castilla y LeonlincecitaAún no hay calificaciones
- B2 MCS U13 Er El-Muestreo-EstadisticoDocumento2 páginasB2 MCS U13 Er El-Muestreo-EstadisticolincecitaAún no hay calificaciones
- GASESDocumento41 páginasGASESlincecitaAún no hay calificaciones
- B2 MCS U12 Er Distribuciones-Binomial-Y-NormalDocumento2 páginasB2 MCS U12 Er Distribuciones-Binomial-Y-NormallincecitaAún no hay calificaciones
- Pau Sept17 QuimicaDocumento2 páginasPau Sept17 QuimicalincecitaAún no hay calificaciones
- RENTASDocumento13 páginasRENTASlincecitaAún no hay calificaciones
- B2 MCS U12 R Distribuciones-Binomial-Y-NormalDocumento1 páginaB2 MCS U12 R Distribuciones-Binomial-Y-NormallincecitaAún no hay calificaciones
- B2 MCS U15 Er Contraste-De-HipotesisDocumento2 páginasB2 MCS U15 Er Contraste-De-HipotesislincecitaAún no hay calificaciones
- Capitalizacion SimpleDocumento10 páginasCapitalizacion Simplelincecita0% (1)
- Rentas ConstantesDocumento16 páginasRentas ConstanteslincecitaAún no hay calificaciones
- Pau Sept15 QuimicaDocumento2 páginasPau Sept15 QuimicalincecitaAún no hay calificaciones
- UNIVERSIDADES DE CASTILLA-LEÓN/P.A.U.–LOGSE–SEPTIEMBRE 2012/ENUNCIADOS OPCIÓN ADocumento2 páginasUNIVERSIDADES DE CASTILLA-LEÓN/P.A.U.–LOGSE–SEPTIEMBRE 2012/ENUNCIADOS OPCIÓN AlincecitaAún no hay calificaciones
- Pau Sept13 QuimicaDocumento2 páginasPau Sept13 QuimicalincecitaAún no hay calificaciones
- Pau Castilla y Leon 04Documento2 páginasPau Castilla y Leon 04lincecitaAún no hay calificaciones
- Pau Castilla y Leon 17Documento2 páginasPau Castilla y Leon 17lincecitaAún no hay calificaciones
- Pau Sept14 QuimicaDocumento2 páginasPau Sept14 QuimicalincecitaAún no hay calificaciones
- Capitalizacion CompuestaDocumento8 páginasCapitalizacion CompuestalincecitaAún no hay calificaciones
- Pau Castilla y Leon 16Documento2 páginasPau Castilla y Leon 16lincecitaAún no hay calificaciones
- Pau Castilla y Leon 03Documento2 páginasPau Castilla y Leon 03lincecitaAún no hay calificaciones
- Oj - 2009 CFGS Química - JunioDocumento3 páginasOj - 2009 CFGS Química - JunioAscension Sabater PalazonAún no hay calificaciones
- Dinamica ResueltosDocumento9 páginasDinamica ResueltoslincecitaAún no hay calificaciones
- Pau Castilla y Leon 05Documento2 páginasPau Castilla y Leon 05lincecitaAún no hay calificaciones
- Tipos de Iluminacion SubterraneaDocumento30 páginasTipos de Iluminacion SubterraneaCHRISTIANAún no hay calificaciones
- Raiz CuadradaDocumento12 páginasRaiz CuadradaGuillermoAún no hay calificaciones
- Fisicoquimica 1Documento13 páginasFisicoquimica 1Anonymous 1lrzMT1nAún no hay calificaciones
- Análisis Físico RocasDocumento16 páginasAnálisis Físico RocasEusebio MarvalAún no hay calificaciones
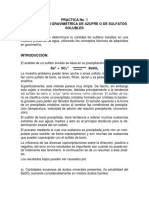
- Gravimetria Agua FinalDocumento6 páginasGravimetria Agua Finalanon_523519677Aún no hay calificaciones
- Cifras SignificativasDocumento2 páginasCifras SignificativasEduardo MedinaAún no hay calificaciones
- Determinación de pureza químicaDocumento10 páginasDeterminación de pureza químicaNelly RobertoAún no hay calificaciones
- Los Primeros Numeros PDFDocumento7 páginasLos Primeros Numeros PDFtarenrAún no hay calificaciones
- Estudio EconomicoDocumento208 páginasEstudio EconomicohenryAún no hay calificaciones
- Álgebra 201 Sel. SecDocumento58 páginasÁlgebra 201 Sel. Secsolesito2412100% (1)
- Negociación creativa en la agriculturaDocumento22 páginasNegociación creativa en la agriculturaJose MartinezAún no hay calificaciones
- Ma264 - Clase Integradora PC1Documento4 páginasMa264 - Clase Integradora PC1Miguel ZackAún no hay calificaciones
- Examen parcial de Dinámica 2020Documento4 páginasExamen parcial de Dinámica 2020Ismael Chambilla C.Aún no hay calificaciones
- Microscopio óptico compuesto partesDocumento4 páginasMicroscopio óptico compuesto partesJACKELINE ROSMERY DONAYRE RODRIGUEZAún no hay calificaciones
- Manual AkronDocumento146 páginasManual AkronJean Jose Morillo Añez100% (1)
- Clase04 463217183Documento12 páginasClase04 463217183Oriana SerratoAún no hay calificaciones
- Ciencias Fisicas YaniryDocumento9 páginasCiencias Fisicas YaniryJunior NickAún no hay calificaciones
- Laboratorio 12 - INFORME TECNICODocumento4 páginasLaboratorio 12 - INFORME TECNICOCriz Yoselin Laurencio MamaniAún no hay calificaciones
- Libro Del Arcangel MiguelDocumento134 páginasLibro Del Arcangel MiguelMarcelo Vásquez100% (1)
- Practica 10 ORGANICADocumento7 páginasPractica 10 ORGANICASarahi GuillenAún no hay calificaciones
- Demostraciones 1Documento4 páginasDemostraciones 1Alejandra CaizaluisaAún no hay calificaciones
- Guia Impresora 3DDocumento30 páginasGuia Impresora 3DMarcoPozoAún no hay calificaciones
- Taller 2 FluidosDocumento2 páginasTaller 2 FluidosMarlin BenjumeaAún no hay calificaciones
- La TermodinamicaDocumento31 páginasLa TermodinamicaSUGEY HEYDI CALLO HUANACOAún no hay calificaciones
- Ficha Termometro DigitalDocumento1 páginaFicha Termometro Digitalshamir Rivera MejiaAún no hay calificaciones
- Conceptos básicos de mecanismos y diagramas cinemáticosDocumento56 páginasConceptos básicos de mecanismos y diagramas cinemáticosAnderson RamirezAún no hay calificaciones
- ROCA - Calderas GasoilDocumento7 páginasROCA - Calderas GasoileloyrodoAún no hay calificaciones
- Evaluación Ergonómica de puestos de trabajo Check List OCRADocumento36 páginasEvaluación Ergonómica de puestos de trabajo Check List OCRAMAX DUGLAS MEJIA DOMINGUEZAún no hay calificaciones
- Unidad 1 Act 2 ForoDocumento6 páginasUnidad 1 Act 2 ForoANDREA PAOLA GARCIA OJEDA -Estudiante virtualAún no hay calificaciones
- La revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaDe EverandLa revolución de la glucosa: Equilibra tus niveles de glucosa y cambiarás tu salud y tu vidaCalificación: 5 de 5 estrellas5/5 (200)
- Batidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoDe EverandBatidos Verdes Depurativos y Antioxidantes: Aumenta tu Vitalidad con Smoothie Detox Durante 10 Días Para Adelgazar y Bajar de Peso: Aumenta tu vitalidad con smoothie detox durante 10 días para adelgazar y bajar de pesoCalificación: 5 de 5 estrellas5/5 (2)
- Interpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasDe EverandInterpretación del ECG: Una Guía Práctica e Intuitiva para Aprender a Leer el ECG y Diagnosticar y Tratar ArritmiasAún no hay calificaciones
- Disciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreDe EverandDisciplina Mental: Técnicas infalibles para lograr todo lo que te propones y eliminar la pereza y la procrastinación de tu vida para siempreCalificación: 5 de 5 estrellas5/5 (3)
- Zensorialmente : Dejá que tu cuerpo sea tu cerebroDe EverandZensorialmente : Dejá que tu cuerpo sea tu cerebroAún no hay calificaciones
- Prescripción de ejercico físico para la saludDe EverandPrescripción de ejercico físico para la saludCalificación: 5 de 5 estrellas5/5 (1)
- Reconstrucción de dientes endodonciados: Pautas de actuación clínicaDe EverandReconstrucción de dientes endodonciados: Pautas de actuación clínicaCalificación: 5 de 5 estrellas5/5 (4)
- Anatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasDe EverandAnatomía & 100 estiramientos Esenciales (Color): Técnicas, beneficios, precauciones, consejos, tablas de series, dolenciasCalificación: 4.5 de 5 estrellas4.5/5 (21)
- La metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceDe EverandLa metamedicina. Cada síntoma es un mensaje: La curación a tu alcanceCalificación: 5 de 5 estrellas5/5 (8)
- Fisiopatología de las enfermedades cardiovascularesDe EverandFisiopatología de las enfermedades cardiovascularesCalificación: 5 de 5 estrellas5/5 (1)
- El péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaDe EverandEl péndulo de sanación: Péndulo hebreo. Investigación y sistematización de la técnicaCalificación: 4.5 de 5 estrellas4.5/5 (27)
- Desastres y emergencias. Prevención, mitigación y preparaciónDe EverandDesastres y emergencias. Prevención, mitigación y preparaciónCalificación: 4 de 5 estrellas4/5 (5)
- Teoría de juegos: Una introducción matemática a la toma de decisionesDe EverandTeoría de juegos: Una introducción matemática a la toma de decisionesCalificación: 4 de 5 estrellas4/5 (1)
- La vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizDe EverandLa vibración de las ondas cerebrales: Recuperar el ritmo de una vida saludable y felizCalificación: 5 de 5 estrellas5/5 (7)
- Neurociencia para vencer la depresión: La esprial ascendenteDe EverandNeurociencia para vencer la depresión: La esprial ascendenteCalificación: 4.5 de 5 estrellas4.5/5 (10)
- El libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)De EverandEl libro conciso de la punción seca: Manual del terapeuta para las aplicaciones en los puntos gatillo miofasciales (Color)Calificación: 3 de 5 estrellas3/5 (2)
- Neuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaDe EverandNeuroanatomía: Fundamentos de neuroanatomía estructural, funcional y clínicaCalificación: 4 de 5 estrellas4/5 (16)
- Dieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasDe EverandDieta Para El Reflujo Biliar y Gastritis Alcalina - Incluye 20 Deliciosas Recetas Libres de Gluten y de Lácteos Para Tratar y Aliviar el Reflujo Biliar y Sus Molestos SíntomasCalificación: 4 de 5 estrellas4/5 (9)
- Trucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasDe EverandTrucos para Leer la Mente de los Demás: Cómo Adivinar el Pensamiento de los Demás con Poco Esfuerzo. 2 Libros en 1 - Secretos de la Psicología Oscura, Cómo ser un Detector de MentirasCalificación: 4.5 de 5 estrellas4.5/5 (3)