También podría gustarte
- AMOR Y RESPETO EstudioDocumento41 páginasAMOR Y RESPETO EstudioJohnny Madriz AlvaradoAún no hay calificaciones
- La Casa VIII en AstrologiaDocumento3 páginasLa Casa VIII en AstrologiaBaptiste Lebras - CEIAAún no hay calificaciones
- Capitulo 8 Marcos y Bast Id Ores CORREGIDODocumento42 páginasCapitulo 8 Marcos y Bast Id Ores CORREGIDOjhordyAún no hay calificaciones
- Material-De-Estudio Ejercicios-De-Examenes-Anteriores Ejercicios de Examenes Ed 1 JMDocumento67 páginasMaterial-De-Estudio Ejercicios-De-Examenes-Anteriores Ejercicios de Examenes Ed 1 JMJuan GAAún no hay calificaciones
- Teoria de DesicionesDocumento137 páginasTeoria de DesicionesFelix Tolentino A75% (4)
- Nch3241 2017Documento75 páginasNch3241 2017Ricardo Lopez LopezAún no hay calificaciones
- Separacion Convencional y Divorcio UlteriorDocumento30 páginasSeparacion Convencional y Divorcio UlteriorPedro Alarcón FloresAún no hay calificaciones
- La ecuación general de segundo grado en dos y tres variablesDe EverandLa ecuación general de segundo grado en dos y tres variablesAún no hay calificaciones
- RM1 Clase 07 - Esfuerzo y Deformación. Carga Axial (4) - vPAIDEIADocumento42 páginasRM1 Clase 07 - Esfuerzo y Deformación. Carga Axial (4) - vPAIDEIANilton AbAún no hay calificaciones
- D2 A2 FICHA REL. Imitamos A La Sagrada FamiliaDocumento2 páginasD2 A2 FICHA REL. Imitamos A La Sagrada FamiliaSONIA JELLYBEAN LA ROSA AGUILARAún no hay calificaciones
- Ejercicio VariableDocumento5 páginasEjercicio VariableRicardo Lopez LopezAún no hay calificaciones
- Modulo Ii Miembros Cargados Axialmente PDFDocumento15 páginasModulo Ii Miembros Cargados Axialmente PDFAntonio Favio OspinoAún no hay calificaciones
- Armaduras Método de Los CortesDocumento13 páginasArmaduras Método de Los CortesAndrea RodriguezAún no hay calificaciones
- 3er Simulacro Viernes 2 Julio Preguntas Sin Clave Prueba de ConocimientosDocumento6 páginas3er Simulacro Viernes 2 Julio Preguntas Sin Clave Prueba de ConocimientosEstrella BendezuAún no hay calificaciones
- Ejercicio MecanicaDocumento5 páginasEjercicio MecanicaOrlando Ruiz HamesterAún no hay calificaciones
- Trabajo Encargado 1Documento3 páginasTrabajo Encargado 1Del Piero RodríguezAún no hay calificaciones
- 232 Integral 2010-1Documento7 páginas232 Integral 2010-1lainelvidalpAún no hay calificaciones
- Práctica Dirigida de Física Trabajo Mecanico: V C TeDocumento3 páginasPráctica Dirigida de Física Trabajo Mecanico: V C TeEsteban TerrazasAún no hay calificaciones
- ENTREPISODocumento7 páginasENTREPISOdiana luzAún no hay calificaciones
- Taller No1 - Métodos de Energía Isostáticos - Análisis Matricial de EstructurasDocumento22 páginasTaller No1 - Métodos de Energía Isostáticos - Análisis Matricial de EstructurasCristian PalaciosAún no hay calificaciones
- Sesiones #05Documento3 páginasSesiones #05ober zelaAún no hay calificaciones
- Prmec Et001Documento3 páginasPrmec Et001Matematica Fisica EstadisticaAún no hay calificaciones
- Ejemplos 4Documento9 páginasEjemplos 4ian XDAún no hay calificaciones
- Wuolah Free Examen Junio2015Documento3 páginasWuolah Free Examen Junio2015David VictoresAún no hay calificaciones
- 5.00 Prob. Estatic. IndeterminadosDocumento6 páginas5.00 Prob. Estatic. IndeterminadosLuis L. FalconAún no hay calificaciones
- Ing135 2021 0 PC1Documento3 páginasIng135 2021 0 PC1Jovan Guns GunsAún no hay calificaciones
- Fisica 14 Termo MaquinasDocumento6 páginasFisica 14 Termo MaquinasSebastian Chaca CapchaAún no hay calificaciones
- Apuntes Fisica Fcs PDFDocumento110 páginasApuntes Fisica Fcs PDFManuel A. CaipeAún no hay calificaciones
- Seminario FísicaDocumento4 páginasSeminario FísicaEnrique YoplaAún no hay calificaciones
- Esfuerzo AxialDocumento23 páginasEsfuerzo AxialEstephanie AVAún no hay calificaciones
- Parcial 2011 IIDocumento5 páginasParcial 2011 IIbrayan cruzAún no hay calificaciones
- Ejemplos Méc. MaterialesDocumento9 páginasEjemplos Méc. Materialesian XDAún no hay calificaciones
- Quinto - Sesion 01 - Ficha Trabajo Potencia y Energia Mecanica - Iii BimestreDocumento6 páginasQuinto - Sesion 01 - Ficha Trabajo Potencia y Energia Mecanica - Iii BimestreRodrigo CollantesAún no hay calificaciones
- F Sem 5Documento4 páginasF Sem 5Fernando ApazaAún no hay calificaciones
- 14 Vigas ReforzadasDocumento7 páginas14 Vigas ReforzadasCarlos Brayan Curi QuilcaAún no hay calificaciones
- Informe de Estatica Borrador OriginalDocumento10 páginasInforme de Estatica Borrador OriginalnikorasunihongoAún no hay calificaciones
- Trabajo AutonomoDocumento5 páginasTrabajo AutonomoAllen Ivana Cardenas CurzAún no hay calificaciones
- Tarea 02Documento4 páginasTarea 02William AvilaAún no hay calificaciones
- PC 1 21-0Documento3 páginasPC 1 21-0Fabrizzio LeonAún no hay calificaciones
- Dic2012-Física IDocumento3 páginasDic2012-Física ISabela FernándezAún no hay calificaciones
- Discusión 05-2019Documento2 páginasDiscusión 05-2019Carlos España100% (1)
- Tarea 2Documento2 páginasTarea 2Erick NavarroAún no hay calificaciones
- Problemas Propuestos 1 PDFDocumento1 páginaProblemas Propuestos 1 PDFKurlan RonaldAún no hay calificaciones
- 2º Ley de NewtonDocumento8 páginas2º Ley de NewtonkevinAún no hay calificaciones
- Analisis de Estructuras Semestre I - 2010 Certamen 3 PROBLEMA 1 (50 Puntos)Documento8 páginasAnalisis de Estructuras Semestre I - 2010 Certamen 3 PROBLEMA 1 (50 Puntos)Jake SHAún no hay calificaciones
- 211 212Documento3 páginas211 212Marco A. Ch PerezAún no hay calificaciones
- 211 212Documento3 páginas211 212Marco A. Ch PerezAún no hay calificaciones
- Exam Final 2021-1 MC361Documento2 páginasExam Final 2021-1 MC361ENRIQUE MIJAEL ALCARRAZ COLCAAún no hay calificaciones
- Practica 1Documento4 páginasPractica 1Zurita YoselinAún no hay calificaciones
- Cap 4 Modos y Criterios de Falla (D) Versión 2015Documento43 páginasCap 4 Modos y Criterios de Falla (D) Versión 2015Wilmer Calle CruzAún no hay calificaciones
- Acosta Martinez Marianela AlondraDocumento9 páginasAcosta Martinez Marianela AlondraRolando Javier MendozaAún no hay calificaciones
- 4 Calculo de Las Deformaciones en Puentes de Voladizos Sucesivos Hormigonados in SituDocumento26 páginas4 Calculo de Las Deformaciones en Puentes de Voladizos Sucesivos Hormigonados in SituAriel ARAún no hay calificaciones
- Estatica I (Problemas)Documento4 páginasEstatica I (Problemas)Quinta Cuyeria Sebastian Sarsas ChicharronesAún no hay calificaciones
- PD F - Semestral Uni 05Documento9 páginasPD F - Semestral Uni 05Margarita Alvarez HuapayaAún no hay calificaciones
- Trabajos Practicos #8 Solicitación AxialDocumento5 páginasTrabajos Practicos #8 Solicitación AxialMaxi ZoratAún no hay calificaciones
- Examen SustitutorioDocumento3 páginasExamen SustitutoriocarlosAún no hay calificaciones
- 04 Diagramas Momento Curvatura - Vigas Con Armadura A TracciónDocumento5 páginas04 Diagramas Momento Curvatura - Vigas Con Armadura A TracciónVivian AguirreAún no hay calificaciones
- Prácticos R2 Pablo MDocumento187 páginasPrácticos R2 Pablo Mmajisvar1Aún no hay calificaciones
- Unidad 4 - Discusión 4 SOLUCIÓNDocumento9 páginasUnidad 4 - Discusión 4 SOLUCIÓNRena Brego100% (1)
- Repaso pc1Documento6 páginasRepaso pc1RengifoAún no hay calificaciones
- F RUNI Diri Sem2 Version2Documento4 páginasF RUNI Diri Sem2 Version2Dilmer VelasquezAún no hay calificaciones
- Trabajo Academico AnalisisDocumento1 páginaTrabajo Academico AnalisisRonald GamarraAún no hay calificaciones
- Wuolah-Free-12-13 PROBLEMAS RESUELTOS ELASTICIDAD-gulag-freeDocumento106 páginasWuolah-Free-12-13 PROBLEMAS RESUELTOS ELASTICIDAD-gulag-freefranjhtAún no hay calificaciones
- Conservacion de La EnergiaDocumento4 páginasConservacion de La EnergiaJhoseeff Rodriguez SacaAún no hay calificaciones
- Tarea Domiciliaria de Trabajo y PotenciaDocumento2 páginasTarea Domiciliaria de Trabajo y PotenciaYoel ArteagaAún no hay calificaciones
- Informe 1Documento4 páginasInforme 1Ricardo Lopez Lopez0% (1)
- Repaso de Esta TicaDocumento14 páginasRepaso de Esta TicaRicardo Lopez LopezAún no hay calificaciones
- PEP II - TermodinamicaDocumento2 páginasPEP II - TermodinamicaRicardo Lopez LopezAún no hay calificaciones
- CastiglianoDocumento14 páginasCastiglianoRicardo Lopez LopezAún no hay calificaciones
- Clase 4 - Ley de HookeDocumento20 páginasClase 4 - Ley de HookeRicardo Lopez LopezAún no hay calificaciones
- Clase 3 - DeformaciónDocumento32 páginasClase 3 - DeformaciónRicardo Lopez LopezAún no hay calificaciones
- Clase 1 - Esfuerzos NormalesDocumento20 páginasClase 1 - Esfuerzos NormalesRicardo Lopez Lopez100% (1)
- Clase 2 - Esfuerzo de Corte y AplastamientoDocumento18 páginasClase 2 - Esfuerzo de Corte y AplastamientoRicardo Lopez LopezAún no hay calificaciones
- Ficha Diptongos e Hiatos en Un TextoDocumento5 páginasFicha Diptongos e Hiatos en Un Textosg6144353Aún no hay calificaciones
- Taller - 1 - RedacciónDocumento7 páginasTaller - 1 - Redacciónkiricu dominguezAún no hay calificaciones
- Tesis de Automatizacion, Control.... C-11 ExamenDocumento11 páginasTesis de Automatizacion, Control.... C-11 ExamenElmer QuispeAún no hay calificaciones
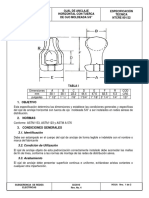
- 22ojal de Anclaje HorizontalDocumento2 páginas22ojal de Anclaje HorizontalRené Luis Perez MagneAún no hay calificaciones
- Capítulo2 - Estudio de CortocircuitoDocumento25 páginasCapítulo2 - Estudio de CortocircuitoAlfredo Barzola RamirezAún no hay calificaciones
- 3 Silabo de Autocad Basico 2014Documento4 páginas3 Silabo de Autocad Basico 2014Coquin Ant100% (1)
- Estimulacion Ritmica Del Corazon)Documento26 páginasEstimulacion Ritmica Del Corazon)Wamppy ZOmbiiee100% (2)
- Probabilidad en La Ingeniería ElectrónicaDocumento17 páginasProbabilidad en La Ingeniería ElectrónicaLuis Alejandro PascuazaAún no hay calificaciones
- El Plan de Cuentas - ContabilidadDocumento5 páginasEl Plan de Cuentas - ContabilidadDiego Andres Gonzalez DiazAún no hay calificaciones
- Breinner Pérez Olmos 22Documento8 páginasBreinner Pérez Olmos 22Acom OlmosAún no hay calificaciones
- Informe de Laboratorio N 04Documento8 páginasInforme de Laboratorio N 04Marcelito Chino VilcaAún no hay calificaciones
- Manualidades LamparasDocumento4 páginasManualidades LamparasyetraAún no hay calificaciones
- Catálogo de AmwayDocumento102 páginasCatálogo de AmwayEstefanía Zárate AngaritaAún no hay calificaciones
- Desarrollo de FormulasDocumento6 páginasDesarrollo de FormulasRichard Gonzalo YtoAún no hay calificaciones
- Horas de LuchaDocumento15 páginasHoras de LuchaJosé PorrasAún no hay calificaciones
- Qué Es El CurriculumDocumento8 páginasQué Es El CurriculumflorenciaAún no hay calificaciones
- Tricalc - Calculo Sismorresistente de Muros de Termoarcilla Con El Programa CMTDocumento22 páginasTricalc - Calculo Sismorresistente de Muros de Termoarcilla Con El Programa CMTEduardo DíezAún no hay calificaciones
- InvestigaciónDocumento10 páginasInvestigaciónKevin RodriguezAún no hay calificaciones
- Examen N 3Documento1 páginaExamen N 3Perla VillegasAún no hay calificaciones
- Modelo Político de Toma de DecisionesDocumento5 páginasModelo Político de Toma de DecisionesMagdiel HernándezAún no hay calificaciones
- Resolución Tecdmx Jel 328 2021Documento65 páginasResolución Tecdmx Jel 328 2021transparencia publicaAún no hay calificaciones
- Ventajas y Desventajas de La Dieta MeditDocumento5 páginasVentajas y Desventajas de La Dieta MeditRonald Gustavo Yaguno QuecaraAún no hay calificaciones
- Gavac-Control Garrapatas-Hector MachadoDocumento23 páginasGavac-Control Garrapatas-Hector MachadoAnthony CarreraAún no hay calificaciones
- CLASES 4 BASES SALUD OCUPACIONAL EnfermeriaDocumento24 páginasCLASES 4 BASES SALUD OCUPACIONAL EnfermeriaRocio Judith Peralta MoraAún no hay calificaciones
- Tema 12 ChinaDocumento39 páginasTema 12 ChinaFeliciano Gámez DuarteAún no hay calificaciones