También podría gustarte
- Guía Cálculo II - 1-2020Documento127 páginasGuía Cálculo II - 1-2020Jose RengifoAún no hay calificaciones
- Examen de admisión de álgebra lineal, ecuaciones diferenciales y análisisDocumento3 páginasExamen de admisión de álgebra lineal, ecuaciones diferenciales y análisisManuel2759Aún no hay calificaciones
- Taller 1 - EDO de Orden UnoDocumento3 páginasTaller 1 - EDO de Orden UnoFelipe VelascoAún no hay calificaciones
- UntitledDocumento4 páginasUntitledFausto CalcagnoAún no hay calificaciones
- Taller 1 (Definiciones y Terminología)Documento3 páginasTaller 1 (Definiciones y Terminología)LUIS CAMILO INGUILÁN RODRÍGUEZAún no hay calificaciones
- Examen de ingreso a la Maestría en MatemáticasDocumento42 páginasExamen de ingreso a la Maestría en MatemáticasManuel2759Aún no hay calificaciones
- PR Actica 4 - Ecuaciones Diferenciales-: C Alculo I - Ecyt - Unsam Segundo Cuatrimestre de 2022Documento5 páginasPR Actica 4 - Ecuaciones Diferenciales-: C Alculo I - Ecyt - Unsam Segundo Cuatrimestre de 2022fernanda da silvaAún no hay calificaciones
- Matematicas para QuimicaDocumento2 páginasMatematicas para QuimicamilagrosAún no hay calificaciones
- Frobenius 167 170 PDFDocumento4 páginasFrobenius 167 170 PDFDavid Ricardo Gamboa ArayaAún no hay calificaciones
- ExamenResuelto 3 Junio 2021Documento6 páginasExamenResuelto 3 Junio 2021Héctor M. MorteAún no hay calificaciones
- Guia para El Control 1Documento5 páginasGuia para El Control 1benjaminAún no hay calificaciones
- Serie 1Documento5 páginasSerie 1Brayan RamirezAún no hay calificaciones
- Practica IEDODocumento2 páginasPractica IEDOcarpediemfg11Aún no hay calificaciones
- Ex Amenes Rec Ient EsDocumento4 páginasEx Amenes Rec Ient EscarinogecAún no hay calificaciones
- 1 Edo - 2020 - BDocumento7 páginas1 Edo - 2020 - BSebas BunnyAún no hay calificaciones
- Problemas para EstudiarDocumento7 páginasProblemas para EstudiarJeisson Andrés Molano GuzmánAún no hay calificaciones
- 5 Edo TodoDocumento10 páginas5 Edo TodoAlba LemaAún no hay calificaciones
- TP 5 EdoDocumento10 páginasTP 5 EdoRolando LaimeAún no hay calificaciones
- EcuacionesDiferenciales-Práctico1Documento2 páginasEcuacionesDiferenciales-Práctico1Juan ViscaAún no hay calificaciones
- Taller 7 02 11Documento3 páginasTaller 7 02 11AndrésVeraAún no hay calificaciones
- Hoja03 LinealesDocumento7 páginasHoja03 LinealesJosé SalazarAún no hay calificaciones
- Ma4 em pr8 09Documento4 páginasMa4 em pr8 09José Olivier RománAún no hay calificaciones
- Practica 1Documento2 páginasPractica 1Mary OsunaAún no hay calificaciones
- Ed 8Documento2 páginasEd 8José Carlos Catacora CallizayaAún no hay calificaciones
- Complementos de MatemáticasDocumento5 páginasComplementos de Matemáticasjax21esAún no hay calificaciones
- Serieejercicios 1Documento6 páginasSerieejercicios 1DonGerardAún no hay calificaciones
- Taller 1 - EDODocumento3 páginasTaller 1 - EDOJefferson QuiguantarAún no hay calificaciones
- Taller 1 - EDODocumento3 páginasTaller 1 - EDOJosé DavidAún no hay calificaciones
- Control5 Cálculo2011 (ProfEugenioRivera)Documento4 páginasControl5 Cálculo2011 (ProfEugenioRivera)MILLAN, LUISAún no hay calificaciones
- Tarea 3Documento5 páginasTarea 3AlexanderEscalanteAún no hay calificaciones
- 2 AplicacionesDocumento3 páginas2 AplicacionesNicolette BelenAún no hay calificaciones
- Cuerpo ComplejosDocumento9 páginasCuerpo ComplejosjisusAún no hay calificaciones
- Seminario3 CB411 20 2Documento2 páginasSeminario3 CB411 20 2Josué MendozaAún no hay calificaciones
- Ed 6Documento1 páginaEd 6José Carlos Catacora CallizayaAún no hay calificaciones
- Examenes de AuxiliaturaDocumento8 páginasExamenes de AuxiliaturaSamy Laura Tapia CondoAún no hay calificaciones
- CL1 2022 Practico 12 IntegralesIIDocumento5 páginasCL1 2022 Practico 12 IntegralesII业余SanSebAún no hay calificaciones
- Pauta Control 1Documento5 páginasPauta Control 1Diego Francisco Brion OrellanaAún no hay calificaciones
- Lista de Ejercicios 3 Ecuaciones Diferenciales - UDDDocumento6 páginasLista de Ejercicios 3 Ecuaciones Diferenciales - UDDcindy embryAún no hay calificaciones
- p5Documento3 páginasp5Thiago Corte ArujAún no hay calificaciones
- Ecuaciones diferenciales de orden superiorDocumento13 páginasEcuaciones diferenciales de orden superiorJesus ValladaresAún no hay calificaciones
- TareaDocumento4 páginasTareaEmanuel Martínez FloresAún no hay calificaciones
- Guia 240304 110159Documento10 páginasGuia 240304 110159jorgecarmonaAún no hay calificaciones
- Notas - de - Clase 150411Documento74 páginasNotas - de - Clase 150411carovecchiocAún no hay calificaciones
- Ejercicios Resueltos de Ecuaciones DiferencialesDocumento26 páginasEjercicios Resueltos de Ecuaciones DiferencialesKarina Aguedo MillaAún no hay calificaciones
- GUIA 2 1s2019Documento3 páginasGUIA 2 1s2019Matias Gonzalez ZambranoAún no hay calificaciones
- Hoja01 ConceptosDocumento7 páginasHoja01 ConceptosLuis Alarcón PereroAún no hay calificaciones
- Solución de Una Ec. DiferencialDocumento13 páginasSolución de Una Ec. DiferencialJose De GraciaAún no hay calificaciones
- Tarea 5Documento2 páginasTarea 5I TellezAún no hay calificaciones
- Ed 1Documento2 páginasEd 1José Carlos Catacora CallizayaAún no hay calificaciones
- Análisis TP 10Documento3 páginasAnálisis TP 10Daniel LezcanoAún no hay calificaciones
- Cap8 Zegarra PucDocumento129 páginasCap8 Zegarra PucAlberto Rojas OlivaresAún no hay calificaciones
- Hoja03 LinealesDocumento7 páginasHoja03 LinealesКими БенальказарAún no hay calificaciones
- Álgebra. Capítuo 1. IntroducciónDocumento4 páginasÁlgebra. Capítuo 1. IntroducciónRuben FraguelAún no hay calificaciones
- Cálculo Diferencial e Integral III. Primavera 2020 Ejercicios Adicionales para El Primer Examen ParcialDocumento6 páginasCálculo Diferencial e Integral III. Primavera 2020 Ejercicios Adicionales para El Primer Examen ParcialuliqueAún no hay calificaciones
- Problemario de Calculo MultivariableDocumento10 páginasProblemario de Calculo MultivariableJosé A. MonjarazAún no hay calificaciones
- Ecuaciones Diferenciales IDocumento3 páginasEcuaciones Diferenciales IAgustinaGonzálezAún no hay calificaciones
- PD1 EdoDocumento3 páginasPD1 EdoFrank Charly AriasAún no hay calificaciones
- Taller Cálculo de Ecuaciones Diferenciales Sistemas de Ecuaciones DiferencialesDocumento4 páginasTaller Cálculo de Ecuaciones Diferenciales Sistemas de Ecuaciones DiferencialesRafael HCAún no hay calificaciones
- Semana 11 Ecuaciones Diferenciales - 2021-IDocumento27 páginasSemana 11 Ecuaciones Diferenciales - 2021-IJoaquin OtreraAún no hay calificaciones
- Drones y Usos de Drones para AerofotogrametríaDocumento3 páginasDrones y Usos de Drones para AerofotogrametríamartinAún no hay calificaciones
- Mecánica Clásica - Parcial 2: Ejercicios sobre barras, resortes y fuerzas centralesDocumento2 páginasMecánica Clásica - Parcial 2: Ejercicios sobre barras, resortes y fuerzas centralesJuan ViscaAún no hay calificaciones
- Dinámica de sistemas rígidos rotatoriosDocumento10 páginasDinámica de sistemas rígidos rotatoriosJuan ViscaAún no hay calificaciones
- Economía Derecho InstitucionesDocumento4 páginasEconomía Derecho InstitucionesJuan ViscaAún no hay calificaciones
- Ex Dic19 LetraDocumento3 páginasEx Dic19 LetraJuan ViscaAún no hay calificaciones
- Economía, Derecho e Instituciones EDIDocumento16 páginasEconomía, Derecho e Instituciones EDIJuan ViscaAún no hay calificaciones
- MClas PAR1 SOLDocumento3 páginasMClas PAR1 SOLJuan ViscaAún no hay calificaciones
- EcDi Practico06Documento1 páginaEcDi Practico06Juan ViscaAún no hay calificaciones
- Pye 2022 p2Documento2 páginasPye 2022 p2Juan ViscaAún no hay calificaciones
- Programa Economia FINGDocumento4 páginasPrograma Economia FINGJuan ViscaAún no hay calificaciones
- Mecánica Clásica - Soluciones Práctico 2Documento5 páginasMecánica Clásica - Soluciones Práctico 2Juan ViscaAún no hay calificaciones
- Primer Parcial.: Probabilidad y Estad Istica - 2017 Ciclo Inicial en Matem AticaDocumento3 páginasPrimer Parcial.: Probabilidad y Estad Istica - 2017 Ciclo Inicial en Matem AticaJuan ViscaAún no hay calificaciones
- MClas PAR1 2016Documento1 páginaMClas PAR1 2016Juan ViscaAún no hay calificaciones
- Binder 1Documento3 páginasBinder 1Juan ViscaAún no hay calificaciones
- EcDi Practico05Documento1 páginaEcDi Practico05Juan ViscaAún no hay calificaciones
- Práctico 2Documento8 páginasPráctico 2Juan ViscaAún no hay calificaciones
- Práctico 3 SolucionesDocumento4 páginasPráctico 3 SolucionesJuan ViscaAún no hay calificaciones
- EcDi Practico04Documento2 páginasEcDi Practico04Juan ViscaAún no hay calificaciones
- Protocolo Apertura de Cursos en EvaDocumento2 páginasProtocolo Apertura de Cursos en EvaJuan ViscaAún no hay calificaciones
- Binder 2Documento2 páginasBinder 2Juan ViscaAún no hay calificaciones
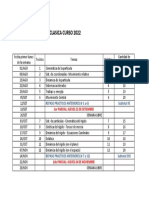
- Cronograma 2022Documento2 páginasCronograma 2022Juan ViscaAún no hay calificaciones
- Mecánica Newtoniana: Ejercicios de Dinámica de la PartículaDocumento9 páginasMecánica Newtoniana: Ejercicios de Dinámica de la PartículaJuan ViscaAún no hay calificaciones
- Solp 5Documento2 páginasSolp 5Juan ViscaAún no hay calificaciones
- Práctico 3Documento7 páginasPráctico 3Juan ViscaAún no hay calificaciones
- Apuntes MecNewtDocumento133 páginasApuntes MecNewtJuan ViscaAún no hay calificaciones
- Cronograma 2022Documento1 páginaCronograma 2022Juan ViscaAún no hay calificaciones
- Informacion General Curso 2022Documento3 páginasInformacion General Curso 2022Juan ViscaAún no hay calificaciones
- Practico 1 2020Documento6 páginasPractico 1 2020Juan ViscaAún no hay calificaciones
- Mecánica Clásica - ProgramaDocumento2 páginasMecánica Clásica - ProgramaJuan ViscaAún no hay calificaciones
- Solución Del Problema de Evaluación 2Documento5 páginasSolución Del Problema de Evaluación 2Juan ViscaAún no hay calificaciones
- ResumenDocumento2 páginasResumenJuan ViscaAún no hay calificaciones
- Guia 8Documento2 páginasGuia 8Eduard RamirezAún no hay calificaciones
- Número πDocumento27 páginasNúmero πFABIO RAFFOAún no hay calificaciones
- Tarea 2 MatematicaDocumento8 páginasTarea 2 MatematicaIvelisse JimenezAún no hay calificaciones
- Matematicas UniversitariasDocumento4 páginasMatematicas UniversitariasLuis Benjamin Mendoza BallinesAún no hay calificaciones
- Vectores en R3Documento19 páginasVectores en R3AMYNNXXXXAún no hay calificaciones
- Funciones básicas y transformaciones matemáticasDocumento12 páginasFunciones básicas y transformaciones matemáticasVickyAyusoAún no hay calificaciones
- Geometría descriptiva: Ejercicios de paralelismo y perpendicularidadDocumento14 páginasGeometría descriptiva: Ejercicios de paralelismo y perpendicularidadVania Malca NeyraAún no hay calificaciones
- Sem 11 - Integración NuméricaDocumento14 páginasSem 11 - Integración Numéricajair cantaro pabloAún no hay calificaciones
- Operaciones Con DecimalesDocumento16 páginasOperaciones Con DecimalesWilliam Jose Zapana ArapaAún no hay calificaciones
- Matematica Guia #3 Grado 5°Documento7 páginasMatematica Guia #3 Grado 5°Jorge Ivan DiazAún no hay calificaciones
- A) Determine La Segunda Derivada de Manera Exacta: FX X eDocumento7 páginasA) Determine La Segunda Derivada de Manera Exacta: FX X ebetzabe reyesAún no hay calificaciones
- Metodo de Runge KuttaDocumento39 páginasMetodo de Runge KuttakiosapienAún no hay calificaciones
- Ver14 Pre AritMod2Documento12 páginasVer14 Pre AritMod2Miguel Guevara ColloriAún no hay calificaciones
- S06 - La Derivada de Una Funcion RealDocumento18 páginasS06 - La Derivada de Una Funcion RealAnderson quezada medinaAún no hay calificaciones
- Funciones polinómicas: tipos, elementos e importancia (menos deDocumento28 páginasFunciones polinómicas: tipos, elementos e importancia (menos deMARIAAún no hay calificaciones
- Examen de Matematicas Sistemas de Ecuaciones 2x2Documento1 páginaExamen de Matematicas Sistemas de Ecuaciones 2x2Margarita Cárdenas Ruiz100% (1)
- (Ejercicios) Series NuméricasDocumento5 páginas(Ejercicios) Series NuméricasCristian EspinalAún no hay calificaciones
- Utilizacion MatlabDocumento9 páginasUtilizacion MatlabMichel Medina100% (1)
- Funciones y SucesionesDocumento3 páginasFunciones y SucesionesCarlos CaceresAún no hay calificaciones
- Plan Nivelacion 10 4p MatDocumento16 páginasPlan Nivelacion 10 4p MatDOCENTE MATEMATICAS 2Aún no hay calificaciones
- Clase 11est IDocumento9 páginasClase 11est IAxel VOAún no hay calificaciones
- UNPRG Límites y Continuidad 2Documento15 páginasUNPRG Límites y Continuidad 2Ivan Chapoñan CarranzaAún no hay calificaciones
- Kimberly - Funciones VectorialesDocumento4 páginasKimberly - Funciones VectorialesHerrera Franco K. NicoldAún no hay calificaciones
- Sintesis Cap.8Documento12 páginasSintesis Cap.8Jossele SolisAún no hay calificaciones
- Folleto Difusion Ordinaria de Un Sistema de 3 Componenetes Con RXN Química HeterogéneaDocumento6 páginasFolleto Difusion Ordinaria de Un Sistema de 3 Componenetes Con RXN Química HeterogéneaDiana Castillo SuarezAún no hay calificaciones
- MAT-119-T Clase 04 2.50 Transformación de Funciones - ASIGNACIONDocumento4 páginasMAT-119-T Clase 04 2.50 Transformación de Funciones - ASIGNACIONFélix Manuel Cruz FélixAún no hay calificaciones
- 20 - RadicalesDocumento4 páginas20 - RadicalesQuimica TecnologiaAún no hay calificaciones
- Introduccionala Geometria DescriptivaDocumento26 páginasIntroduccionala Geometria DescriptivaFlores HsaAún no hay calificaciones
- Tabla de Inercia PDFDocumento1 páginaTabla de Inercia PDFSantiago RodaAún no hay calificaciones