También podría gustarte
- Practica Curso Python-CgfDocumento3 páginasPractica Curso Python-CgfEsteban Quito100% (1)
- Guia Uso Medico OzonoDocumento338 páginasGuia Uso Medico OzonoJesus Rodriguez100% (2)
- Lab7 ElectronicadepotenciaDocumento5 páginasLab7 ElectronicadepotenciaJesús ZuñigaAún no hay calificaciones
- 223650ES IFU Oticon More miniRITE RDocumento42 páginas223650ES IFU Oticon More miniRITE RFerdinand FernandezAún no hay calificaciones
- Bull 10 CorredizoDocumento56 páginasBull 10 CorredizoGerardo Ramirez100% (1)
- Análisis de La Operación de Un Motor AsíncronoDocumento2 páginasAnálisis de La Operación de Un Motor AsíncronoRodrigo Rojas SoberAún no hay calificaciones
- Laboratorio 02 - Sistemas de Control Digital 2022BDocumento4 páginasLaboratorio 02 - Sistemas de Control Digital 2022BVASQUEZ CORNEJO FERNANDO ALEXANDERAún no hay calificaciones
- Practica1. Electrónica IndustrialDocumento7 páginasPractica1. Electrónica IndustrialwillianAún no hay calificaciones
- SC-AT5-Controladores Logicos ProgramablesDocumento27 páginasSC-AT5-Controladores Logicos ProgramablesmarianaAún no hay calificaciones
- Practica 3Documento5 páginasPractica 3Ricardo TorresAún no hay calificaciones
- Lab No 3 Electrónica Aplicada 2013 3N1-EoDocumento2 páginasLab No 3 Electrónica Aplicada 2013 3N1-EosaulAún no hay calificaciones
- Guia - Lab16 - SCR - TRIACDocumento10 páginasGuia - Lab16 - SCR - TRIACRonaldoAún no hay calificaciones
- Principios Conduccion PanelsDocumento32 páginasPrincipios Conduccion Panelsleonardo_arriagaAún no hay calificaciones
- Lab #2 Electrónica Analógica II 2018Documento2 páginasLab #2 Electrónica Analógica II 2018Miguel EstradaAún no hay calificaciones
- Electronica en AA Unidades Interiores on-OfFDocumento18 páginasElectronica en AA Unidades Interiores on-OfFJohan MateranAún no hay calificaciones
- Análisis de La Operación de Un Motor AsíncronoDocumento4 páginasAnálisis de La Operación de Un Motor AsíncronoRodrigo Rojas SoberAún no hay calificaciones
- Clase TiristoresDocumento37 páginasClase TiristoresHugo Fagua0% (1)
- Tablero de Transferencia y control-TCT-4520-1CDocumento4 páginasTablero de Transferencia y control-TCT-4520-1CRODOLFO MARTINEZAún no hay calificaciones
- 13 PDFDocumento9 páginas13 PDFLuisEduardoTkfAún no hay calificaciones
- Tarea 2Documento13 páginasTarea 2Gabriel ManriqueAún no hay calificaciones
- Clase 2 S2 Tiristores1Documento37 páginasClase 2 S2 Tiristores1MafeSiita LaGunaAún no hay calificaciones
- Explicacion TP N 3 Motor Asincronico TrifasicoDocumento12 páginasExplicacion TP N 3 Motor Asincronico TrifasicogracielaAún no hay calificaciones
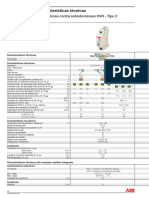
- ABB - Catalogo Descargadores Sobretensión - Es - 16Documento1 páginaABB - Catalogo Descargadores Sobretensión - Es - 16FedericoAún no hay calificaciones
- Proyecto PDFDocumento4 páginasProyecto PDFMattyAlejandroOAún no hay calificaciones
- 1 Tiristores SCR TRIACDocumento23 páginas1 Tiristores SCR TRIACalejandro cardenasAún no hay calificaciones
- Prelaboratorio 1Documento4 páginasPrelaboratorio 1Ricardo TorresAún no hay calificaciones
- Practiva de Mando 2020Documento38 páginasPractiva de Mando 2020Jhoel MedranoAún no hay calificaciones
- Ejercicios de Mado 1-2020Documento38 páginasEjercicios de Mado 1-2020Jhoel MedranoAún no hay calificaciones
- Prelaboratorio 4Documento3 páginasPrelaboratorio 4Ricardo TorresAún no hay calificaciones
- Practica 3 - Técnicas DigitalesDocumento3 páginasPractica 3 - Técnicas DigitalesisaelAún no hay calificaciones
- Maq Leccion 3-METODOS DE ARRANQUEDocumento46 páginasMaq Leccion 3-METODOS DE ARRANQUEJeroen van HoofAún no hay calificaciones
- Trabajo Tiristores y Triacs 4XDocumento7 páginasTrabajo Tiristores y Triacs 4XJavier Santiago BorghiAún no hay calificaciones
- Control DigitalDocumento17 páginasControl DigitalAlejandro A MejiasAún no hay calificaciones
- Sesion 08 - Funciones en Controladores DigitalesDocumento48 páginasSesion 08 - Funciones en Controladores DigitalesAndre JacintoAún no hay calificaciones
- PROYECTOfinales Control-Analogico-I 2014 2015Documento11 páginasPROYECTOfinales Control-Analogico-I 2014 2015lennig2000Aún no hay calificaciones
- PRBTDocumento5 páginasPRBTMarcelo VillarAún no hay calificaciones
- Lab 3 Elec IndDocumento4 páginasLab 3 Elec IndJeam Lui MamnyAún no hay calificaciones
- Leccion 3Documento5 páginasLeccion 3Julián AraqueAún no hay calificaciones
- Demodulador PDC FSKDocumento12 páginasDemodulador PDC FSKLuis NuñezAún no hay calificaciones
- Informe 1 ControlDocumento9 páginasInforme 1 ControlAlejandro Osorio GallgoAún no hay calificaciones
- Secadora Electrolux T5290Documento8 páginasSecadora Electrolux T5290Arin MoranAún no hay calificaciones
- Práctica 4 Parámetros de La Máquina de InducciónDocumento3 páginasPráctica 4 Parámetros de La Máquina de Induccióneduardo tumbacoAún no hay calificaciones
- Laboratorio 3Documento9 páginasLaboratorio 3Louie Derek OrtizAún no hay calificaciones
- Práctica 4 - 2017Documento5 páginasPráctica 4 - 2017Doni Fierro ÁlvarezAún no hay calificaciones
- Practicas de Electronica (Equipo 4)Documento10 páginasPracticas de Electronica (Equipo 4)Diego MendozaAún no hay calificaciones
- 9 - Labep2018 Ii 2 1Documento9 páginas9 - Labep2018 Ii 2 1Jhonatan BautistaAún no hay calificaciones
- Sesion 08 - Funciones en Controladores DigitalesDocumento49 páginasSesion 08 - Funciones en Controladores Digitalesjuver elio cosi condoriAún no hay calificaciones
- Práctica 8 OptoacopladoresDocumento5 páginasPráctica 8 OptoacopladoresAdrian AzasAún no hay calificaciones
- Lab02 EDP 2019 Rectificador No Controlado Trifásico. 1Documento10 páginasLab02 EDP 2019 Rectificador No Controlado Trifásico. 1Herssy Quispe0% (1)
- Codigo Error PF525Documento2 páginasCodigo Error PF525Paul Ramos CarcaustoAún no hay calificaciones
- Practica3 - Bandeja TransportadoraDocumento5 páginasPractica3 - Bandeja TransportadoraesruizAún no hay calificaciones
- PPM PWM PamDocumento5 páginasPPM PWM Pamroger macias marcaAún no hay calificaciones
- Introducción A La SimulaciónDocumento23 páginasIntroducción A La SimulaciónJeans GonzalezAún no hay calificaciones
- Modelado Convertidores CCDocumento56 páginasModelado Convertidores CCPablo García SuárezAún no hay calificaciones
- TP823423Documento3 páginasTP823423leonAún no hay calificaciones
- Informe Oscilador 555 Disparo OctotriacDocumento11 páginasInforme Oscilador 555 Disparo OctotriacFer RecaldeAún no hay calificaciones
- Lab 2-Eelectronica-De-Potencia Percy Riva, Urbina ArecheDocumento17 páginasLab 2-Eelectronica-De-Potencia Percy Riva, Urbina Arechehercye100% (1)
- Manual Lcac Inv Vf1 Espanol Mti 36hwdn1 N Co y Mti 55hwdn1 N CoDocumento146 páginasManual Lcac Inv Vf1 Espanol Mti 36hwdn1 N Co y Mti 55hwdn1 N CoAlberto CruzAún no hay calificaciones
- Triac PracticaDocumento13 páginasTriac PracticaEloradana Ochoa CoronaAún no hay calificaciones
- Laboratorio 6 Elt3752!1!2019xDocumento7 páginasLaboratorio 6 Elt3752!1!2019xAntonio MoyaAún no hay calificaciones
- 1-Presentación IntroducciónDocumento47 páginas1-Presentación IntroducciónMARIANOAún no hay calificaciones
- Practica TriacDocumento6 páginasPractica TriacirigoyeAún no hay calificaciones
- Eliminación de líneas ocultas: Revelando lo invisible: secretos de la visión por computadoraDe EverandEliminación de líneas ocultas: Revelando lo invisible: secretos de la visión por computadoraAún no hay calificaciones
- Tesis Sistema de ElectroacupunturaDocumento167 páginasTesis Sistema de ElectroacupunturaJesus Rodriguez100% (1)
- Seco Students Queue App ManualDocumento13 páginasSeco Students Queue App ManualJesus RodriguezAún no hay calificaciones
- DesignDocumento59 páginasDesignJesus RodriguezAún no hay calificaciones
- TFG DeliaSepulvedaMunnozDocumento54 páginasTFG DeliaSepulvedaMunnozJesus RodriguezAún no hay calificaciones
- Análisis de Potencia en AcDocumento19 páginasAnálisis de Potencia en AcJesus RodriguezAún no hay calificaciones
- Evaluacion Tutor Industrial (ELECTRICA)Documento3 páginasEvaluacion Tutor Industrial (ELECTRICA)Jesus RodriguezAún no hay calificaciones
- El Ozono Médico - AEPROMODocumento8 páginasEl Ozono Médico - AEPROMOJesus RodriguezAún no hay calificaciones
- Preguntero PAV2Documento344 páginasPreguntero PAV2Gabriel Emiliano EndrekAún no hay calificaciones
- Presentación de La Plataforma SofiaXT (1) (2579)Documento23 páginasPresentación de La Plataforma SofiaXT (1) (2579)MARÍA DE LA LUZ CAMACHO VAZQUEZAún no hay calificaciones
- 1 2 3 GUION Pruebas Funcionales EN DISEnODocumento2 páginas1 2 3 GUION Pruebas Funcionales EN DISEnORichard R. MooreAún no hay calificaciones
- Capitulo 3-Configuración Del Sistema Foxboro A2Documento68 páginasCapitulo 3-Configuración Del Sistema Foxboro A2ReneMartinezGutierrezAún no hay calificaciones
- Smart HopperDocumento2 páginasSmart HopperWilson Javier Serrano MariñoAún no hay calificaciones
- Guía de Aprendizaje. DomoticaDocumento4 páginasGuía de Aprendizaje. Domotica†Camilo Flórez†Aún no hay calificaciones
- Trabajo Colaborativo - Redes #5Documento23 páginasTrabajo Colaborativo - Redes #5Bio InstrumentalAún no hay calificaciones
- Módulo 4. Novedades HTML 5 y MultimediaDocumento3 páginasMódulo 4. Novedades HTML 5 y MultimediaKatty CalderonAún no hay calificaciones
- Componentes de Un Sistema Operativo Por Cristina ZelayaDocumento6 páginasComponentes de Un Sistema Operativo Por Cristina ZelayaCristina ZelayaAún no hay calificaciones
- Tutorial Blinklearning 2Documento5 páginasTutorial Blinklearning 2Ginés Martínez López0% (1)
- PF Practica 03Documento3 páginasPF Practica 03Juan Cruz ReboredoAún no hay calificaciones
- Analisis de Sistemas Mineros-UnpDocumento69 páginasAnalisis de Sistemas Mineros-UnpDsam IIAún no hay calificaciones
- Manual de Instrucciones de Instalacin y Configuracin de Cmara Panormica Multisensor de 32MP V1.0 ESDocumento19 páginasManual de Instrucciones de Instalacin y Configuracin de Cmara Panormica Multisensor de 32MP V1.0 ESmartinAún no hay calificaciones
- Cómo Instalar Ubuntu Server 18.04 LTS y Configurarlo CorrectamenteDocumento11 páginasCómo Instalar Ubuntu Server 18.04 LTS y Configurarlo CorrectamenteAline Peña ColungaAún no hay calificaciones
- Top 10 de Riesgos en Aplicaciones Web y MóvilesDocumento6 páginasTop 10 de Riesgos en Aplicaciones Web y MóvilesKelvin Josue Delgado CedenoAún no hay calificaciones
- Tarea 1 - 102016 - 233 Deisy AcevedoDocumento10 páginasTarea 1 - 102016 - 233 Deisy AcevedoDey AcevedoAún no hay calificaciones
- Tarea 6 LengynfierroDocumento14 páginasTarea 6 LengynfierroLenin CabañasAún no hay calificaciones
- Exposicion Foro Patrones de Diseño Grupo 3Documento23 páginasExposicion Foro Patrones de Diseño Grupo 3francisco sotalinAún no hay calificaciones
- Isof1302a - 2020 - 2 Taller BDDocumento2 páginasIsof1302a - 2020 - 2 Taller BDJenifer BustamanteAún no hay calificaciones
- Hotel Nikkei Kyodai S.A.C.: Lunes, 15 Agosto, 2022 Lunes, 15 Agosto, 2022Documento1 páginaHotel Nikkei Kyodai S.A.C.: Lunes, 15 Agosto, 2022 Lunes, 15 Agosto, 2022Dennis Culqui EteneAún no hay calificaciones
- Como Congelar Una Computadora Usando El Programa Deep Freeze Versión 7Documento6 páginasComo Congelar Una Computadora Usando El Programa Deep Freeze Versión 7marcosAún no hay calificaciones
- ContraprestacionDocumento6 páginasContraprestacionArturo Puma GenovezAún no hay calificaciones
- Anexo 2 - Diagrama de FlujoDocumento4 páginasAnexo 2 - Diagrama de FlujoBrayan Alexis Vélez MejíaAún no hay calificaciones
- Sistema Picaxe 25-02-23Documento62 páginasSistema Picaxe 25-02-23Bhen TecuAún no hay calificaciones
- Guia de Estudios 4Documento6 páginasGuia de Estudios 4Noam KeingeskiAún no hay calificaciones
- Actividad 3-VirusDocumento2 páginasActividad 3-Viruseliana cortesAún no hay calificaciones
- La Empresa Game CenterDocumento2 páginasLa Empresa Game CenterHenry Jose Izquierdo VillegasAún no hay calificaciones
- Ejercicios de Writer 02 (3) .OdtDocumento4 páginasEjercicios de Writer 02 (3) .OdtBlanca Bautista PérezAún no hay calificaciones