También podría gustarte
- Demanda de Rebaja de Alimentos MenoresDocumento6 páginasDemanda de Rebaja de Alimentos MenoresVictor FuentesAún no hay calificaciones
- Semana 5 - Mecanismo Diferencial - AlumnosDocumento44 páginasSemana 5 - Mecanismo Diferencial - AlumnosAirón CrispinAún no hay calificaciones
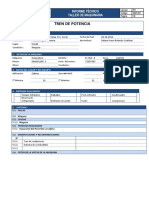
- Tren de FuerzaDocumento5 páginasTren de FuerzaYanin ScherbatskyAún no hay calificaciones
- Componentes de Cadena y ZapataDocumento6 páginasComponentes de Cadena y ZapataSeñor Falso NombreAún no hay calificaciones
- Maquinaria Pesada Diferenciales de TrabaDocumento2 páginasMaquinaria Pesada Diferenciales de TrabaEvelyn HerreraAún no hay calificaciones
- Diferencial Lab2 Tren de FuerzaDocumento16 páginasDiferencial Lab2 Tren de FuerzaSmithRamsteinLocoAún no hay calificaciones
- Transmision de Contra EjeDocumento39 páginasTransmision de Contra Ejemiguel angel tecse cariAún no hay calificaciones
- Control Hidráulico de ServotransmisiónDocumento5 páginasControl Hidráulico de ServotransmisiónJose Julian Ortiz OreAún no hay calificaciones
- Tren de FuerzaDocumento26 páginasTren de FuerzaklamillavAún no hay calificaciones
- Divisor de ParDocumento6 páginasDivisor de PardarioAún no hay calificaciones
- ServotransmisionesDocumento4 páginasServotransmisionesvalentina de jesus zuniga barros100% (1)
- Informe Tren de Fuerza MotrizDocumento5 páginasInforme Tren de Fuerza MotrizDiego Leonardo GonzálezAún no hay calificaciones
- Servo Trans MisionesDocumento17 páginasServo Trans MisionesDiego OrdoñezAún no hay calificaciones
- Resumen Tren Fuerza 1Documento15 páginasResumen Tren Fuerza 1Galo OrralaAún no hay calificaciones
- Cambiar Una Cruceta de TransmisiónDocumento8 páginasCambiar Una Cruceta de TransmisiónDeverol SamyAún no hay calificaciones
- Convertidor Par Rev1Documento51 páginasConvertidor Par Rev1Frang Moscoso100% (1)
- Servo TransmisionDocumento25 páginasServo TransmisionClaudia Maldonado100% (1)
- Reconocimiento de La SuspensionDocumento6 páginasReconocimiento de La SuspensionSteven RonquilloAún no hay calificaciones
- Suspensión Neumática PilotadaDocumento3 páginasSuspensión Neumática PilotadaYeeferrsann HernandezAún no hay calificaciones
- Tren de Rodaje PDFDocumento24 páginasTren de Rodaje PDFJorge Guzmán SánchezAún no hay calificaciones
- Informe Técnico Transmisión PlanetariaDocumento10 páginasInforme Técnico Transmisión PlanetariaKelvin FaneyteAún no hay calificaciones
- Hoja de Taller - Convertidor de Par GRUPODocumento7 páginasHoja de Taller - Convertidor de Par GRUPOJORGE QUIQUIJANAAún no hay calificaciones
- Diferencial MecanicaDocumento7 páginasDiferencial MecanicaJeneth RosadoAún no hay calificaciones
- EmbragueDocumento15 páginasEmbraguedaniel coelloAún no hay calificaciones
- 2 Caja de Cambios Mecánica 1Documento14 páginas2 Caja de Cambios Mecánica 1Jorge Steven Vasquez CorreaAún no hay calificaciones
- Precarga Del Piñón Del Diferencial - AjustarDocumento7 páginasPrecarga Del Piñón Del Diferencial - Ajustarmijael1393Aún no hay calificaciones
- Análisis de Engranajes Simples y PlanetariosDocumento14 páginasAnálisis de Engranajes Simples y PlanetariosTania Gonzalez100% (1)
- Informe N1 Tren de FuerzaDocumento15 páginasInforme N1 Tren de FuerzaRdg SànchezAún no hay calificaciones
- Curso Puente Propulsor Diferencial Funciones Tipos Partes FuncionamientoDocumento18 páginasCurso Puente Propulsor Diferencial Funciones Tipos Partes FuncionamientoYosira Luna MamaniAún no hay calificaciones
- Act. de Aprend. #4-0 Calculo de Tolerancias de AjusteDocumento8 páginasAct. de Aprend. #4-0 Calculo de Tolerancias de AjusteVini CtAún no hay calificaciones
- Motores de Maquinaria Pesada-Sesion 7Documento56 páginasMotores de Maquinaria Pesada-Sesion 7Diego Altamirano100% (1)
- Tren de Potencia de La Motoniveladora 16MDocumento1 páginaTren de Potencia de La Motoniveladora 16MYuber CcoaAún no hay calificaciones
- Diferenciales y TransmisionesDocumento8 páginasDiferenciales y TransmisionesGuillermo SánchezAún no hay calificaciones
- Mando Final Parte RULODocumento13 páginasMando Final Parte RULOEdison Maldonado EugenioAún no hay calificaciones
- Foro Temático Del Modulo de Reparacion de Motor DiéselDocumento2 páginasForo Temático Del Modulo de Reparacion de Motor DiéselYorvis De La O Tapia100% (1)
- Convertidor de ParDocumento4 páginasConvertidor de ParCarlos CamarenaAún no hay calificaciones
- ServotransmisiónDocumento2 páginasServotransmisiónMoisesALCordovaJustano100% (1)
- Mandos FinalesDocumento3 páginasMandos FinalesAnonymous qsTR4ZQUAún no hay calificaciones
- Informe 1 Embrague MonodiscoDocumento20 páginasInforme 1 Embrague MonodiscoStevin BonifazAún no hay calificaciones
- Laboratorio 5 - 5to Ciclo Grupo B - C13 PDFDocumento11 páginasLaboratorio 5 - 5to Ciclo Grupo B - C13 PDFCesar Moises Rudas LucanoAún no hay calificaciones
- Convertidor de ParrDocumento10 páginasConvertidor de ParrCristian Hernandez MorenoAún no hay calificaciones
- Manual Volvo Camion VM Direccion Suspension DelanteraDocumento19 páginasManual Volvo Camion VM Direccion Suspension DelanteraRoussel Florez ZuloagaAún no hay calificaciones
- ServotransmisiónesDocumento9 páginasServotransmisiónesChuy DelgadoAún no hay calificaciones
- 3a Presentacion Hidrostatica 2021Documento68 páginas3a Presentacion Hidrostatica 2021dj danielilloAún no hay calificaciones
- Procedimiento Desarme Armado de DiferencialDocumento41 páginasProcedimiento Desarme Armado de DiferencialEdwuard GutierrezAún no hay calificaciones
- Trabajo Final de Equipo de TraslacionDocumento16 páginasTrabajo Final de Equipo de TraslacionRobert AbantoAún no hay calificaciones
- 3 . - PPT Sesión 03 2020 Embrague Hidráulico y Convertidor de TorqueDocumento33 páginas3 . - PPT Sesión 03 2020 Embrague Hidráulico y Convertidor de TorqueAlonso Fernando Magallanes PalominoAún no hay calificaciones
- Modulo 1Documento22 páginasModulo 1SINCRO TECAún no hay calificaciones
- Curso Componentes Transmision Maquinaria Pesada PDFDocumento61 páginasCurso Componentes Transmision Maquinaria Pesada PDFValerio Arestegui HuaytaAún no hay calificaciones
- Tarea 1 - Caja de Transmision MecanicaDocumento6 páginasTarea 1 - Caja de Transmision MecanicaYhan Carlos Huamani Mendoza0% (1)
- Examen Final de Maq. PesadaDocumento18 páginasExamen Final de Maq. PesadadenisAún no hay calificaciones
- Contaminación en Los Sistemas de Fluidos de Su MáquinaDocumento21 páginasContaminación en Los Sistemas de Fluidos de Su MáquinaRonal Quispe HuamanAún no hay calificaciones
- Convertidor de Par CVDocumento9 páginasConvertidor de Par CVJaime AmésquitaAún no hay calificaciones
- Convertidor de ParDocumento11 páginasConvertidor de ParWagner Luis PONCE CASTILLOAún no hay calificaciones
- Guia de Laboratorio Tren de Potencia 950LDocumento23 páginasGuia de Laboratorio Tren de Potencia 950LMiguel DominguezAún no hay calificaciones
- Informe - Tren de PotenciaDocumento8 páginasInforme - Tren de PotenciaROLANDO CRISTHIAN SALAZAR YAURIAún no hay calificaciones
- Practica de ArrancadorDocumento3 páginasPractica de ArrancadorBENITES TICLLAS DAYVEAún no hay calificaciones
- Mando Final Planetario de Reduccion DobleDocumento11 páginasMando Final Planetario de Reduccion DobleWilvert Manuelo ArphiAún no hay calificaciones
- PDF Los Mandos Finales en La Maquinaria Pesada Principios Basicos DLDocumento3 páginasPDF Los Mandos Finales en La Maquinaria Pesada Principios Basicos DLAntonny DíazAún no hay calificaciones
- Texto7 Diferencial PDFDocumento24 páginasTexto7 Diferencial PDFdomingoojsrAún no hay calificaciones
- Informe de TuberíasDocumento16 páginasInforme de Tuberíasmola sacAún no hay calificaciones
- Especificaciones Tecnicas - Estaciones de BombeoDocumento58 páginasEspecificaciones Tecnicas - Estaciones de BombeoFrank Moreno EscuderoAún no hay calificaciones
- Los Agricultores de ChocontáDocumento3 páginasLos Agricultores de ChocontáCamilo Buitrago ParadaAún no hay calificaciones
- Unach Ipg Pymes 2015 Anx 0023.1Documento32 páginasUnach Ipg Pymes 2015 Anx 0023.176182527Aún no hay calificaciones
- Nia 610Documento8 páginasNia 610LuisMarquezCornejoAún no hay calificaciones
- Denia CriteriosDocumento6 páginasDenia CriteriosarqvseguraAún no hay calificaciones
- 00100013862Documento2 páginas00100013862EduardoAún no hay calificaciones
- Corrientes de FallaDocumento5 páginasCorrientes de FallaGonzalo50% (2)
- Infografìa PlasticosDocumento10 páginasInfografìa PlasticosAntonio HernandezAún no hay calificaciones
- Pospr-i-001-Diligenciamiento Del Formulario de Inscripcion de Sujetos de Ordenamiento Fiso Persona NaturalDocumento50 páginasPospr-i-001-Diligenciamiento Del Formulario de Inscripcion de Sujetos de Ordenamiento Fiso Persona Naturalcristopher echagarreta krauseAún no hay calificaciones
- Gestion Tecnologica Tarea 1Documento10 páginasGestion Tecnologica Tarea 1JULIETHAún no hay calificaciones
- Canales, Puertos y Emprendimiento en El Chocó TrabajoDocumento17 páginasCanales, Puertos y Emprendimiento en El Chocó TrabajonelcyAún no hay calificaciones
- Rubrica 1 - Organizador GráficoDocumento2 páginasRubrica 1 - Organizador GráficowillyjulcaAún no hay calificaciones
- Practica 1Documento7 páginasPractica 1Adrián MuñozAún no hay calificaciones
- Ejercicios de Flujo MasicoDocumento4 páginasEjercicios de Flujo MasicoJhaner Luis Carrera TerronesAún no hay calificaciones
- (TP1) Certif DigDocumento10 páginas(TP1) Certif Digsalud laboralAún no hay calificaciones
- Clase Tableros de MedicionDocumento44 páginasClase Tableros de MedicionJessica ChapinAún no hay calificaciones
- Tesis Briones UnmsmDocumento157 páginasTesis Briones UnmsmJuan Pablo PerezAún no hay calificaciones
- Licey Al Medio 2020Documento4 páginasLicey Al Medio 2020Felix PachecoAún no hay calificaciones
- NIA 230 Documentación de AuditoríaDocumento4 páginasNIA 230 Documentación de AuditoríaKatherine AlmeidaAún no hay calificaciones
- Apunte Diagrama de Flujo y PseudocodigoDocumento21 páginasApunte Diagrama de Flujo y PseudocodigoPatricio Villagra AguayoAún no hay calificaciones
- Como Estabilizar Un Suelo Arcilloso A La Hora de ConstruirDocumento11 páginasComo Estabilizar Un Suelo Arcilloso A La Hora de ConstruirFREDDYS197Aún no hay calificaciones
- Instalacion Fotovoltaica ...............Documento16 páginasInstalacion Fotovoltaica ...............Hugo Pérez MorenoAún no hay calificaciones
- Control de Calidad en PaltaDocumento24 páginasControl de Calidad en PaltaLucia SosaAún no hay calificaciones
- Acv 4Documento4 páginasAcv 4Eddy SullonAún no hay calificaciones
- Quiz 2 - Semana 7 - Ra - Primer Bloque-Liderazgo y Pensamiento Estrategico - (Grupo6)Documento8 páginasQuiz 2 - Semana 7 - Ra - Primer Bloque-Liderazgo y Pensamiento Estrategico - (Grupo6)Pia ArangoAún no hay calificaciones
- Suyo NTP 400.010 AgregadosDocumento3 páginasSuyo NTP 400.010 AgregadosNavido SuyoAún no hay calificaciones
- Normas de Calidad Iso 14001 2015Documento9 páginasNormas de Calidad Iso 14001 2015Hernan Rodrigo Valencia VillacisAún no hay calificaciones
- ININ 4015-Asignación 2Documento4 páginasININ 4015-Asignación 2Christian MalaveAún no hay calificaciones