También podría gustarte
- Semana 7 Integrales Triples Coordenadas Cilindricas y EsfericasDocumento14 páginasSemana 7 Integrales Triples Coordenadas Cilindricas y EsfericasJ ZEGARRAAún no hay calificaciones
- Ronald Mate Aplicada TrabajoDocumento9 páginasRonald Mate Aplicada TrabajoJhon Cordova AlvaradoAún no hay calificaciones
- Derivadas Parciales Moodle1Documento10 páginasDerivadas Parciales Moodle1Soliz Espada Juan JoséAún no hay calificaciones
- Parcial - Resumen Matemático CGV PDFDocumento4 páginasParcial - Resumen Matemático CGV PDFStephanie AzorsaAún no hay calificaciones
- Planos en El Espacio - (I) - 21-BDocumento6 páginasPlanos en El Espacio - (I) - 21-BSonja HarrisonAún no hay calificaciones
- S13.s1 - MaterialDocumento17 páginasS13.s1 - MaterialJosé ParéAún no hay calificaciones
- Teorema de La StokesDocumento4 páginasTeorema de La StokesKathy ZottaAún no hay calificaciones
- TP5 PlanoYRectaEnElEspacioDocumento8 páginasTP5 PlanoYRectaEnElEspacioAbril Pereira MaldonadoAún no hay calificaciones
- Teórico Unidad VIDocumento12 páginasTeórico Unidad VIIara HansenAún no hay calificaciones
- Solucion ExamenDocumento9 páginasSolucion ExamenCristopher Jaramillo100% (1)
- Hoja de Taller 3Documento12 páginasHoja de Taller 3Sheila Maribel Blas López100% (1)
- P-14, Grupo N°03Documento7 páginasP-14, Grupo N°03Alexander RosalesAún no hay calificaciones
- Superficies ParametrizadasDocumento16 páginasSuperficies ParametrizadasReben PerezAún no hay calificaciones
- Superficies IDocumento11 páginasSuperficies IMercedes GutierrezAún no hay calificaciones
- Tema 4Documento3 páginasTema 4jesus ticonaAún no hay calificaciones
- Formula de OstrogradskiDocumento3 páginasFormula de OstrogradskiMiguel TrujilloAún no hay calificaciones
- Coordenadas EsfericasDocumento23 páginasCoordenadas EsfericasAlonso AlmestarAún no hay calificaciones
- El Plano EuclidianoDocumento27 páginasEl Plano EuclidianoChristopper Vasquez CrispinAún no hay calificaciones
- Calculo Vectorial - Derivadas Parciales y Plano TangenteDocumento36 páginasCalculo Vectorial - Derivadas Parciales y Plano Tangenteandersonmelgar2021Aún no hay calificaciones
- Taller Semana 03Documento12 páginasTaller Semana 03Nirvana HornaAún no hay calificaciones
- Sistema de Coordenada Rectangular en El EspacioDocumento26 páginasSistema de Coordenada Rectangular en El EspacioValentin ValeraAún no hay calificaciones
- Parte II. Coordenadas Curvilineas Ortogonales. PDFDocumento17 páginasParte II. Coordenadas Curvilineas Ortogonales. PDFJhanet AHAún no hay calificaciones
- IAM SESION 03-04 1era EdiciónDocumento19 páginasIAM SESION 03-04 1era EdiciónDavid Plasencia CanoAún no hay calificaciones
- Integrales TriplesDocumento8 páginasIntegrales TriplesArtemio Chavez ToledoAún no hay calificaciones
- Planos 2023-1Documento26 páginasPlanos 2023-1Santillan Crisante Diogo GabrielAún no hay calificaciones
- Integracion ComplejaDocumento4 páginasIntegracion ComplejaGersonG.SerranoFloresAún no hay calificaciones
- Clase 3 de Cálculo III PDFDocumento51 páginasClase 3 de Cálculo III PDFANGELA MARIA ORTEGA VALERAAún no hay calificaciones
- 176 Seccion ConicaDocumento23 páginas176 Seccion ConicaHUARIPATA ASCATE JORGE ENRIQUEAún no hay calificaciones
- Integrales de Superficie de Campos EscalaresDocumento46 páginasIntegrales de Superficie de Campos EscalaresLUIS ISIDRO HUARCAYA TORRESAún no hay calificaciones
- Matematicas-Decimo-Guia 2. Geometria Analítica. Iv PeriodoDocumento8 páginasMatematicas-Decimo-Guia 2. Geometria Analítica. Iv PeriodoCamilo MirandaAún no hay calificaciones
- 02 - VectoresDocumento40 páginas02 - VectoresSaúl OrtizAún no hay calificaciones
- Ejemplos Biot-SavartDocumento4 páginasEjemplos Biot-SavartGio ASAún no hay calificaciones
- Plano y Recta en 3 Dimensiones PDFDocumento48 páginasPlano y Recta en 3 Dimensiones PDFAriana ColqueAún no hay calificaciones
- El Plano EuclideanoDocumento45 páginasEl Plano EuclideanoDeyvi La Rosa OrtegaAún no hay calificaciones
- Aplicacion de Integrales Triples 3.1Documento25 páginasAplicacion de Integrales Triples 3.1Eduardo UrbinaAún no hay calificaciones
- 4 Razon de Un SegmentoDocumento7 páginas4 Razon de Un SegmentoCelis Yoshikawa Horacio ShougoAún no hay calificaciones
- UNIDAD 3. Integrales Dobles y Triples - Integrales Dobles en Coordenadas PolaresDocumento26 páginasUNIDAD 3. Integrales Dobles y Triples - Integrales Dobles en Coordenadas PolaresPiero MazuelosAún no hay calificaciones
- Integral de Superficie de Campos Escalares y Vectoriales: AplicacionesDocumento53 páginasIntegral de Superficie de Campos Escalares y Vectoriales: AplicacionesLUIS ISIDRO HUARCAYA TORRESAún no hay calificaciones
- Clase Sobre PlanosDocumento8 páginasClase Sobre PlanosCristhian GomezAún no hay calificaciones
- Campos Armonicos en El TiempoDocumento19 páginasCampos Armonicos en El TiempoRea Avila ManuelAún no hay calificaciones
- Integrales de FlujoDocumento11 páginasIntegrales de FlujodiegoAún no hay calificaciones
- Guia Rectas Tangentes Horizontales y VerticalesDocumento5 páginasGuia Rectas Tangentes Horizontales y VerticalesAlexander Ardila MoraAún no hay calificaciones
- Clase 33 - Indicaciones PDFDocumento15 páginasClase 33 - Indicaciones PDFOneal RosalesAún no hay calificaciones
- Centroides e Inercias de Una Figura PlanaDocumento12 páginasCentroides e Inercias de Una Figura PlanaPablo Fernández GonzálezAún no hay calificaciones
- CircunferenciaDocumento54 páginasCircunferenciasotosbs22Aún no hay calificaciones
- Capitulo 4 La Recta-2022Documento28 páginasCapitulo 4 La Recta-2022Liliana SamaniegoAún no hay calificaciones
- Sesion 06 - Ecuacion - de - La - RectaDocumento17 páginasSesion 06 - Ecuacion - de - La - RectaGeison AlexanderAún no hay calificaciones
- 11.2 Cálculo Vectorial - Integral de Linea de Campo VectorialDocumento11 páginas11.2 Cálculo Vectorial - Integral de Linea de Campo VectorialDārlēnē MüllerAún no hay calificaciones
- Cordenadas Esfericas y CilindricasDocumento23 páginasCordenadas Esfericas y CilindricasErik victor Anchivilca ZavaletaAún no hay calificaciones
- Preliminares Mate IIDocumento8 páginasPreliminares Mate IINico ZapataAún no hay calificaciones
- Sem 02 PPT Rectas y Planos en r3Documento32 páginasSem 02 PPT Rectas y Planos en r3malcommm100% (2)
- Tarea 2Documento13 páginasTarea 2Niyireth PerezAún no hay calificaciones
- Gaitán Giancarlo 1178620 Proyecto3 C2Documento12 páginasGaitán Giancarlo 1178620 Proyecto3 C2Giancarlo GaitánAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- GraficaDocumento1 páginaGraficaRaquel TorrezAún no hay calificaciones
- INSTALACION DE SISTEMA DE EXPERIMENTACION n9Documento3 páginasINSTALACION DE SISTEMA DE EXPERIMENTACION n9Raquel TorrezAún no hay calificaciones
- Civ3397 Ex Plano 0Documento1 páginaCiv3397 Ex Plano 0Raquel TorrezAún no hay calificaciones
- FUNDAMENTO TEORICO n9Documento1 páginaFUNDAMENTO TEORICO n9Raquel TorrezAún no hay calificaciones
- Formulación Del Modelo MatemáticoDocumento1 páginaFormulación Del Modelo MatemáticoRaquel TorrezAún no hay calificaciones
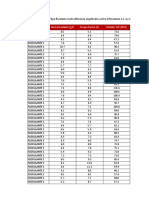
- REGISTRO DE DATOS EXPERIMENTALES n9Documento2 páginasREGISTRO DE DATOS EXPERIMENTALES n9Raquel TorrezAún no hay calificaciones
- Formulación Del Modelo MatemáticoDocumento1 páginaFormulación Del Modelo MatemáticoRaquel TorrezAún no hay calificaciones
- Dibujo Arquitectonico Civ 1102 F 1 2021Documento26 páginasDibujo Arquitectonico Civ 1102 F 1 2021Raquel TorrezAún no hay calificaciones
- 01-Taller #01-Minitab BásicoDocumento3 páginas01-Taller #01-Minitab BásicoRaquel TorrezAún no hay calificaciones
- TRATAMIENTO DE DATOS EXPERIMENTALES EXPERIMENTO NoDocumento3 páginasTRATAMIENTO DE DATOS EXPERIMENTALES EXPERIMENTO NoRaquel TorrezAún no hay calificaciones
- Hoja Guia Teoria 216Documento2 páginasHoja Guia Teoria 216Raquel TorrezAún no hay calificaciones
- Prac 1 Mat 1207GDocumento2 páginasPrac 1 Mat 1207GRaquel TorrezAún no hay calificaciones
- Vectores en R3. Ejercicios ResueltosDocumento7 páginasVectores en R3. Ejercicios ResueltosRaquel Torrez50% (4)
- Abreviaturas de Comandos de Autocad en EspanolDocumento8 páginasAbreviaturas de Comandos de Autocad en EspanolBenjamin Collantes Tenorio88% (17)
- Primer Parcial Calculo 2 Sem 2 2020Documento1 páginaPrimer Parcial Calculo 2 Sem 2 2020Raquel TorrezAún no hay calificaciones
- APOYOMINITABDocumento2 páginasAPOYOMINITABRaquel TorrezAún no hay calificaciones
- Tema IDocumento20 páginasTema IRaquel TorrezAún no hay calificaciones
- IngenieriaSisInf2011mod Op RP PDFDocumento3 páginasIngenieriaSisInf2011mod Op RP PDFIng. Juan Pablo Yabeta MaldonadoAún no hay calificaciones
- Tema 1.4. Transformación Ortogonal de CoordenadasDocumento4 páginasTema 1.4. Transformación Ortogonal de CoordenadasJhanet AHAún no hay calificaciones
- Taller #03-BásicoDocumento10 páginasTaller #03-BásicoRaquel TorrezAún no hay calificaciones
- Ejercicios de Metodos Numericos - OcrDocumento199 páginasEjercicios de Metodos Numericos - OcrVíctor Hugo Reséndiz Estrada100% (1)
- CIV 1102F DIBUJO TECNICO II Introduccion 1 2021Documento35 páginasCIV 1102F DIBUJO TECNICO II Introduccion 1 2021Raquel TorrezAún no hay calificaciones
- BECERRIL ESPINOSA JOSE VENTURA Ecuaciones Diferenciales Tecnicas de Solucion y AplicacionesDocumento252 páginasBECERRIL ESPINOSA JOSE VENTURA Ecuaciones Diferenciales Tecnicas de Solucion y AplicacionesMGDArmas33% (3)
- Tema 1.3. Trnasformación Ortogonal de CoordenadasDocumento8 páginasTema 1.3. Trnasformación Ortogonal de CoordenadasJhanet AHAún no hay calificaciones
- GEOMETRÍA DIFERENCIAL. Teoría1Documento7 páginasGEOMETRÍA DIFERENCIAL. Teoría1Raquel TorrezAún no hay calificaciones
- Tutorial para Instalar DeriveDocumento6 páginasTutorial para Instalar DeriveClaudia BarcoAún no hay calificaciones
- Areas, Perimetros, PitagorasDocumento3 páginasAreas, Perimetros, PitagorasLucía Acero SoriaAún no hay calificaciones
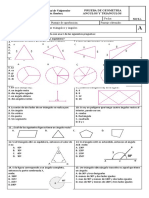
- 3 Evaluacion BimestralDocumento6 páginas3 Evaluacion BimestralJose Luis Soto SaldañaAún no hay calificaciones
- Geometria KimDocumento13 páginasGeometria Kimluz100% (1)
- Semejanza ImprimirDocumento3 páginasSemejanza ImprimirJorge JulonAún no hay calificaciones
- Geometria - TriangulosDocumento6 páginasGeometria - TriangulosEder Mendoza MendozaAún no hay calificaciones
- Prueba de Geometria 5ºDocumento6 páginasPrueba de Geometria 5ºMaria Ines TapiaAún no hay calificaciones
- SUPERFICIESDocumento13 páginasSUPERFICIESrafael rivasAún no hay calificaciones
- Hoja de Trabajo Mate IV Unidad 8Documento2 páginasHoja de Trabajo Mate IV Unidad 8octavio-1Aún no hay calificaciones
- Circunferencia PDFDocumento6 páginasCircunferencia PDFDiego7120Aún no hay calificaciones
- Triángulos-Propiedades Basicas Pag 173-174-175Documento2 páginasTriángulos-Propiedades Basicas Pag 173-174-175elmer roger larota espinozaAún no hay calificaciones
- Formulas Areas Volumenes PDFDocumento2 páginasFormulas Areas Volumenes PDFCarmenMartinAún no hay calificaciones
- Guia 3 - Razones Trigonométricas de Ángulos NotablesDocumento4 páginasGuia 3 - Razones Trigonométricas de Ángulos Notablesrcartolin824573% (22)
- Guia 2 CircunferenciaDocumento2 páginasGuia 2 CircunferenciaPablo Eduardo Rivera RojasAún no hay calificaciones
- 1º de Sec. Área de Figuras PlanasDocumento7 páginas1º de Sec. Área de Figuras PlanasArlethe CondeAún no hay calificaciones
- CUADRILATEROSDocumento26 páginasCUADRILATEROSFaku Tg Nico100% (1)
- La EsferaDocumento8 páginasLa EsferaRogger Exequiel Pairazaman RuizAún no hay calificaciones
- Solucionario Geometria Semana6Documento14 páginasSolucionario Geometria Semana6JIM DALMER RAMIREZ DOMINGUEZAún no hay calificaciones
- Figuras 3D Primero BásicoDocumento30 páginasFiguras 3D Primero BásicoMariana GuerreroAún no hay calificaciones
- T Sem 16 Resolución de Triángulos OblicuángulosDocumento3 páginasT Sem 16 Resolución de Triángulos OblicuángulosCarlos Alberto Colque GarciaAún no hay calificaciones
- Valores Razones TrigonometricasDocumento7 páginasValores Razones TrigonometricasDainer FriasAún no hay calificaciones
- 1 - Operatoria DirectaDocumento8 páginas1 - Operatoria DirectaMauricio Ramirez Herrera50% (2)
- VectoresDocumento11 páginasVectoresbrianAún no hay calificaciones
- 2 ESO 11 Semejanza Profe PDFDocumento25 páginas2 ESO 11 Semejanza Profe PDFtomasAún no hay calificaciones
- Examen Bimestral 3º Bimestre - BartonDocumento16 páginasExamen Bimestral 3º Bimestre - BartonTony StartAún no hay calificaciones
- Apuntes Dibujo Técnico 3º EsoDocumento21 páginasApuntes Dibujo Técnico 3º EsoepvnarceaAún no hay calificaciones
- Ejemplos de La ElipseDocumento4 páginasEjemplos de La ElipseFray Pozo67% (6)
- Examen - Matematica - Completo Uni 2014 II PamerDocumento24 páginasExamen - Matematica - Completo Uni 2014 II PamerJoaquin PrietoAún no hay calificaciones
- Guia 26. Area y Perimetro IIDocumento3 páginasGuia 26. Area y Perimetro IISeeler Bailon GAún no hay calificaciones
- MAT 10 - IT Guía Ejercicios, Perímetros y Áreas PDFDocumento7 páginasMAT 10 - IT Guía Ejercicios, Perímetros y Áreas PDFB6D4N0Aún no hay calificaciones
- Semana 3 - Triangulos IiDocumento4 páginasSemana 3 - Triangulos IiJimmy Alexander Ochoa RuizAún no hay calificaciones