También podría gustarte
- Manual Calculadora Casio FinancieraDocumento16 páginasManual Calculadora Casio FinancieratopmnvAún no hay calificaciones
- Ejercicios ResueltosDocumento14 páginasEjercicios ResueltosAbelord TaVoAún no hay calificaciones
- Series de Tiempo 1Documento53 páginasSeries de Tiempo 1Grecia Shina Lovón ChisllaAún no hay calificaciones
- Resumen Financiera Primeras 3 UnidadesDocumento22 páginasResumen Financiera Primeras 3 UnidadesGabriel De AbreuAún no hay calificaciones
- MacroUdeSA EjPracticar 1 SolDocumento5 páginasMacroUdeSA EjPracticar 1 Solnorres ponde100% (1)
- Introducción A Los Modelo de RegresiónDocumento19 páginasIntroducción A Los Modelo de RegresiónrogerfernandezhidalgAún no hay calificaciones
- Programa OficialDocumento8 páginasPrograma OficialMariano PabloAún no hay calificaciones
- Teoría del capital y la distribución: Análisis de la validez de la teoría neoclásicaDe EverandTeoría del capital y la distribución: Análisis de la validez de la teoría neoclásicaAún no hay calificaciones
- NOMENCLATURA PARTE 5 (ALUMNOS) Ok PRIMERA PARTEDocumento37 páginasNOMENCLATURA PARTE 5 (ALUMNOS) Ok PRIMERA PARTEJ Luis Ch100% (1)
- ARIMA Y VECTORES AUTORREGRESIVOS Informe FinalDocumento42 páginasARIMA Y VECTORES AUTORREGRESIVOS Informe FinalHrLexAún no hay calificaciones
- Regresión LinealDocumento28 páginasRegresión Linealfernanda ulloaAún no hay calificaciones
- Modelo LogitDocumento5 páginasModelo LogitMireya HuanquiAún no hay calificaciones
- Gestión Del Desempeño Social y Gestión de Riesgos en Entidades FinancierasDocumento6 páginasGestión Del Desempeño Social y Gestión de Riesgos en Entidades FinancierasTrueliftAún no hay calificaciones
- Hipotesis de Expectativas Adaptativas y Racionales de Alejo MacayaDocumento16 páginasHipotesis de Expectativas Adaptativas y Racionales de Alejo MacayaFrancisco Gurrola100% (1)
- Ejercicios y Casos Prácticos Con Datos de Corte Transversal para La Iniciación A La EconometríaDocumento70 páginasEjercicios y Casos Prácticos Con Datos de Corte Transversal para La Iniciación A La EconometríaEmma Liciu0% (1)
- Diapositivas T1 EconometriaDocumento33 páginasDiapositivas T1 EconometriaAitor Corral GonzalezAún no hay calificaciones
- Ingenieria EconomicaDocumento19 páginasIngenieria EconomicaLucia ValerioAún no hay calificaciones
- Modelos Regresión Lineal para Predecir El Precio de ViviendasDocumento41 páginasModelos Regresión Lineal para Predecir El Precio de ViviendasJuan PerezAún no hay calificaciones
- Modelo EconométricoDocumento15 páginasModelo EconométricoJovy G SolisAún no hay calificaciones
- Tasa Libre de RiesgoDocumento4 páginasTasa Libre de RiesgoVanessa BarreraAún no hay calificaciones
- Matemáticas Financieras Rodríguez, Pierdant, Rodríguez PDFDocumento32 páginasMatemáticas Financieras Rodríguez, Pierdant, Rodríguez PDFKarem Michelle Mondragon VarelaAún no hay calificaciones
- Pruebas y Soluciones Macro I-DeGDocumento186 páginasPruebas y Soluciones Macro I-DeGRicardo MeryAún no hay calificaciones
- Libro de Matemática Acturial FinalDocumento136 páginasLibro de Matemática Acturial FinalLuisa Riera0% (1)
- Pbi Calculo - TeoríaDocumento48 páginasPbi Calculo - Teoríadsflores1Aún no hay calificaciones
- Modelo de Retardos Distribuidos FinitosDocumento3 páginasModelo de Retardos Distribuidos FinitosLadymaria GomezllanqueAún no hay calificaciones
- Econometria 2Documento21 páginasEconometria 2loreta fernandezAún no hay calificaciones
- Estimacion de Modelos de Ecuaciones SimultaneasDocumento12 páginasEstimacion de Modelos de Ecuaciones SimultaneasSalvador Membrive YesteAún no hay calificaciones
- Formas CuadráticasDocumento19 páginasFormas CuadráticasFederico Castello RojoAún no hay calificaciones
- 4.mínimos Cuadrados OrdinariosDocumento66 páginas4.mínimos Cuadrados Ordinariospatty100% (1)
- DSGE Caso EcuadorDocumento48 páginasDSGE Caso EcuadorizkxAún no hay calificaciones
- Sesión 03 PDFDocumento38 páginasSesión 03 PDFHermanos Julcamoro CortezAún no hay calificaciones
- Valor Presente Serie de Pagos AnticipadosDocumento6 páginasValor Presente Serie de Pagos Anticipadoselizab207Aún no hay calificaciones
- Capitulo 10 de Wooldridge Econometria FilminaDocumento8 páginasCapitulo 10 de Wooldridge Econometria FilminaGreminger MaximilianoAún no hay calificaciones
- Mco para Cortes Transversales y Series de TiempoDocumento21 páginasMco para Cortes Transversales y Series de TiempoJuan Alejandro Perez ContrerasAún no hay calificaciones
- Teoría de PortafolioDocumento79 páginasTeoría de Portafoliojuean eduardo ChiroqueAún no hay calificaciones
- Tema 1 EconometriaDocumento56 páginasTema 1 EconometriaJesus MoraAún no hay calificaciones
- Opciones 1Documento116 páginasOpciones 1Jose de Jesus Cruz UrrutiaAún no hay calificaciones
- Nota Outreg2Documento2 páginasNota Outreg2Aremy TestarossaAún no hay calificaciones
- Capitalizacion y DescuentosDocumento38 páginasCapitalizacion y DescuentosXavier DiazAún no hay calificaciones
- Econometria 2Documento17 páginasEconometria 2Carolaine FariasAún no hay calificaciones
- Prese Programa ACPEF-140Documento28 páginasPrese Programa ACPEF-140Pedro OlivaresAún no hay calificaciones
- Ejercicios Resueltos - Estimación de Ecuaciones SimultáneasDocumento29 páginasEjercicios Resueltos - Estimación de Ecuaciones SimultáneasAlejandro Lemus GonzalezAún no hay calificaciones
- 6to Econometria IIDocumento6 páginas6to Econometria IIIvánVillanuevaGavidiaAún no hay calificaciones
- Introducción A Eviews 7Documento83 páginasIntroducción A Eviews 7Carlos Vasco100% (1)
- Ecuaciones SimultaneasDocumento15 páginasEcuaciones SimultaneasArthur VelásquezAún no hay calificaciones
- 03 Modelos Autorregresivos y VARDocumento51 páginas03 Modelos Autorregresivos y VAROmarBarrientosAún no hay calificaciones
- 1 Modelos de Regresion Con Variables Dicotomas 1Documento13 páginas1 Modelos de Regresion Con Variables Dicotomas 1Yanel NaderAún no hay calificaciones
- Formulas Matematica FinancieraDocumento4 páginasFormulas Matematica FinancieraAraceli Caihuara100% (1)
- Regresion Lineal MultipleDocumento29 páginasRegresion Lineal MultipleMiguel PalaciosAún no hay calificaciones
- Material Teoría CrecimientoDocumento23 páginasMaterial Teoría CrecimientoJuan PalominoAún no hay calificaciones
- James Otis - CAP 3 Y 4Documento22 páginasJames Otis - CAP 3 Y 4ValentinaMontesAún no hay calificaciones
- Clase 02 - AdicionalDocumento107 páginasClase 02 - Adicionalyudel M chAún no hay calificaciones
- Trabajo FinanzasDocumento6 páginasTrabajo Finanzasana paradaAún no hay calificaciones
- Gestión financiera del capital de trabajo en la empresaDe EverandGestión financiera del capital de trabajo en la empresaAún no hay calificaciones
- Microeconomía del equilibrio generalDe EverandMicroeconomía del equilibrio generalAún no hay calificaciones
- Modelos de evaluación de riesgo en decisiones financierasDe EverandModelos de evaluación de riesgo en decisiones financierasAún no hay calificaciones
- Plan de cuentas para sistemas contables 2021De EverandPlan de cuentas para sistemas contables 2021Aún no hay calificaciones
- Hoja de Cálculo de Laboratorio Laboratorio 06 de Física General - CERDocumento6 páginasHoja de Cálculo de Laboratorio Laboratorio 06 de Física General - CERJ Luis ChAún no hay calificaciones
- Ejercicio de Calculo 2Documento2 páginasEjercicio de Calculo 2J Luis ChAún no hay calificaciones
- Cuadros Estadisticos MMM 2024 2027Documento42 páginasCuadros Estadisticos MMM 2024 2027J Luis ChAún no hay calificaciones
- Fint Modelo Prestamos AdelantafosDocumento2 páginasFint Modelo Prestamos AdelantafosJ Luis ChAún no hay calificaciones
- Tema 6 Equilibrio en El Mercado de Bienes en Economías AbiertasDocumento27 páginasTema 6 Equilibrio en El Mercado de Bienes en Economías AbiertasJ Luis ChAún no hay calificaciones
- Reporte de Laboratorio Laboratorio 06 de Física General - CERDocumento3 páginasReporte de Laboratorio Laboratorio 06 de Física General - CERJ Luis ChAún no hay calificaciones
- Modelo Mundell - FlemingDocumento41 páginasModelo Mundell - FlemingJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 2 - Revisión Del IntentoDocumento6 páginasCONTROL DE LECTURA No 2 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- Fint Black y Scholes ExcelDocumento1 páginaFint Black y Scholes ExcelJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 3 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 3 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- Semana 5 Tema 9 Identificación de Proyectos de Inversión PúblicaDocumento62 páginasSemana 5 Tema 9 Identificación de Proyectos de Inversión PúblicaJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 1 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 1 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 4 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 4 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- LecturasDocumento122 páginasLecturasJ Luis ChAún no hay calificaciones
- NOMENCLATURA PARTE 1 (ALUMNOS) OkDocumento47 páginasNOMENCLATURA PARTE 1 (ALUMNOS) OkJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 1 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 1 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 4 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 4 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- CONTROL DE LECTURA No 3 - Revisión Del IntentoDocumento5 páginasCONTROL DE LECTURA No 3 - Revisión Del IntentoJ Luis ChAún no hay calificaciones
- Caso EF02Documento2 páginasCaso EF02J Luis ChAún no hay calificaciones
- NOMENCLATURA PARTE 2 (ALUMNOS) Ok PRIMERA PARTEDocumento114 páginasNOMENCLATURA PARTE 2 (ALUMNOS) Ok PRIMERA PARTEJ Luis ChAún no hay calificaciones
- Semana 4 Tema 7 Formulacion y Evaluacion de Proyectos de Inversion PublicaDocumento44 páginasSemana 4 Tema 7 Formulacion y Evaluacion de Proyectos de Inversion PublicaJ Luis ChAún no hay calificaciones
- Taborda, Saúl, Julián Vargas (Novela)Documento321 páginasTaborda, Saúl, Julián Vargas (Novela)EmmanuelAún no hay calificaciones
- Antijuricidad DeontologíaDocumento3 páginasAntijuricidad DeontologíaLibardoAún no hay calificaciones
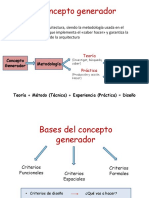
- Concepto GeneradorDocumento7 páginasConcepto GeneradorPaola Yépez100% (1)
- Museo Arqueologico y de Sitio en Malinalco Tesis de Arquitectura PDFDocumento224 páginasMuseo Arqueologico y de Sitio en Malinalco Tesis de Arquitectura PDFJonathan Sanchez100% (1)
- Responsabilidad Penal InternacionalDocumento19 páginasResponsabilidad Penal InternacionalMaria Camila CarreñoAún no hay calificaciones
- Clase 1Documento39 páginasClase 1KAREN SAMANTHA PANAMITO REYESAún no hay calificaciones
- Estudio de Los Casos Barbie y KenDocumento4 páginasEstudio de Los Casos Barbie y KenCompu Servicios Aguilera Trabajos UniversitariosAún no hay calificaciones
- Taller N 2Documento2 páginasTaller N 2Daniel ValeroAún no hay calificaciones
- Acontecimientos Mundiales de 1945 Al 2000 para Sexto Grado de PrimariaDocumento2 páginasAcontecimientos Mundiales de 1945 Al 2000 para Sexto Grado de Primariageostruct100% (1)
- La Mujer de La EliteDocumento9 páginasLa Mujer de La EliteSolange Cea50% (2)
- Antón ChejóvDocumento4 páginasAntón Chejóvmarta100% (1)
- Universidad Nacional Autónoma de HondurasDocumento5 páginasUniversidad Nacional Autónoma de HondurasleyliAún no hay calificaciones
- Evaluación Recuperación Final Filosofía Décimo 3pDocumento3 páginasEvaluación Recuperación Final Filosofía Décimo 3pDANA VALENTINA OCHOA HERRERAAún no hay calificaciones
- Estudiantes Matriculados en La UMSA, Gestión 2018Documento44 páginasEstudiantes Matriculados en La UMSA, Gestión 2018jhnnarivsilAún no hay calificaciones
- La Gente, La Leña, El Monte: No (Sólo) Se Hace Leña Del Árbol CaídoDocumento32 páginasLa Gente, La Leña, El Monte: No (Sólo) Se Hace Leña Del Árbol CaídoBernarda MarconettoAún no hay calificaciones
- La Lírica y La Métrica Esplicado.Documento31 páginasLa Lírica y La Métrica Esplicado.Malena Mayorga MejíasAún no hay calificaciones
- Musica PrecolombinaDocumento5 páginasMusica PrecolombinaAnonymous LbXaayAún no hay calificaciones
- Arquitectura en Linea de TiempoDocumento16 páginasArquitectura en Linea de TiempoCesar Bossa100% (1)
- Manual Capacitacion Parental EITAFDocumento144 páginasManual Capacitacion Parental EITAFMar Ber100% (1)
- Sistema de Surfactante PulmonarDocumento29 páginasSistema de Surfactante PulmonarJoanna C. AlfaroAún no hay calificaciones
- Mandalas TDHDocumento74 páginasMandalas TDHMaria Isabel Marval100% (1)
- Relación Arte CienciaDocumento2 páginasRelación Arte Ciencialea2mgaAún no hay calificaciones
- Practica 6 Ruta Estatica ConfiguracionDocumento31 páginasPractica 6 Ruta Estatica ConfiguracionCarlos Danniel FloresAún no hay calificaciones
- Informe de Lineamientos TopográficosDocumento13 páginasInforme de Lineamientos TopográficosEdwin Aranzalez Mariño100% (1)
- Oración Enseñanza Básica y Media Del 28 Al31 de MarzoDocumento13 páginasOración Enseñanza Básica y Media Del 28 Al31 de MarzoCristhian Ignacio Peñailillo CastilloAún no hay calificaciones
- Práctica 0 Laboratorio de Física 1Documento25 páginasPráctica 0 Laboratorio de Física 1delia donisAún no hay calificaciones
- Tutela Aquiliana en ContratosDocumento32 páginasTutela Aquiliana en Contratosval3sk6320100% (1)
- CARBOHIDRATOSDocumento43 páginasCARBOHIDRATOSIvan Alberto NinaAún no hay calificaciones
- fichaTecnicaNeopreno PDFDocumento1 páginafichaTecnicaNeopreno PDFAlexander LópezAún no hay calificaciones
- Experiencia 09 Actividad 1 Semana 28 Primer AñoDocumento1 páginaExperiencia 09 Actividad 1 Semana 28 Primer Añojose giraldoAún no hay calificaciones