También podría gustarte
- 1.2 Álgebra Vectorial y Su GeometríaDocumento33 páginas1.2 Álgebra Vectorial y Su GeometríaLimber Leonardo Velasco TehAún no hay calificaciones
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Ais Del Adolescente Agudezavisual y AuditivaDocumento14 páginasAis Del Adolescente Agudezavisual y AuditivaIvan FerrandizAún no hay calificaciones
- Tensión de Paso y de ContactoDocumento4 páginasTensión de Paso y de ContactoYordan ChavezAún no hay calificaciones
- Historia Hormigon EstructuralDocumento115 páginasHistoria Hormigon EstructuralEduardo Cesar GentileAún no hay calificaciones
- Alg Lineal Clases 2023-1Documento80 páginasAlg Lineal Clases 2023-1Alex Bastián Flores AillónAún no hay calificaciones
- VECTORES EN R2 y R3Documento23 páginasVECTORES EN R2 y R3lorenita272829100% (1)
- Algebra Lineal 5Documento33 páginasAlgebra Lineal 5TetoKusanagiAún no hay calificaciones
- Vectores en 2D y 3DDocumento27 páginasVectores en 2D y 3DFernanda Palacios ReyesAún no hay calificaciones
- PRIMER TRABAJO Resistencia de MaterialesDocumento23 páginasPRIMER TRABAJO Resistencia de MaterialesNick Ramos ChavezAún no hay calificaciones
- Calculo Vectorial Unidad 1 RosaraDocumento11 páginasCalculo Vectorial Unidad 1 RosaraKaren JiménezAún no hay calificaciones
- Vector EsDocumento7 páginasVector EsNick Ramos ChavezAún no hay calificaciones
- Resumen de Vectorec Geometria Analitica.Documento14 páginasResumen de Vectorec Geometria Analitica.CRISTHIAM SEBASTIAN FONSECA MENDOZAAún no hay calificaciones
- Rectas y Planos en El EspacioDocumento14 páginasRectas y Planos en El Espaciowilliam avilaAún no hay calificaciones
- Vectores Apuntes de ClaseDocumento32 páginasVectores Apuntes de ClaseangelAún no hay calificaciones
- Taller 1 Calculo VectorialDocumento5 páginasTaller 1 Calculo VectorialchompirassAún no hay calificaciones
- 4 Vectores 1 2023Documento19 páginas4 Vectores 1 2023DAVID ALEJANDRO SEGURA RODRIGUEZAún no hay calificaciones
- 1.1. Repaso de Vectores, Rectas y PlanosDocumento12 páginas1.1. Repaso de Vectores, Rectas y PlanosAsimaiko VelaAún no hay calificaciones
- Vectores, Rectas y PlanosDocumento14 páginasVectores, Rectas y PlanosLeonardo PiconAún no hay calificaciones
- Vectores, Rectas y PlanosDocumento12 páginasVectores, Rectas y PlanosAngelo Tomás Jiménez P.Aún no hay calificaciones
- Trabajo de Investigación MatemáticaDocumento15 páginasTrabajo de Investigación MatemáticaKarla MonseAún no hay calificaciones
- Unidad 1 VectoresDocumento59 páginasUnidad 1 Vectoresclaudia nkAún no hay calificaciones
- Teoría de VectoresDocumento5 páginasTeoría de VectoressandraAún no hay calificaciones
- Clase3 4Documento9 páginasClase3 4johnape100% (6)
- 1.1. - Vectores.Documento9 páginas1.1. - Vectores.Iris Eddaly Cruz TrujilloAún no hay calificaciones
- Notas Teóricas Unidad 2Documento18 páginasNotas Teóricas Unidad 2Enrique Fernandini MatosAún no hay calificaciones
- Vectores en R2 y R3: Teoría y EjemplosDocumento29 páginasVectores en R2 y R3: Teoría y EjemplosVàsquezAún no hay calificaciones
- Rectas en El Espacio R3Documento10 páginasRectas en El Espacio R3danytAún no hay calificaciones
- Espacio Vectorial Tridimensional y Lineas RectasDocumento9 páginasEspacio Vectorial Tridimensional y Lineas RectasJBCristopherAún no hay calificaciones
- Algebra lineal - Determinantes - Vectores y operacionesDocumento8 páginasAlgebra lineal - Determinantes - Vectores y operacionesbsarmiento65Aún no hay calificaciones
- Cálculo vectorial: Introducción a los vectores y álgebra vectorialDocumento12 páginasCálculo vectorial: Introducción a los vectores y álgebra vectorialAlexsandro Love MusicAún no hay calificaciones
- AlgLineal Unidad 5Documento35 páginasAlgLineal Unidad 5irvalramAún no hay calificaciones
- Sesion 02Documento15 páginasSesion 02Alejandra FonsecaAún no hay calificaciones
- C03 Norma de VectoresDocumento29 páginasC03 Norma de Vectoresvictor ramirezAún no hay calificaciones
- TEORIA 6 - VECTORESDocumento17 páginasTEORIA 6 - VECTORESCristian RamírezAún no hay calificaciones
- Introducción a vectores en RnDocumento20 páginasIntroducción a vectores en RnCatalinaAún no hay calificaciones
- Curso básico de cálculo geométricoDocumento98 páginasCurso básico de cálculo geométricoJoseph Alfaro BazanAún no hay calificaciones
- Guía VectoresDocumento6 páginasGuía VectoresHERNÁNDEZ GONZÁLEZ ANDREA LIZETAún no hay calificaciones
- Vectores y Geom en El EspacioDocumento6 páginasVectores y Geom en El EspacioGeorge FernandezAún no hay calificaciones
- Algebra VectorialDocumento5 páginasAlgebra VectorialsestofranciscoAún no hay calificaciones
- UA1VECTORES Y GEOMETRÍA DEL ESPACIO (Parte 1)Documento35 páginasUA1VECTORES Y GEOMETRÍA DEL ESPACIO (Parte 1)Israel ColqueAún no hay calificaciones
- Apunte VectoresDocumento16 páginasApunte VectoresGeronimo MandriAún no hay calificaciones
- Material Docente - Vectores - 2022-01 - UNABDocumento27 páginasMaterial Docente - Vectores - 2022-01 - UNABFrancisco Silva VillarrealAún no hay calificaciones
- Puntos y Vectores en El Espacio: P (X, Y, Z) y ZDocumento16 páginasPuntos y Vectores en El Espacio: P (X, Y, Z) y Z132321alexAún no hay calificaciones
- VectoresDocumento24 páginasVectoresVictoria OrtizAún no hay calificaciones
- Vectores en r3Documento14 páginasVectores en r3Rodrigo Oncoy SanchezAún no hay calificaciones
- Vectores en R2Documento6 páginasVectores en R2un lectorAún no hay calificaciones
- Guia - No - 2 Vectores - Revis.21-01-2022-1Documento33 páginasGuia - No - 2 Vectores - Revis.21-01-2022-1Luis HolguinAún no hay calificaciones
- CAPITULO1Documento138 páginasCAPITULO1JOSE BERNABE GARCIA TREJOAún no hay calificaciones
- Contenido y Taller de Vectores en El PlanoDocumento21 páginasContenido y Taller de Vectores en El PlanojaredAún no hay calificaciones
- Vectores y Geometria en El EspacioDocumento19 páginasVectores y Geometria en El EspacioJavier's Torres VergaraAún no hay calificaciones
- Vectores en el planoDocumento45 páginasVectores en el planoMarie VchAún no hay calificaciones
- Álgebra Vectorial PDFDocumento26 páginasÁlgebra Vectorial PDFJean Carlos PimentelAún no hay calificaciones
- Unidad I Ecuaciones de La Recta y El PlanoDocumento13 páginasUnidad I Ecuaciones de La Recta y El PlanoJonatan GilAún no hay calificaciones
- Temas 1-3Documento42 páginasTemas 1-3vitalsetupsAún no hay calificaciones
- 2-Vectores (Teoría)Documento19 páginas2-Vectores (Teoría)Braian GodoyAún no hay calificaciones
- Coordenadas y Vectores en El EspacioDocumento40 páginasCoordenadas y Vectores en El EspacioMarvin Campos Gutierrez100% (2)
- TRIDIMENSIONALDocumento28 páginasTRIDIMENSIONALJBCristopherAún no hay calificaciones
- Vectores en R2 y R3Documento29 páginasVectores en R2 y R3Alexander Piscoya MarinAún no hay calificaciones
- Guía Matemática VectoresDocumento10 páginasGuía Matemática VectoresEdgar Rodriguez MartinezAún no hay calificaciones
- Unid 4 Vectores Espacios Vectoriales-1 PDFDocumento15 páginasUnid 4 Vectores Espacios Vectoriales-1 PDFMilagros SoriaAún no hay calificaciones
- Sobre Nilálgebras Conmutativas de Potencias AsociativasDe EverandSobre Nilálgebras Conmutativas de Potencias AsociativasAún no hay calificaciones
- Informe 8 - Trabajo y La EnergíaDocumento4 páginasInforme 8 - Trabajo y La Energíajeison maresAún no hay calificaciones
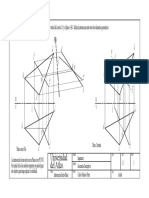
- Interseccion Recta-Volumen-ModelDocumento1 páginaInterseccion Recta-Volumen-Modeljeison maresAún no hay calificaciones
- Interseccion Recta-Volumen 2-ModelDocumento1 páginaInterseccion Recta-Volumen 2-Modeljeison maresAún no hay calificaciones
- INTERSECCIÓN Y DESARROLLO DE DOS CILINDROS DE IGUAL DIAMETRO EN ANGULO DIFERENTE DE 90°-ModelDocumento1 páginaINTERSECCIÓN Y DESARROLLO DE DOS CILINDROS DE IGUAL DIAMETRO EN ANGULO DIFERENTE DE 90°-Modeljeison maresAún no hay calificaciones
- INTERSECCIÓN Y DESARROLLO DE DOS CILINDROS DE IGUAL DIAMETRO-ModelDocumento1 páginaINTERSECCIÓN Y DESARROLLO DE DOS CILINDROS DE IGUAL DIAMETRO-Modeljeison maresAún no hay calificaciones
- Interseccion Plano-Volumen-ModelDocumento1 páginaInterseccion Plano-Volumen-Modeljeison maresAún no hay calificaciones
- Interseccion Recta-Plano-ModelDocumento1 páginaInterseccion Recta-Plano-Modeljeison maresAún no hay calificaciones
- Intersección de Planos-ModelDocumento1 páginaIntersección de Planos-Modeljeison maresAún no hay calificaciones
- Vectores en ingeniería mecánicaDocumento2 páginasVectores en ingeniería mecánicajeison maresAún no hay calificaciones
- Intersección de Volumenes-ModelDocumento1 páginaIntersección de Volumenes-Modeljeison maresAún no hay calificaciones
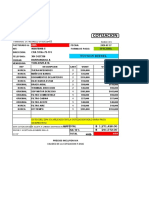
- Cotización de repuestos para camión dieselDocumento1 páginaCotización de repuestos para camión dieseljeison maresAún no hay calificaciones
- Segundo Corte - 2 Taller - 2022-1Documento2 páginasSegundo Corte - 2 Taller - 2022-1jeison maresAún no hay calificaciones
- ANTENA HELICOIDAL - IsabelCastilloDocumento5 páginasANTENA HELICOIDAL - IsabelCastilloIsabelAguirreAún no hay calificaciones
- Unidad 0.4 Cuartiles, Deciles y PercentilesDocumento14 páginasUnidad 0.4 Cuartiles, Deciles y PercentilesJavier AndresAún no hay calificaciones
- F2 - S07 - HT - Ec. Continuidad y BernoulliDocumento2 páginasF2 - S07 - HT - Ec. Continuidad y BernoulliNOCTURN & NIGHT BLACKAún no hay calificaciones
- Memoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Documento24 páginasMemoria de Calculo Boxcoulvert 1X1X5MTS Parcelas El Brillante-Guaranda.Alvaro Manuel Ruiz CardonaAún no hay calificaciones
- Econometría: Ing. Esp. Keyla Stefanía Guerrero Ruiz, MegcpDocumento14 páginasEconometría: Ing. Esp. Keyla Stefanía Guerrero Ruiz, MegcpemelyAún no hay calificaciones
- Electricidad SolarDocumento7 páginasElectricidad SolarDavid CatotaAún no hay calificaciones
- Clase-Química OctubreDocumento41 páginasClase-Química OctubreKatherine Peralta CruzAún no hay calificaciones
- Ficha 8Documento3 páginasFicha 8Nancy San Martin H.Aún no hay calificaciones
- Elasticidad Y Plasticidad - Informe de Libros - Josemcr3 PDFDocumento5 páginasElasticidad Y Plasticidad - Informe de Libros - Josemcr3 PDFMARCÜZAún no hay calificaciones
- FT 21 002 Canal UpnDocumento2 páginasFT 21 002 Canal UpnAnuviz03Aún no hay calificaciones
- Circuito Electrico MixtoDocumento7 páginasCircuito Electrico MixtoElvis AguilarAún no hay calificaciones
- VoltajeDocumento3 páginasVoltajeDickson VasquezAún no hay calificaciones
- Ultrasonido Nivel II: Ondas, Propagación y AplicacionesDocumento11 páginasUltrasonido Nivel II: Ondas, Propagación y AplicacionesJHONAún no hay calificaciones
- Combinaciones binarias no oxigenadas: hidruros, ácidos hidrácidos y compuestos especialesDocumento10 páginasCombinaciones binarias no oxigenadas: hidruros, ácidos hidrácidos y compuestos especialesDerlis GayozoAún no hay calificaciones
- Código de Colores ResistenciasDocumento8 páginasCódigo de Colores ResistenciasNicolas JacomeAún no hay calificaciones
- CARBÓNDocumento15 páginasCARBÓNDipal DompalAún no hay calificaciones
- Taller 2Documento6 páginasTaller 2Maria Camila AlvarezAún no hay calificaciones
- Resultado de Aprendizaje Unidad 2 MatematicasDocumento8 páginasResultado de Aprendizaje Unidad 2 Matematicasmario alberto vasquez ramirezAún no hay calificaciones
- I Definici OnDocumento9 páginasI Definici OnCesar SotoAún no hay calificaciones
- Proyecto 2Documento27 páginasProyecto 2LUIS ISMAEL SANCHEZ ZAPANAAún no hay calificaciones
- Guía 4. Balances de Materia Sin Reacción Química en Unidades SimplesDocumento2 páginasGuía 4. Balances de Materia Sin Reacción Química en Unidades SimplesJuan SandovalAún no hay calificaciones
- Tipos de Controles Eléctricos Melo HuamanDocumento4 páginasTipos de Controles Eléctricos Melo HuamanBruno MeloAún no hay calificaciones
- Cotiz. ACUMULADORES 00161 - 2022 SIGNIA LURIN - Bateria 36 VDC 972 AH - NUEVA EXIDEDocumento2 páginasCotiz. ACUMULADORES 00161 - 2022 SIGNIA LURIN - Bateria 36 VDC 972 AH - NUEVA EXIDERAUL GONSALESAún no hay calificaciones
- Practica Unidad 3Documento4 páginasPractica Unidad 3deyris hormistaAún no hay calificaciones
- Apuntes de Dinámica 1 PDFDocumento23 páginasApuntes de Dinámica 1 PDFJean Carlos PimentelAún no hay calificaciones
- DilatómetroDocumento10 páginasDilatómetroAndres LionAún no hay calificaciones
- Termodinámica Capítulo CiclosDocumento22 páginasTermodinámica Capítulo CiclosBryan RiveraAún no hay calificaciones