También podría gustarte
- Sistemas Lineales e Invariantes en El TiempoDocumento34 páginasSistemas Lineales e Invariantes en El TiempoelcanoeroAún no hay calificaciones
- Señales Sistemas DiscretosDocumento28 páginasSeñales Sistemas DiscretosGuille LRAún no hay calificaciones
- Curso básico de teoría de númerosDe EverandCurso básico de teoría de númerosCalificación: 5 de 5 estrellas5/5 (2)
- Convo Luci OnDocumento6 páginasConvo Luci OnGabriela Mayorga SanchezAún no hay calificaciones
- pr02 Sistemas PDFDocumento13 páginaspr02 Sistemas PDFErinson Javier Toscano RojasAún no hay calificaciones
- Convolucion Lineal Discreta y Convolucion Circular PaperDocumento4 páginasConvolucion Lineal Discreta y Convolucion Circular PaperMiguel VelascoAún no hay calificaciones
- Capitulo 7 Convolucion DiscretaDocumento27 páginasCapitulo 7 Convolucion Discretavallesportela100% (1)
- Clase2 Senales 2011Documento17 páginasClase2 Senales 2011ADRIANA MARCELA SEPULVEDA RINCONAún no hay calificaciones
- Proakis Ejercicios Cap 2Documento12 páginasProakis Ejercicios Cap 2Anonymous yeTg3p1faHAún no hay calificaciones
- Sistemas Continuos y DiscretosDocumento33 páginasSistemas Continuos y DiscretosAilyn Marisol CarreraAún no hay calificaciones
- Preguntas - Tarea 2 Señales y SistemasDocumento9 páginasPreguntas - Tarea 2 Señales y SistemasandresyateAún no hay calificaciones
- Clase 2 ConvolucionDocumento37 páginasClase 2 ConvolucionRoberto Carlos TiernoAún no hay calificaciones
- Procesamiento digital de señales en tiempo discretoDocumento40 páginasProcesamiento digital de señales en tiempo discretoAlejandra Zubieta JemioAún no hay calificaciones
- Practica 3Documento6 páginasPractica 3Noc DgAún no hay calificaciones
- Tarea 2 - Camila Vargas - 53Documento21 páginasTarea 2 - Camila Vargas - 53Camila Andrea Vargas AcostaAún no hay calificaciones
- Convolucion, CausalDocumento27 páginasConvolucion, CausalJorge Orrante Sakanassi100% (1)
- Convolucion CircularDocumento4 páginasConvolucion CircularCarlos Vallejo MoralesAún no hay calificaciones
- Lab2 PdsDocumento14 páginasLab2 PdsJoe Mochcco Santa CruzAún no hay calificaciones
- HTTP - Prof - Usb.ve Tperez Docencia 1421 Capi ProblemasResueltosCAP3Documento10 páginasHTTP - Prof - Usb.ve Tperez Docencia 1421 Capi ProblemasResueltosCAP3Orlando Colque CAún no hay calificaciones
- Senales y Sistemas Problemas Resueltos CDocumento10 páginasSenales y Sistemas Problemas Resueltos CJuan Carlos GuevaraAún no hay calificaciones
- Convolucion Lineal Discreta y Convolucion Circular PaperDocumento4 páginasConvolucion Lineal Discreta y Convolucion Circular PaperAlex CañarAún no hay calificaciones
- Dossier 2 Señales y Sistemas (Mayo 2019)Documento26 páginasDossier 2 Señales y Sistemas (Mayo 2019)Paul AráuzAún no hay calificaciones
- (PDS) Lab 03 Sdlit 17 IIDocumento8 páginas(PDS) Lab 03 Sdlit 17 IIqwer33Aún no hay calificaciones
- Enfriamiento de NewtonDocumento4 páginasEnfriamiento de NewtonJorge Joel Espejo GutierrezAún no hay calificaciones
- p3 14Documento6 páginasp3 14javirv19Aún no hay calificaciones
- ELT2522 P2 220 Firmado-RDocumento2 páginasELT2522 P2 220 Firmado-RFernando TapiaAún no hay calificaciones
- Deber EsquemasDocumento4 páginasDeber EsquemasCristopher Zavala ChaconAún no hay calificaciones
- Señales y Sistemas Unidad 2Documento30 páginasSeñales y Sistemas Unidad 2Jorge Fabian GualteroAún no hay calificaciones
- 1 3 Analisis de Señales ConvolucionDocumento21 páginas1 3 Analisis de Señales ConvolucionJosé AndradesAún no hay calificaciones
- AnSyS2022 - Teoria3 - Csistemas - LinealesDocumento51 páginasAnSyS2022 - Teoria3 - Csistemas - LinealesfaustoAún no hay calificaciones
- Taller 2 - Propiedades, Convolución y Análisis de Sistemas en Tiempo Discreto 2023Documento4 páginasTaller 2 - Propiedades, Convolución y Análisis de Sistemas en Tiempo Discreto 2023juan piñerosAún no hay calificaciones
- Capitulo 2Documento5 páginasCapitulo 2Angel CalleAún no hay calificaciones
- Practica 3 Operaciones Con Funciones Discretas Con MATLABDocumento6 páginasPractica 3 Operaciones Con Funciones Discretas Con MATLABRaissaPazVasquezAún no hay calificaciones
- Convolución DiscretaDocumento5 páginasConvolución DiscretaHumberto Ramírez GascaAún no hay calificaciones
- U2 - Actividad 4 - LeemeDocumento15 páginasU2 - Actividad 4 - LeemeIsmael OchoaAún no hay calificaciones
- Procesamiento de Señales: Convolución y Representación de SistemasDocumento12 páginasProcesamiento de Señales: Convolución y Representación de SistemasPuebla JapAún no hay calificaciones
- Pds Cap 04 Sist-Dlit 12Documento28 páginasPds Cap 04 Sist-Dlit 12Eleazar CastilloAún no hay calificaciones
- Guía de Procesamiento Digital de SeñalesDocumento5 páginasGuía de Procesamiento Digital de SeñalesMauricio LuqueAún no hay calificaciones
- Actividad Evaluativa Eje 4 Ecuaciones DiferencialesDocumento8 páginasActividad Evaluativa Eje 4 Ecuaciones DiferencialesJuan Camilo lara rojasAún no hay calificaciones
- Señales SISTEMAS LIT DISCRETOS: LA SUMA DE LA CONVOLUCIONDocumento8 páginasSeñales SISTEMAS LIT DISCRETOS: LA SUMA DE LA CONVOLUCIONK Nicole ThomeAún no hay calificaciones
- Articulo DosDocumento25 páginasArticulo DosIsabel LastraAún no hay calificaciones
- Solución Actividad Evaluativa Eje 4 - Ecuaciones DiferencialesDocumento8 páginasSolución Actividad Evaluativa Eje 4 - Ecuaciones Diferencialesfredy diazAún no hay calificaciones
- Tarea1 - Señales y SistemasDocumento25 páginasTarea1 - Señales y SistemasJuliana Suarez50% (2)
- XD Ec 2Documento13 páginasXD Ec 2Mauricio Gomez SarmientoAún no hay calificaciones
- Respuesta Al Impulso (Control)Documento9 páginasRespuesta Al Impulso (Control)AndresOrozcoMAún no hay calificaciones
- Tema 2 Analisis de Senales y de Sistemas Discretos en El Dominio Del TiempoDocumento57 páginasTema 2 Analisis de Senales y de Sistemas Discretos en El Dominio Del TiempoLuis Montana CamachoAún no hay calificaciones
- Apunte Unidad IIDocumento22 páginasApunte Unidad IIJavier Veloz MuñozAún no hay calificaciones
- Convolucion DiscretaDocumento11 páginasConvolucion DiscretaFranco RaosAún no hay calificaciones
- El Metodo de Newton-Raphson - La Alternativa Del Ingeniero para Resolver Sistemas de Ecuaciones No LDocumento5 páginasEl Metodo de Newton-Raphson - La Alternativa Del Ingeniero para Resolver Sistemas de Ecuaciones No LTsiseje BMAún no hay calificaciones
- AyPS TP2 2023Documento4 páginasAyPS TP2 2023Jaime Pacheco SilvaAún no hay calificaciones
- Extremos en SucesionesDocumento5 páginasExtremos en SucesionesRICARDO LUCIO MAMANI SUCAAún no hay calificaciones
- Señales y Sistemas Unidad 2.2Documento30 páginasSeñales y Sistemas Unidad 2.2Jorge Fabian GualteroAún no hay calificaciones
- I Fase Control - II - Ecuaciones en DiferenciasDocumento28 páginasI Fase Control - II - Ecuaciones en DiferenciasGabriel Llerena QuenayaAún no hay calificaciones
- Guia EjerciciosDocumento36 páginasGuia EjerciciosRao RaoAún no hay calificaciones
- Informe Sistemas Dinámicos Control Tercero - DiegoDocumento12 páginasInforme Sistemas Dinámicos Control Tercero - DiegoAlejandro RiveraAún no hay calificaciones
- Regresión Lineal Múltiple - RLMDocumento14 páginasRegresión Lineal Múltiple - RLMYober Arteaga IreneAún no hay calificaciones
- 05 GrauVilalta Capitol 4Documento142 páginas05 GrauVilalta Capitol 4ale fgAún no hay calificaciones
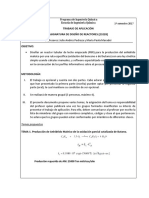
- Trabajo de Aplicación Diseño de Reactores 2017 1 MatlabDocumento4 páginasTrabajo de Aplicación Diseño de Reactores 2017 1 Matlabdiana betancourAún no hay calificaciones
- Calcula Valor Medio - Valor EficazDocumento2 páginasCalcula Valor Medio - Valor EficazAlonso MooriAún no hay calificaciones
- Ilu 2Documento116 páginasIlu 2Alonso MooriAún no hay calificaciones
- PETS - NS - 101 - Fusión de Hilo de Fibra ÓpticaDocumento5 páginasPETS - NS - 101 - Fusión de Hilo de Fibra ÓpticaBarrio Sarita Colonia100% (1)
- Gen Qua CSP 02 031 Rev 03 GeomemDocumento13 páginasGen Qua CSP 02 031 Rev 03 GeomemAlonso MooriAún no hay calificaciones
- Cajas ChinasDocumento20 páginasCajas ChinasGuillermo Gonzalez Arce100% (11)
- Calculo de Iluminacion en EscalerasDocumento13 páginasCalculo de Iluminacion en EscalerasAlonso MooriAún no hay calificaciones
- PD-TL-18-PRO-027-A Procedimiento de Instalación de Soportes, Paneles y Equipos Asociados A Instrumentación PDFDocumento8 páginasPD-TL-18-PRO-027-A Procedimiento de Instalación de Soportes, Paneles y Equipos Asociados A Instrumentación PDFAlonso MooriAún no hay calificaciones
- Procedimiento de Instalación de Soportes Paneles y Equipos Asociados A InstrumentaciónDocumento13 páginasProcedimiento de Instalación de Soportes Paneles y Equipos Asociados A InstrumentaciónAlonso MooriAún no hay calificaciones
- Manual en Español Nfs-320 Tablero Contra IncendiosDocumento76 páginasManual en Español Nfs-320 Tablero Contra IncendiosInge J Mos M100% (2)
- Guía 1 - Reflexión Individual de La Práctica DocenteDocumento4 páginasGuía 1 - Reflexión Individual de La Práctica DocenteJuan DiegoAún no hay calificaciones
- AyudaDocumento13 páginasAyudaJhon CondeAún no hay calificaciones
- Contabilidad BásicaDocumento14 páginasContabilidad BásicaLourdes Josefina Cardozo Rodriguez100% (1)
- BiomecanicaDocumento10 páginasBiomecanicaJenny Vargas RuizAún no hay calificaciones
- Ecología PoblacionesDocumento50 páginasEcología PoblacionesMichael ZúñigaAún no hay calificaciones
- Mezclas Tibias AmaacDocumento36 páginasMezclas Tibias AmaacGuillermoAún no hay calificaciones
- Gestión de materiales y producciónDocumento16 páginasGestión de materiales y producciónBertie26Aún no hay calificaciones
- Fua Cod 001 - Control CredDocumento18 páginasFua Cod 001 - Control CredUNIDAD DE SEGUROS DIRESA PASCOAún no hay calificaciones
- Semana 4. Taller Intervalos de Confianza y Tamaño de MuestraDocumento3 páginasSemana 4. Taller Intervalos de Confianza y Tamaño de MuestraDayan Niño0% (4)
- Practica 3 Lab IIIDocumento6 páginasPractica 3 Lab IIIAnonymous FCODTbH3aAún no hay calificaciones
- Universidad Mariano Galvez de Guatemala: Ingenieria Industrial Diario Vespertina Acta 35-17 9.04 2017-05-24Documento2 páginasUniversidad Mariano Galvez de Guatemala: Ingenieria Industrial Diario Vespertina Acta 35-17 9.04 2017-05-24Alejandro GarciaAún no hay calificaciones
- Detector microondasDocumento5 páginasDetector microondasRaziel MedinaAún no hay calificaciones
- Depositos IocgDocumento33 páginasDepositos IocgNoePalpánCosme0% (2)
- El MédicoDocumento2 páginasEl MédicoNery HernandezAún no hay calificaciones
- Tipos de EncapsuladosDocumento1 páginaTipos de Encapsuladoscarlos andres montesAún no hay calificaciones
- Sucesiones y SeriesDocumento6 páginasSucesiones y SeriesHugo CaballeroAún no hay calificaciones
- Catálogo de Máquinas de Gimnasio PDF - Línea Luxuty ConvergentesDocumento35 páginasCatálogo de Máquinas de Gimnasio PDF - Línea Luxuty ConvergentesToni GutierrezAún no hay calificaciones
- Presentacion ProyectoDocumento17 páginasPresentacion ProyectoJesus Angel Moran CastilloAún no hay calificaciones
- Practica Toma de DesicionesDocumento4 páginasPractica Toma de Desicionesjoel_va133% (3)
- Análisis del HTP: Interpretación del test psicológico HTP de LauraDocumento3 páginasAnálisis del HTP: Interpretación del test psicológico HTP de LauraClaudia Román87% (23)
- 07 GUAMAN CALI ELVIA ASUNCION-signedDocumento1 página07 GUAMAN CALI ELVIA ASUNCION-signedFranco Arman RobinzAún no hay calificaciones
- ELIPSEDocumento4 páginasELIPSEPedro Cuyate100% (4)
- Clase 8 BCP y DRPDocumento36 páginasClase 8 BCP y DRPAlejandro Mejicanos JuárezAún no hay calificaciones
- Contrato Servicio de Mantencion CBRE 20191212 141009Documento19 páginasContrato Servicio de Mantencion CBRE 20191212 141009Magdiel AlexandroAún no hay calificaciones
- Examen de Aritmetica-Cuarto Año SecDocumento2 páginasExamen de Aritmetica-Cuarto Año SecJose Paiva MozoAún no hay calificaciones
- CV Roman Pairumani AjacopaDocumento16 páginasCV Roman Pairumani AjacopadeivyAún no hay calificaciones
- RESUMEN Comprender y Transformar La Enseñanza. Gimeno SacristanDocumento3 páginasRESUMEN Comprender y Transformar La Enseñanza. Gimeno SacristanOlga Morales de los Santos68% (22)
- Listado de Las Reuniones Del Asfalto 2007Documento27 páginasListado de Las Reuniones Del Asfalto 2007Gerson CarrascoAún no hay calificaciones
- Vías Intravenosas: Administración y ProcedimientoDocumento8 páginasVías Intravenosas: Administración y ProcedimientoDiegoAún no hay calificaciones
- Los Efectos de Los Lubricantes en La Salud Humana.Documento11 páginasLos Efectos de Los Lubricantes en La Salud Humana.Gabriela Arreaga MgalAún no hay calificaciones
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Didáctica de la matemática en la escuela primariaDe EverandDidáctica de la matemática en la escuela primariaCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Estadística básica: Introducción a la estadística con RDe EverandEstadística básica: Introducción a la estadística con RCalificación: 5 de 5 estrellas5/5 (8)
- La Teoría de Conjuntos y los Fundamentos de las MatemáticasDe EverandLa Teoría de Conjuntos y los Fundamentos de las MatemáticasCalificación: 5 de 5 estrellas5/5 (1)
- Neurocuántica: La nueva frontera de la neurocienciaDe EverandNeurocuántica: La nueva frontera de la neurocienciaCalificación: 5 de 5 estrellas5/5 (1)
- El método de los elementos finitos: Un enfoque teórico prácticoDe EverandEl método de los elementos finitos: Un enfoque teórico prácticoCalificación: 3 de 5 estrellas3/5 (4)
- Mentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraDe EverandMentalidades matemáticas: Cómo liberar el potencial de los estudiantes mediante las matemáticas creativas, mensajes inspiradores y una enseñanza innovadoraCalificación: 4.5 de 5 estrellas4.5/5 (5)
- Problemas de física general en un año olímpicoDe EverandProblemas de física general en un año olímpicoCalificación: 5 de 5 estrellas5/5 (1)
- Matemáticas financierasDe EverandMatemáticas financierasCalificación: 4 de 5 estrellas4/5 (7)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Enseñar Matemática hoy: Miradas, sentidos y desafíosDe EverandEnseñar Matemática hoy: Miradas, sentidos y desafíosCalificación: 5 de 5 estrellas5/5 (1)
- Física cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasDe EverandFísica cuántica para principiantes: Descubra los fundamentos de la mecánica cuántica y cómo afecta al mundo en que vivimos a través de todas sus teorías más famosasCalificación: 5 de 5 estrellas5/5 (4)
- Mil ejercicios de preparación física (2 Vol)De EverandMil ejercicios de preparación física (2 Vol)Calificación: 3 de 5 estrellas3/5 (5)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- NIKOLA TESLA: Mis Inventos - AutobiografiaDe EverandNIKOLA TESLA: Mis Inventos - AutobiografiaCalificación: 4.5 de 5 estrellas4.5/5 (2)
- Diseño y construcción de algoritmosDe EverandDiseño y construcción de algoritmosCalificación: 4 de 5 estrellas4/5 (6)
- Proyectos de instalaciones eléctrica de baja tensiónDe EverandProyectos de instalaciones eléctrica de baja tensiónCalificación: 5 de 5 estrellas5/5 (1)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Fisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposDe EverandFisicoquímica II: Materia, electricidad y magnetismo. Fuerzas y camposAún no hay calificaciones
- Física paso a paso: Más de 100 problemas resueltosDe EverandFísica paso a paso: Más de 100 problemas resueltosCalificación: 4 de 5 estrellas4/5 (12)
- Mecánica cuántica para principiantesDe EverandMecánica cuántica para principiantesCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Visualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónDe EverandVisualización: Cambie su vida en cuatro semanas utilizando la ley de atracciónCalificación: 5 de 5 estrellas5/5 (18)