También podría gustarte
- Bomba COVEC-F 2Documento120 páginasBomba COVEC-F 2William Giovanni Madariaga Malebrán100% (5)
- Actividad 1. - Actuadores Hidraulicos y NeumaticosDocumento23 páginasActividad 1. - Actuadores Hidraulicos y NeumaticosAdan Espinoza100% (1)
- Historia de La RoboticaDocumento14 páginasHistoria de La RoboticaSergio BoccheciampeAún no hay calificaciones
- 1.1 Grados de LibertadDocumento13 páginas1.1 Grados de LibertaddanteAún no hay calificaciones
- Mecanismos U1 Parte 1 1Documento52 páginasMecanismos U1 Parte 1 1Fernando HernandezAún no hay calificaciones
- Tren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadDe EverandTren Flotante: Allanando el camino hacia los futuros trenes de alta velocidadAún no hay calificaciones
- PETS-MAN-203 Mantenimiento de Chancadora Cónica V11Documento4 páginasPETS-MAN-203 Mantenimiento de Chancadora Cónica V11seguridad tecnominAún no hay calificaciones
- Circuitos CombinacionalesDocumento9 páginasCircuitos CombinacionalesMartin Ruiz SarmientoAún no hay calificaciones
- Modelos Matemáticos de Sistemas FísicosDocumento11 páginasModelos Matemáticos de Sistemas FísicosGomer Guevara TitoAún no hay calificaciones
- Unidad V Sistemas Lineales e Invariantes en El Tiempo Discreto LtiDocumento21 páginasUnidad V Sistemas Lineales e Invariantes en El Tiempo Discreto Ltiadrian castroAún no hay calificaciones
- Control de Sistemas Mecánicos Subactuados PDFDocumento8 páginasControl de Sistemas Mecánicos Subactuados PDFIng Emisael AlarcónAún no hay calificaciones
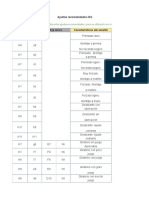
- Tabla Sencilla de AjustesDocumento4 páginasTabla Sencilla de AjustesEdortaMorenoAranburuAún no hay calificaciones
- Graficas de MasonDocumento8 páginasGraficas de MasonJulio ValverdeAún no hay calificaciones
- Sesión 2 - Modelo MatemáticoDocumento27 páginasSesión 2 - Modelo MatemáticoErick JavesAún no hay calificaciones
- Tema 2 Modelado Matemático de Sistemas FísicosDocumento24 páginasTema 2 Modelado Matemático de Sistemas FísicosMiguelAún no hay calificaciones
- 1.1 Modelación de Sistemas Físicos 2015-1Documento44 páginas1.1 Modelación de Sistemas Físicos 2015-1David Sarmiento CordovaAún no hay calificaciones
- Función de Transferencia de Un Motor de CDDocumento8 páginasFunción de Transferencia de Un Motor de CDAbel Nohpal BrionesAún no hay calificaciones
- Modelos Matemáticos de Sistemas FísicosDocumento50 páginasModelos Matemáticos de Sistemas FísicosAndrés Alvarado NavaAún no hay calificaciones
- Vibraciones Libre en Sistemas de Un Grado de LibertadDocumento21 páginasVibraciones Libre en Sistemas de Un Grado de LibertadJairoAún no hay calificaciones
- Dinamica de Sistemas IDocumento17 páginasDinamica de Sistemas ICarlos Pérez HernándezAún no hay calificaciones
- Matrices de Transformación HomogéneaDocumento5 páginasMatrices de Transformación HomogéneaadolfoclesAún no hay calificaciones
- Dinamica de Un Cuerpo RigidoDocumento47 páginasDinamica de Un Cuerpo RigidoMauricio Salinas Beltran100% (1)
- Euler LagrangeDocumento12 páginasEuler LagrangeDARIO DELGADO PORTILLOAún no hay calificaciones
- Modeladoy SimulacionDocumento36 páginasModeladoy Simulacionanblor71Aún no hay calificaciones
- APuntes COntrolDocumento85 páginasAPuntes COntrolKunal Girish TewaniAún no hay calificaciones
- Teclado Matricial 4x4 Con El PIC16F877ADocumento4 páginasTeclado Matricial 4x4 Con El PIC16F877AELPICHUEAún no hay calificaciones
- Matrices de Transformacion HomogeneaDocumento13 páginasMatrices de Transformacion HomogeneaAbdel CaballeroAún no hay calificaciones
- Analisis en Estado EstableDocumento30 páginasAnalisis en Estado EstableEsmeralda Alvines FernandezAún no hay calificaciones
- Presentacion de Cinematica de MaquinasDocumento32 páginasPresentacion de Cinematica de MaquinasJoel FloresAún no hay calificaciones
- Vibraciones Mecánicas - Escuela de Ingeniería Mecánica ULADocumento4 páginasVibraciones Mecánicas - Escuela de Ingeniería Mecánica ULAJavier Antonio Cardenas OliverosAún no hay calificaciones
- Unidad 2 Fundamentos de RoboticaDocumento18 páginasUnidad 2 Fundamentos de RoboticaCaricia Vazquez LagosAún no hay calificaciones
- Modelo Matematico PDFDocumento78 páginasModelo Matematico PDFJuan LaguerriAún no hay calificaciones
- Maquinas de Corriente DirectaDocumento3 páginasMaquinas de Corriente DirectaCarlos GironAún no hay calificaciones
- Motor A Pasos Con MicrocontroladorDocumento9 páginasMotor A Pasos Con MicrocontroladorBetancourt LRAún no hay calificaciones
- Informe SemaforoDocumento9 páginasInforme SemaforoWil Fabi LaguatasigAún no hay calificaciones
- Mecanica para La Automatizacion Saber I Unidad I PDFDocumento24 páginasMecanica para La Automatizacion Saber I Unidad I PDFChristian peñaAún no hay calificaciones
- FasorDocumento4 páginasFasorSaray PetaqueroAún no hay calificaciones
- Modelado y Dinamica de Sistemas Fisicos LinealesDocumento108 páginasModelado y Dinamica de Sistemas Fisicos LinealesReech Dirt EpAún no hay calificaciones
- Micro Portafolio Tema 5Documento19 páginasMicro Portafolio Tema 5Aurea CastellanosAún no hay calificaciones
- Laboratorio 1 Vibraciones y OndasDocumento5 páginasLaboratorio 1 Vibraciones y OndasJota Gomez Cdlm100% (1)
- Teclado Matricial 4x4 Con El PIC16F877ADocumento4 páginasTeclado Matricial 4x4 Con El PIC16F877AKarlita M.Aún no hay calificaciones
- Motores SincronicosDocumento9 páginasMotores SincronicosFelix XlejoAún no hay calificaciones
- Reporte Contador 7 SegmentosDocumento14 páginasReporte Contador 7 SegmentosSergio Medina MartinezAún no hay calificaciones
- Vibraciones MecanicasDocumento21 páginasVibraciones Mecanicasnelson moralesAún no hay calificaciones
- Modelo, Pendulo InvertidoDocumento9 páginasModelo, Pendulo InvertidoJose VillamizarAún no hay calificaciones
- Apuntes Dinamica de SistemasDocumento25 páginasApuntes Dinamica de SistemasAurea Castellanos BlackAún no hay calificaciones
- Respuesta en El TiempoDocumento2 páginasRespuesta en El TiempoVictor J. OreAún no hay calificaciones
- Tarea 5.4Documento7 páginasTarea 5.4FernandoLopez100% (1)
- UnicicloDocumento7 páginasUnicicloMichelle FosterAún no hay calificaciones
- Logica SecuencialDocumento23 páginasLogica SecuencialBryan Jaramillo100% (1)
- Aplicacion de Los Convertidores CCDocumento3 páginasAplicacion de Los Convertidores CCMiguelAún no hay calificaciones
- Introducción A La Modelación de Sistemas ExpoDocumento28 páginasIntroducción A La Modelación de Sistemas ExpoMarioAún no hay calificaciones
- LevasDocumento40 páginasLevasDaniel HernandezAún no hay calificaciones
- Teclado Matricial Con PicDocumento9 páginasTeclado Matricial Con PicAlexAún no hay calificaciones
- 4.2 FlybackDocumento54 páginas4.2 FlybackjoseAún no hay calificaciones
- Analisis Topologico de MecanismosDocumento8 páginasAnalisis Topologico de MecanismosAna GPAún no hay calificaciones
- Historia Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.Documento11 páginasHistoria Del Control de Clásico A Moderno, Concepto de Control y Diferencias Entre Control y Automatización.LogicTutosAún no hay calificaciones
- Análisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoDocumento4 páginasAnálisis y Simulación en La Frecuencia de Sistemas Lineales Invariantes en El TiempoLuilli Angel EsquincaAún no hay calificaciones
- Sistemas de Control de 1er 2do y Orden SuperiorDocumento13 páginasSistemas de Control de 1er 2do y Orden SuperiorKaren AlvarezAún no hay calificaciones
- Diseño y Selección de Elementos Mecánicos PDFDocumento1 páginaDiseño y Selección de Elementos Mecánicos PDFobedcaAún no hay calificaciones
- Simplificación de Funciones BooleanasDocumento11 páginasSimplificación de Funciones BooleanasJesús Juan Briceño AnicamaAún no hay calificaciones
- Capitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Documento35 páginasCapitulo 4 Modelos Matematicos de Sistemas Fisicos (Comprimido)Raul GonzalesAún no hay calificaciones
- Modelos Matemáticos de SistemasDocumento13 páginasModelos Matemáticos de SistemasBrandon TpAún no hay calificaciones
- Capitulo 5 Analisis de Sistemas de Control en El Dominio Del TiempoDocumento56 páginasCapitulo 5 Analisis de Sistemas de Control en El Dominio Del TiempoJuan ApazaAún no hay calificaciones
- Capitulo 3 La Funcion de Transferencia (Comprimido)Documento27 páginasCapitulo 3 La Funcion de Transferencia (Comprimido)Juan ApazaAún no hay calificaciones
- Capitulo 2 Fundamentos MatematicosDocumento34 páginasCapitulo 2 Fundamentos MatematicosJuan ApazaAún no hay calificaciones
- Capitulo 2 Fundamentos MatematicosDocumento34 páginasCapitulo 2 Fundamentos MatematicosJuan ApazaAún no hay calificaciones
- Sistema de ControlDocumento11 páginasSistema de Controlalexis enrique castro ochoaAún no hay calificaciones
- Guía Normas APA Séptima 7. Edición 2020Documento64 páginasGuía Normas APA Séptima 7. Edición 2020Junior Ernesto López TasaycoAún no hay calificaciones
- Ccompleto Puentes....Documento12 páginasCcompleto Puentes....Franz Llanos AtencioAún no hay calificaciones
- 6a Proce, Equipos D Laminación 2020Documento90 páginas6a Proce, Equipos D Laminación 2020luisAún no hay calificaciones
- Secado y PROCTORDocumento5 páginasSecado y PROCTORTexy Gacitúa ToroAún no hay calificaciones
- Taller de Planeacion ParcialDocumento3 páginasTaller de Planeacion ParcialFabian DuranAún no hay calificaciones
- Pauta Mantenimiento mg3Documento4 páginasPauta Mantenimiento mg3Adolfo FuentealbaAún no hay calificaciones
- Ata 36 A310Documento14 páginasAta 36 A310Diego HerreraAún no hay calificaciones
- Plantilla para EncabezadoDocumento1 páginaPlantilla para EncabezadoSamantha Villa OtavaloAún no hay calificaciones
- Practica #9 - Caida LibreDocumento8 páginasPractica #9 - Caida LibrearrepentidodenadaAún no hay calificaciones
- Equipos de Sorcion y BurbujeoDocumento12 páginasEquipos de Sorcion y BurbujeoborysAún no hay calificaciones
- Aplicaciones Ventajas y DesventajasDocumento3 páginasAplicaciones Ventajas y DesventajasGeorge SpartanAún no hay calificaciones
- Reporte Equipos de RefrigeracionDocumento4 páginasReporte Equipos de RefrigeracionMaricela PerezAún no hay calificaciones
- Equipos de PresiónDocumento49 páginasEquipos de PresiónstivenAún no hay calificaciones
- Toolhub 2021Documento214 páginasToolhub 2021Distribuciones PMSAún no hay calificaciones
- Tema 52Documento24 páginasTema 52José DanielAún no hay calificaciones
- 1 Ecuacion Virial Puro SEGUNDO VDocumento28 páginas1 Ecuacion Virial Puro SEGUNDO VDiegAún no hay calificaciones
- 3.1 Empuje de TierrasDocumento26 páginas3.1 Empuje de TierrasSharonAún no hay calificaciones
- Diseño, Construcción y Montaje de Transportadores y TolvasDocumento4 páginasDiseño, Construcción y Montaje de Transportadores y Tolvasedgar7venAún no hay calificaciones
- Analisis de Fallas-1Documento37 páginasAnalisis de Fallas-1mecatronica utmAún no hay calificaciones
- 7896 Mecanica de MaterialesDocumento3 páginas7896 Mecanica de MaterialesMaryoris MelgarAún no hay calificaciones
- Benavides Gabriel Tarea 5Documento6 páginasBenavides Gabriel Tarea 5Gabriel BenavidesAún no hay calificaciones
- 011 Formato Lista de Chequeo para Equipos de Soldadura y OxicorteDocumento2 páginas011 Formato Lista de Chequeo para Equipos de Soldadura y Oxicortesergio navarrete moraAún no hay calificaciones
- Proyecto 5Documento49 páginasProyecto 5rosendo reyes rojasAún no hay calificaciones
- Prueba Piloto 1Documento2 páginasPrueba Piloto 1Jose VillamilAún no hay calificaciones
- VOLQUETADocumento20 páginasVOLQUETAKevin Sánchez VeintimillaAún no hay calificaciones
- Habitos de ConduccionDocumento6 páginasHabitos de ConduccionCarlos Andres Torres LeonAún no hay calificaciones
- Inv. Motor Universal..Documento11 páginasInv. Motor Universal..Sebastian AlvaradoAún no hay calificaciones