También podría gustarte
- 1 Tipos de ArquitecturasDocumento9 páginas1 Tipos de ArquitecturasKenia CruzAún no hay calificaciones
- Analisis de Componentes CpuDocumento16 páginasAnalisis de Componentes CpuJesús Melchor Hau NohAún no hay calificaciones
- Reporte Equipo 9Documento40 páginasReporte Equipo 9Amairani Sarai Jimenez ArroyoAún no hay calificaciones
- BusesDocumento18 páginasBusesAnabelJulianaVarhenVilelaAún no hay calificaciones
- Unidad 3 Seleccion de Componentes para Ensamble de Equipos de ComputoDocumento28 páginasUnidad 3 Seleccion de Componentes para Ensamble de Equipos de ComputoSergioJairMeridaCortesAún no hay calificaciones
- Tipos de Computación ParalelaDocumento36 páginasTipos de Computación Paralelamorris star50% (2)
- Cuadro Comparativo de SGBDDocumento7 páginasCuadro Comparativo de SGBDOscarAún no hay calificaciones
- Administracion de Dispositivos de Entrada y SalidaDocumento29 páginasAdministracion de Dispositivos de Entrada y SalidaJean Barreto RojasAún no hay calificaciones
- Unidad 3 Seleccion de Componentes para Ensamble de Equipo de ComputoDocumento20 páginasUnidad 3 Seleccion de Componentes para Ensamble de Equipo de Computoartemio hernandez gallegosAún no hay calificaciones
- Unidad 2 MemoriasDocumento5 páginasUnidad 2 MemoriasJosue Misael Haas BacabAún no hay calificaciones
- Redes de ComputadorasDocumento57 páginasRedes de ComputadorasDaniela Garcia JimenezAún no hay calificaciones
- Unidad 1 Características y Operación de Puertos EstándarDocumento42 páginasUnidad 1 Características y Operación de Puertos EstándarelidAún no hay calificaciones
- Unidad 2 PDFDocumento13 páginasUnidad 2 PDFJUAN ANTONIO LOPEZ SANCHEZAún no hay calificaciones
- Las Interrupciones de La Arquitectura de ComputadorasDocumento26 páginasLas Interrupciones de La Arquitectura de Computadorasgtgtggtgtg100% (1)
- Unidad II. Estructura y Funcionamiento de La CPUDocumento35 páginasUnidad II. Estructura y Funcionamiento de La CPUSergioJairMeridaCortes80% (5)
- Origenes Redes de ComputadorasDocumento9 páginasOrigenes Redes de ComputadorasJorge VerdiAún no hay calificaciones
- Arquitectura de ComputadorasDocumento45 páginasArquitectura de ComputadorasJosé Muñoz Ramírez100% (2)
- Unidad 3 Selección de Componentes para Ensamble de ComputoDocumento17 páginasUnidad 3 Selección de Componentes para Ensamble de ComputoLuis Gerardo PerezAún no hay calificaciones
- Sistemas Operativos para Servidores PropietariosDocumento4 páginasSistemas Operativos para Servidores PropietariosJonathan Gonzalez Reyes100% (1)
- ITPUE-AC-PO-005-02 Control de Avance Académico Del Estudiante - TIC1005TA PDFDocumento3 páginasITPUE-AC-PO-005-02 Control de Avance Académico Del Estudiante - TIC1005TA PDFmaria amastal perezAún no hay calificaciones
- VRC, LRC, CRCDocumento11 páginasVRC, LRC, CRCMartinez JavierAún no hay calificaciones
- Procesamiento ParaleloDocumento35 páginasProcesamiento ParaleloJEFFERSON MUÑOZ PARDOAún no hay calificaciones
- Ensayo Microprocesadores - José GonzálezDocumento11 páginasEnsayo Microprocesadores - José GonzálezJosé GonzálezAún no hay calificaciones
- Tipos de ServidoresDocumento15 páginasTipos de ServidoresEner PostAún no hay calificaciones
- 4.1. Dispositivos y Manejadores de Dispositivos Device Drivers.Documento2 páginas4.1. Dispositivos y Manejadores de Dispositivos Device Drivers.siulosvi14100% (1)
- 1.1 Revisión de Especificación de Requisitos.Documento19 páginas1.1 Revisión de Especificación de Requisitos.EstefannyMar83% (6)
- Selección de Componentes para Un Ensamble de EquipoDocumento20 páginasSelección de Componentes para Un Ensamble de EquipoJoan CasillasAún no hay calificaciones
- Mapas Unidad 2Documento30 páginasMapas Unidad 2Yessica SauzaAún no hay calificaciones
- Conmutación y Enrutamiento de Datos. Unidad 1Documento29 páginasConmutación y Enrutamiento de Datos. Unidad 1Leticia MendozaAún no hay calificaciones
- Base de Datos ConnollyDocumento86 páginasBase de Datos ConnollyAchenryy Arias CondorAún no hay calificaciones
- Sintaxis y Semántica de Un Sistema de ProducciónDocumento8 páginasSintaxis y Semántica de Un Sistema de Producción'Laura FigueroaAún no hay calificaciones
- Arquitectura Von Neumann y HarvardDocumento7 páginasArquitectura Von Neumann y HarvardBrian JaramilloAún no hay calificaciones
- 2.6 Técnicas de Administración Del PlanificadorDocumento10 páginas2.6 Técnicas de Administración Del PlanificadorjhiecooAún no hay calificaciones
- CuestionarioDocumento7 páginasCuestionarioRicardo de la Parra100% (1)
- UNIDAD 1 - Bloques FuncionalesDocumento12 páginasUNIDAD 1 - Bloques FuncionalesJulio Castillo50% (2)
- Consistencia y ReplicaciónDocumento11 páginasConsistencia y ReplicaciónMarian LunaAún no hay calificaciones
- 4.3 Sistemas de Memoria Compartida: MultiprocesadoresDocumento13 páginas4.3 Sistemas de Memoria Compartida: MultiprocesadoresLiviJhacer RuizAún no hay calificaciones
- Redes Informáticas LANDocumento9 páginasRedes Informáticas LANhernan001Aún no hay calificaciones
- Cuadro Comparativo de Servidores WebDocumento2 páginasCuadro Comparativo de Servidores WebHugo Lecona IdiaquezAún no hay calificaciones
- Fundamentos de Base de Datos - Unidad 1 y 2Documento59 páginasFundamentos de Base de Datos - Unidad 1 y 2Francisco Zenteno100% (1)
- Ensayo Memorias RamDocumento3 páginasEnsayo Memorias RamRolando Paez MunarAún no hay calificaciones
- Administración de MemoriaDocumento43 páginasAdministración de MemoriaLopez OlgaAún no hay calificaciones
- 1.1 Modelos de Arquitectura de ComputoDocumento36 páginas1.1 Modelos de Arquitectura de ComputoToño SalinasAún no hay calificaciones
- Unidad I. - Funciones de La Administración de RedesDocumento4 páginasUnidad I. - Funciones de La Administración de RedesJorge Arturo Arellano del Aguila100% (1)
- Modelos de Madurez Del ProcesoDocumento2 páginasModelos de Madurez Del ProcesoAldo CorroAún no hay calificaciones
- Adsi Aa 3.1 IagDocumento6 páginasAdsi Aa 3.1 Iaganon_278407064Aún no hay calificaciones
- Dispositivos de Entradas y SalidasDocumento11 páginasDispositivos de Entradas y SalidasElias Chipin Caicedo100% (1)
- Introducción A Las Tecnologías de MóvilesDocumento24 páginasIntroducción A Las Tecnologías de MóvilesAnaYunuenHinojosa100% (1)
- COMUNICACIÓN INTERNA DE LA COMPUTADORA - (Bernachea Monago Italo) PDFDocumento2 páginasCOMUNICACIÓN INTERNA DE LA COMPUTADORA - (Bernachea Monago Italo) PDFItalo Bernachea MonagoAún no hay calificaciones
- Unidad II - La Unidad Central Del Proceso.Documento8 páginasUnidad II - La Unidad Central Del Proceso.Marielis FlorentinoAún no hay calificaciones
- Reporte de InstalacionDocumento23 páginasReporte de InstalacionLUISAún no hay calificaciones
- Unidad 3 Seleccion de Componentes para Ensamble de Equipos de ComputoDocumento12 páginasUnidad 3 Seleccion de Componentes para Ensamble de Equipos de ComputoSandara ParkAún no hay calificaciones
- Tecnologia e Interfaces de ComputadorasDocumento13 páginasTecnologia e Interfaces de ComputadorasCarlos Uchiha FernándezAún no hay calificaciones
- Trabajo Tema3Documento25 páginasTrabajo Tema3Usiel PerezAún no hay calificaciones
- Problemas Mc3a1s Comunes para El Manejo de Los Dispositivos de EntradaDocumento5 páginasProblemas Mc3a1s Comunes para El Manejo de Los Dispositivos de EntradaaldrinpulidomtzAún no hay calificaciones
- U3, Buses y Puertos EstándarDocumento18 páginasU3, Buses y Puertos EstándarRaúl Monforte Chulin50% (2)
- 1.2.2 MemoriaDocumento9 páginas1.2.2 MemoriaKyrɑh Gtz Herrerɑ de Ōtsukɑ100% (1)
- Seleccion de Componentes para Ensamble de Equipos de ComputoDocumento41 páginasSeleccion de Componentes para Ensamble de Equipos de Computoeduardoazuara67% (3)
- Arquitectura de ComputadorasDocumento47 páginasArquitectura de ComputadorasRigoberto He HeAún no hay calificaciones
- Modelos de Arquitecturas de ComputadorasDocumento7 páginasModelos de Arquitecturas de ComputadorasAmsydarkJadeAún no hay calificaciones
- Guia 5Documento7 páginasGuia 5Joaquin Bou MartiAún no hay calificaciones
- Arreglos en COBOL - Ejemplo de Uso de OCCURSDocumento4 páginasArreglos en COBOL - Ejemplo de Uso de OCCURSMauricio Ponce GomezAún no hay calificaciones
- Casos de Factoreo-EjerciciosDocumento9 páginasCasos de Factoreo-EjerciciosLuciana Martinez Nadia OliveraAún no hay calificaciones
- Lengua 1º PrimariaDocumento10 páginasLengua 1º PrimariaAlberto Grande PachecoAún no hay calificaciones
- Sesion Pronombres Personales-Comunicacion06-06Documento2 páginasSesion Pronombres Personales-Comunicacion06-06Luis Pablo Vilcachagua Ferrer80% (5)
- Reporte Robot de Tareas - Final.1Documento42 páginasReporte Robot de Tareas - Final.1Angel PardenillaAún no hay calificaciones
- Métodos de IntegraciónDocumento34 páginasMétodos de Integraciónkeilin perezAún no hay calificaciones
- ORANDO - Tema II - Salmo 100 - PastoreoDocumento17 páginasORANDO - Tema II - Salmo 100 - PastoreoAdalid Garcia RodriguezAún no hay calificaciones
- Tema 7 Oposiciones PrimariaDocumento13 páginasTema 7 Oposiciones PrimariaSara González Magdalena100% (4)
- Literatura LatinaDocumento12 páginasLiteratura LatinaYeiny SanabriaAún no hay calificaciones
- Caravedo y Rivarola - El Español Andino, Variedad Real o MentalDocumento39 páginasCaravedo y Rivarola - El Español Andino, Variedad Real o MentalRodrigo R JordanAún no hay calificaciones
- Bases 11 de Noviembre Divino Corazón de Jesús-1Documento7 páginasBases 11 de Noviembre Divino Corazón de Jesús-1Jordan laucoAún no hay calificaciones
- Unidad 10Documento5 páginasUnidad 10Agustín GiménezAún no hay calificaciones
- Comezon de OirDocumento4 páginasComezon de OirJosue Angarita GarciaAún no hay calificaciones
- Funciones de Excel - EstadísticasDocumento46 páginasFunciones de Excel - EstadísticasFabio CaldasAún no hay calificaciones
- Act02 Ejercicios Sistemas de Ecuaciones LinealesDocumento4 páginasAct02 Ejercicios Sistemas de Ecuaciones LinealesThe Dark NekoAún no hay calificaciones
- Prueba Ingo y DragoDocumento4 páginasPrueba Ingo y DragoMarianela AlejandraAún no hay calificaciones
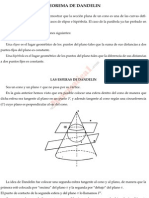
- Teorema de DandelinDocumento6 páginasTeorema de DandelinAMYNNXXXXAún no hay calificaciones
- Anuario 28Documento316 páginasAnuario 28Ariela Erica SchnirmajerAún no hay calificaciones
- Rúbrica para Evaluar Revista DigitalDocumento3 páginasRúbrica para Evaluar Revista DigitalMaria Fernanda Garcia FloresAún no hay calificaciones
- El Hombre, El Niño y El Burro - A Man, A Boy and A DonkeyDocumento7 páginasEl Hombre, El Niño y El Burro - A Man, A Boy and A DonkeyfreekidstoriesAún no hay calificaciones
- Amanecer Ed La TempestadDocumento42 páginasAmanecer Ed La TempestadingpablomirandaAún no hay calificaciones
- Prueba de Unidad III 2° BásicoDocumento3 páginasPrueba de Unidad III 2° BásicoIvan Roemurallas DewarenAún no hay calificaciones
- Ace-R ChileDocumento10 páginasAce-R ChileCamila VergaraAún no hay calificaciones
- Belleza y Mistica Aprobacion FinalDocumento167 páginasBelleza y Mistica Aprobacion FinalAlejandro Arcila JiménezAún no hay calificaciones
- Trastornos PsicolinguisticosDocumento13 páginasTrastornos PsicolinguisticosElvira Pujol100% (1)
- ACTIVIDAD 3.1. Pruebas de TraducciónDocumento5 páginasACTIVIDAD 3.1. Pruebas de TraducciónBeatriz AparicioAún no hay calificaciones
- Epocas LiterariasDocumento15 páginasEpocas LiterariasLisbeth Osio0% (1)
- Primera Tarea de Informatica UapaDocumento14 páginasPrimera Tarea de Informatica UapaPavel Martinez100% (1)
- Santo TomásDocumento31 páginasSanto Tomásalbiii.mst28Aún no hay calificaciones