También podría gustarte
- VPN PDFDocumento20 páginasVPN PDFLau MontesAún no hay calificaciones
- Tipos de BrocasDocumento7 páginasTipos de BrocasJesus Andrés Monge LoorAún no hay calificaciones
- Capitulo Vii CentralizadoresDocumento35 páginasCapitulo Vii CentralizadoresIsaBela IP50% (2)
- Calculo de Angulo de TaludDocumento19 páginasCalculo de Angulo de TaludPool Junior Campos AcuñaAún no hay calificaciones
- Proyecto Modelo MatematicoDocumento60 páginasProyecto Modelo MatematicoEva OrtegaAún no hay calificaciones
- Tecnica Patinaje Velocidad PDFDocumento7 páginasTecnica Patinaje Velocidad PDFCarlos Mario Mestra GarayAún no hay calificaciones
- Corrosión en Metales No FerrososDocumento2 páginasCorrosión en Metales No FerrososBrYan CabreraAún no hay calificaciones
- Sistema de Alimentación de CombustibleDocumento2 páginasSistema de Alimentación de CombustiblenickAún no hay calificaciones
- 4 Sarta de Perforación (Tubería)Documento10 páginas4 Sarta de Perforación (Tubería)Agatha095Aún no hay calificaciones
- Bombeo MecanicoDocumento27 páginasBombeo MecanicoThania CaballeroAún no hay calificaciones
- Modelos de Pozos HorizontalesDocumento1 páginaModelos de Pozos HorizontalesRonald BorborAún no hay calificaciones
- Presión de Poros PDFDocumento23 páginasPresión de Poros PDFYari Diaz LicuimeAún no hay calificaciones
- Puerto de Santa RosaDocumento86 páginasPuerto de Santa RosaRhoteram VikkuAún no hay calificaciones
- Metodo de RwaDocumento2 páginasMetodo de RwaPaola ChanalathAún no hay calificaciones
- Sistema de RotacionDocumento19 páginasSistema de RotacionVictor RodriguezAún no hay calificaciones
- Ensayo PetroleoDocumento2 páginasEnsayo PetroleoDavid Andres Rodriguez Carrasquilla100% (2)
- Ejercicio de Resistividad de Agua Petrofisica IDocumento5 páginasEjercicio de Resistividad de Agua Petrofisica IkristianricardoAún no hay calificaciones
- Historia de La Evolución de WindowsDocumento9 páginasHistoria de La Evolución de WindowschuyAún no hay calificaciones
- TIPOS DE TERMINACION MonografiaDocumento11 páginasTIPOS DE TERMINACION MonografiaFabiola Fabisita PacoAún no hay calificaciones
- Sistema de RotacionDocumento11 páginasSistema de Rotacionlorena hernandez aguilarAún no hay calificaciones
- Acarreo de Ripios para Garantizar La Limpieza Del HoyoDocumento2 páginasAcarreo de Ripios para Garantizar La Limpieza Del HoyoRuben Waldir Segarra MoralesAún no hay calificaciones
- Correlaciones Visosidad Volumen y Densidad Del AguaDocumento2 páginasCorrelaciones Visosidad Volumen y Densidad Del AguaArnold VargasAún no hay calificaciones
- Sistemas Superficiales de ControlDocumento31 páginasSistemas Superficiales de ControlJael Castellanos Morales100% (1)
- Ejercicios ModelosDocumento5 páginasEjercicios ModelosRenzo Bermudez BacilioAún no hay calificaciones
- Terminacion InteligenteDocumento3 páginasTerminacion InteligenteJuan Pablo EstikleAún no hay calificaciones
- Lodos de Alto RendimientoDocumento5 páginasLodos de Alto RendimientoJorge VeltranAún no hay calificaciones
- Tuberias de Un Pozo PetroleroDocumento9 páginasTuberias de Un Pozo PetroleroLiliana Serrano100% (1)
- Curso de Control de Pozo Iadc Wellsharp - Nivel IntroductorioDocumento5 páginasCurso de Control de Pozo Iadc Wellsharp - Nivel IntroductorioNeme VasquesAún no hay calificaciones
- OLEODUCTOSDocumento23 páginasOLEODUCTOSJavier Castro100% (1)
- Inyeccion Continua de VaporDocumento6 páginasInyeccion Continua de Vaporisabel del valleAún no hay calificaciones
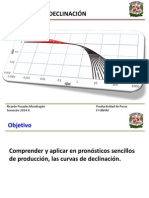
- Curvas de DeclinaciónDocumento26 páginasCurvas de DeclinaciónEmmanuel SandovalAún no hay calificaciones
- Petrofisica y Registro de PozosDocumento4 páginasPetrofisica y Registro de PozosAnonymous Gssg1ePaSAún no hay calificaciones
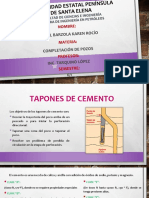
- Tapones de CementacionDocumento8 páginasTapones de CementacionAnna Cintia LopezAún no hay calificaciones
- UNIDAD IV FLUJO DE FLUIDOS EN MEDIOS POROSOS - En.esDocumento66 páginasUNIDAD IV FLUJO DE FLUIDOS EN MEDIOS POROSOS - En.esAnita blanco ArauzAún no hay calificaciones
- PunzadoDocumento15 páginasPunzadoEze GallardoAún no hay calificaciones
- Resumen de Explosivo y Fertilizantes 1.0Documento7 páginasResumen de Explosivo y Fertilizantes 1.0Alejandra Alarcon SuarezAún no hay calificaciones
- Completacion de PozosDocumento15 páginasCompletacion de PozosJunior MorilloAún no hay calificaciones
- Analisis de Los Perfiles de PresiónDocumento10 páginasAnalisis de Los Perfiles de PresiónjesusAún no hay calificaciones
- Planteamiento Del ProblemaDocumento2 páginasPlanteamiento Del ProblemaEnola PMAún no hay calificaciones
- Descripcion Del Simulador BoastDocumento3 páginasDescripcion Del Simulador Boastwalter alonsoAún no hay calificaciones
- Presentacion de Equipos de PerforacionDocumento31 páginasPresentacion de Equipos de PerforacionsoylamasbellaAún no hay calificaciones
- Aseguramiento IntegridadDocumento13 páginasAseguramiento IntegridadjoercazAún no hay calificaciones
- Cuestionario de Reservorio3Documento9 páginasCuestionario de Reservorio3Tiff Ayarde100% (1)
- Bombeo ElectrocentrífugoDocumento14 páginasBombeo ElectrocentrífugoRitchie Daniel100% (1)
- Dispositivo de Contro de FlujoDocumento33 páginasDispositivo de Contro de FlujoLui Escorza100% (1)
- Ait Acl 2009Documento46 páginasAit Acl 2009disponible23Aún no hay calificaciones
- Aguas ProfundasDocumento81 páginasAguas ProfundasDann1995Aún no hay calificaciones
- Unidad 4 y Unidad 5Documento17 páginasUnidad 4 y Unidad 5Gabo HoppusAún no hay calificaciones
- Tesis Control de Pozos en Aguas ProfundasDocumento195 páginasTesis Control de Pozos en Aguas ProfundasAna LucasAún no hay calificaciones
- Metodología de Los Sondeos Eléctricos VerticalesDocumento3 páginasMetodología de Los Sondeos Eléctricos VerticalesAreli Cruz GuzmanAún no hay calificaciones
- Formulas and Calculations For Drilling PDocumento171 páginasFormulas and Calculations For Drilling PNadia Sandoval NeiraAún no hay calificaciones
- Samaria 825 (RMA 1)Documento19 páginasSamaria 825 (RMA 1)Carlos RodriguezAún no hay calificaciones
- Mecanismos de ProduccionDocumento14 páginasMecanismos de ProduccionRoxana VelascoAún no hay calificaciones
- Antecedentes de Los Fluidos en La Industria PetroleraDocumento10 páginasAntecedentes de Los Fluidos en La Industria PetroleraJose David Lopez MendezAún no hay calificaciones
- Sistemas Artificiales de ProducciónDocumento16 páginasSistemas Artificiales de ProducciónMiguel Angel Gomez PalmaAún no hay calificaciones
- Calculo de SurveysDocumento4 páginasCalculo de SurveysAnabel AlexandraAún no hay calificaciones
- Universidad Estatal Península de Santa ElenaDocumento11 páginasUniversidad Estatal Península de Santa ElenaJoel Abel Pin EspinalAún no hay calificaciones
- Deflexion de CurvasDocumento24 páginasDeflexion de CurvasJorge Gutierrez PauroAún no hay calificaciones
- G02. Geodesia Geometrica - Determinación de Coordenadas - Rev - BDocumento19 páginasG02. Geodesia Geometrica - Determinación de Coordenadas - Rev - Bjaviera cáceres barrosAún no hay calificaciones
- Replanteo de Curvas-TopografiaDocumento12 páginasReplanteo de Curvas-Topografiadeyvis100% (1)
- Calculo de SurveysDocumento8 páginasCalculo de SurveysEddie TandazoAún no hay calificaciones
- Ideas de Proyectos 1 Dolar y Quien Va DirigidoDocumento2 páginasIdeas de Proyectos 1 Dolar y Quien Va DirigidoPayito IzaAún no hay calificaciones
- Consulta N Plot PlanDocumento2 páginasConsulta N Plot PlanPayito IzaAún no hay calificaciones
- Informe Abstract Nº22Documento8 páginasInforme Abstract Nº22Payito IzaAún no hay calificaciones
- 11trabajjo GrupoDocumento580 páginas11trabajjo GrupoPayito IzaAún no hay calificaciones
- ISO 14000 ListoDocumento16 páginasISO 14000 ListoPayito IzaAún no hay calificaciones
- Informe Abstract Nº19Documento10 páginasInforme Abstract Nº19Payito IzaAún no hay calificaciones
- Informe Abstract Nº21Documento5 páginasInforme Abstract Nº21Payito IzaAún no hay calificaciones
- Ejemplo de Presupuesto para Una FiestaDocumento1 páginaEjemplo de Presupuesto para Una FiestaPayito Iza100% (2)
- Perfo1 Iza Paola Mapa MentalDocumento11 páginasPerfo1 Iza Paola Mapa MentalPayito IzaAún no hay calificaciones
- Perfo1-Iza Paola-Mapa MentalDocumento11 páginasPerfo1-Iza Paola-Mapa MentalPayito IzaAún no hay calificaciones
- Clasificacion Del TaladroDocumento2 páginasClasificacion Del TaladroPayito IzaAún no hay calificaciones
- 4 TrigonometriaDocumento9 páginas4 TrigonometriaAvendanoVirginiaAún no hay calificaciones
- Calculo LibroDocumento60 páginasCalculo LibroSalma MarsadAún no hay calificaciones
- Las Matemáticas en El Siglo XixDocumento43 páginasLas Matemáticas en El Siglo Xixlucas paez100% (1)
- Torres - Olán - Alejandro - Asignación 2 - 26 Problemas.Documento34 páginasTorres - Olán - Alejandro - Asignación 2 - 26 Problemas.Alejandro Torres OlanAún no hay calificaciones
- PA02 Caminos 1 Parcial 202220-ADocumento5 páginasPA02 Caminos 1 Parcial 202220-Aventa examenesAún no hay calificaciones
- Ejercicio FormularioDocumento15 páginasEjercicio FormulariocompumacluisAún no hay calificaciones
- Taller Trigonometra PDFDocumento4 páginasTaller Trigonometra PDFSalin Avellaneda100% (1)
- Taller Di Figuras Irregurares para VirtualDocumento4 páginasTaller Di Figuras Irregurares para Virtualh layonAún no hay calificaciones
- Gemetria y Trigonometria EjerciciosDocumento32 páginasGemetria y Trigonometria Ejercicioskemquef100% (2)
- Solucion Sector CircularDocumento8 páginasSolucion Sector CircularNitram Ocin100% (3)
- Nivel I Trigo PDFDocumento2 páginasNivel I Trigo PDFAldair Bravo YarlequeAún no hay calificaciones
- Informe 3 Pendulo Fisico Periodo Física II UNA - 230829 - 082512Documento17 páginasInforme 3 Pendulo Fisico Periodo Física II UNA - 230829 - 082512Carlos SpAún no hay calificaciones
- Actualización Operador de U.tub Flex.Documento158 páginasActualización Operador de U.tub Flex.Luis David Martinez JiménezAún no hay calificaciones
- Introducción y Teoría de Errores-MN FISI-UNMSM 2018-IIDocumento67 páginasIntroducción y Teoría de Errores-MN FISI-UNMSM 2018-IIAE M EduAún no hay calificaciones
- Matematica FinesDocumento100 páginasMatematica FinesBrenda Herrera100% (1)
- Las Aventuras Matemáticas de Daniel-RespesutasDocumento13 páginasLas Aventuras Matemáticas de Daniel-RespesutasGustavo RamirezAún no hay calificaciones
- Practicas de Analisis Matricial Aplicado y Ampliacion de Metodos Numericos Con MATLABDocumento63 páginasPracticas de Analisis Matricial Aplicado y Ampliacion de Metodos Numericos Con MATLABReynaldo Wilson Flores LópezAún no hay calificaciones
- Líneas de AducciónDocumento14 páginasLíneas de AducciónCarlos Antonio Ibañez Nacif100% (1)
- Sexto Grado Semana 29Documento15 páginasSexto Grado Semana 29Mago PonChAún no hay calificaciones
- Clase Math de JavaDocumento6 páginasClase Math de JavaAlejandro Quintana CalderónAún no hay calificaciones
- Test de Proceso 8 Circulo y CircunferenciaDocumento4 páginasTest de Proceso 8 Circulo y CircunferenciaLiceo Isabel Poblete VargasAún no hay calificaciones
- RAZONAMIENTO MATEMATICOS TecnicasDocumento4 páginasRAZONAMIENTO MATEMATICOS TecnicasMiguelAún no hay calificaciones
- La Protohistoria - Pedro Guirao PDFDocumento138 páginasLa Protohistoria - Pedro Guirao PDFAdolf Rotschild100% (3)
- EJERCICIOSDocumento2 páginasEJERCICIOSXiomara GamarraAún no hay calificaciones
- Tarea ViiiDocumento9 páginasTarea ViiiHola LeuryAún no hay calificaciones
- s8 2 Sec Solucion Matematica Dia 3 PDFDocumento18 páginass8 2 Sec Solucion Matematica Dia 3 PDFGritt Bermudo RaymondyAún no hay calificaciones
- Informe Determinacion de Pi (Jean Carlos Orozco) (Jean Carlos Orozco)Documento4 páginasInforme Determinacion de Pi (Jean Carlos Orozco) (Jean Carlos Orozco)IsaacAún no hay calificaciones
- EPSA Matematicas1 Filloy 1e DosificacionDocumento8 páginasEPSA Matematicas1 Filloy 1e DosificacionLuis Torres100% (1)
- Avaluo Rural Servidumbre ElectricasDocumento19 páginasAvaluo Rural Servidumbre Electricasjesus david narvaez sarmiento100% (1)