También podría gustarte
- Sesion 3 - Recoleccion de Datos y Casos AplicadosDocumento13 páginasSesion 3 - Recoleccion de Datos y Casos Aplicadoshercam940% (1)
- Sesion 2 - Ejemplos de SimulacionDocumento19 páginasSesion 2 - Ejemplos de Simulacionhercam94Aún no hay calificaciones
- 3 Introduccion A La AutomatizacionDocumento27 páginas3 Introduccion A La Automatizacionhercam94Aún no hay calificaciones
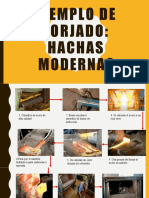
- Ejemplo de ForjadoDocumento3 páginasEjemplo de Forjadohercam94Aún no hay calificaciones
- Clase 2 Modelo de Causalidad de PérdidasDocumento28 páginasClase 2 Modelo de Causalidad de Pérdidashercam94Aún no hay calificaciones
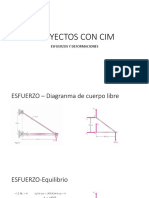
- Pcim EsfuerzosDocumento35 páginasPcim Esfuerzoshercam94Aún no hay calificaciones
- Lab Ejerc 02Documento3 páginasLab Ejerc 02hercam94Aún no hay calificaciones
- Filtrado de AceiteDocumento1 páginaFiltrado de Aceitehercam94Aún no hay calificaciones
- Gestion de InvDocumento16 páginasGestion de Invhercam94Aún no hay calificaciones
- Exposicion TermoquimicaDocumento44 páginasExposicion Termoquimicahercam94Aún no hay calificaciones
- Biografia Steven JobsDocumento2 páginasBiografia Steven JobsAdriana NavarroAún no hay calificaciones
- Dibuje Un Diagrama en El Que Se Muestre Un Banco Formado Por Dos Resistencias Que Este en Serie Como Ejemplo de Su ExplicaciónDocumento2 páginasDibuje Un Diagrama en El Que Se Muestre Un Banco Formado Por Dos Resistencias Que Este en Serie Como Ejemplo de Su ExplicaciónMisael CruzAún no hay calificaciones
- Kölbi Roaming Guía de UsoDocumento10 páginasKölbi Roaming Guía de UsoElena QuesadaAún no hay calificaciones
- El Método de Grabación de Baterías Glyn JohnsDocumento7 páginasEl Método de Grabación de Baterías Glyn Johnsbelvedere01Aún no hay calificaciones
- Algoritmo de KruskalDocumento19 páginasAlgoritmo de KruskalPabloValenciaAún no hay calificaciones
- AA1nGuianaprendizajen2021 3160b553c7df549Documento7 páginasAA1nGuianaprendizajen2021 3160b553c7df549JulioAún no hay calificaciones
- EDEBEDocumento39 páginasEDEBEManuel Cano100% (2)
- Presentación 8Documento10 páginasPresentación 8Angel Rafael Ogando VenturaAún no hay calificaciones
- Investigacion2 SSH SNMP NTPDocumento2 páginasInvestigacion2 SSH SNMP NTPOscar LeónAún no hay calificaciones
- Como Ver El AuraDocumento21 páginasComo Ver El AuraPia Dominguez AlzagaAún no hay calificaciones
- COSTOS-ESTIMADOS-EESS PeruDocumento10 páginasCOSTOS-ESTIMADOS-EESS PerumbenvillAún no hay calificaciones
- CKPDocumento39 páginasCKPFernando VargasAún no hay calificaciones
- Semana 2 PDFDocumento4 páginasSemana 2 PDFDayana Michelle RUIZ CANONAún no hay calificaciones
- Manual de Sala 2022Documento8 páginasManual de Sala 2022Camila RodriguezAún no hay calificaciones
- CV MonicaDocumento2 páginasCV Monicalos desmadres de Ryuji y LotzoAún no hay calificaciones
- SENATI VIRTUAL - Atención Al ClienteDocumento4 páginasSENATI VIRTUAL - Atención Al ClienteJerson Quispe100% (1)
- Periféricos InfogramaDocumento3 páginasPeriféricos InfogramaPablo LucasAún no hay calificaciones
- Bitsdeciencia21 22Documento102 páginasBitsdeciencia21 22elfonoAún no hay calificaciones
- Topicos de Algebra 1Documento5 páginasTopicos de Algebra 1Luis Nina PonceAún no hay calificaciones
- INMOVILIZADORES CLASE 9 y 10Documento39 páginasINMOVILIZADORES CLASE 9 y 10Juniors Cruz100% (1)
- Modulacion FM y AskDocumento8 páginasModulacion FM y Askoscar riseroAún no hay calificaciones
- Formato de Solicitud de Acceso A La Red Gsi - 1Documento1 páginaFormato de Solicitud de Acceso A La Red Gsi - 1Jaime MedranoAún no hay calificaciones
- Examen Sisben App Nota 88Documento11 páginasExamen Sisben App Nota 88ALBERTO BOLIVAR SANTACRUZ PADILLAAún no hay calificaciones
- Leccion 4Documento4 páginasLeccion 4Alex CruzAún no hay calificaciones
- 01 - Guía de Punto Equilibrio - Ev. ProyectosDocumento2 páginas01 - Guía de Punto Equilibrio - Ev. ProyectosVictor Arias Arrue0% (2)
- Funciones 2Documento14 páginasFunciones 2Wladimir Chura LauraAún no hay calificaciones
- Sistemas de ControlDocumento49 páginasSistemas de ControlGloria Cuero Gonzalez100% (1)
- Guía Examen Extraordinario Geometría y TrigonometríaDocumento12 páginasGuía Examen Extraordinario Geometría y TrigonometríaAnonymous TbJ81qEBw33% (3)
- Analisis y Diseño InformeDocumento30 páginasAnalisis y Diseño InformeFrancoRodríguezAún no hay calificaciones
- Solucion Caso Practico Clase 5Documento8 páginasSolucion Caso Practico Clase 5Boris VélezAún no hay calificaciones
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroDe EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroCalificación: 4 de 5 estrellas4/5 (1)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- El Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenDe EverandEl Mom Test: Cómo Mantener Conversaciones con tus Clientes y Validar tu Idea de Negocio Cuando Todos te MientenCalificación: 5 de 5 estrellas5/5 (8)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Calificación: 5 de 5 estrellas5/5 (1)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREDe EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWARECalificación: 4 de 5 estrellas4/5 (13)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressCalificación: 5 de 5 estrellas5/5 (1)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosDe EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosCalificación: 4 de 5 estrellas4/5 (16)
- Radiocomunicaciones: Teoría y principiosDe EverandRadiocomunicaciones: Teoría y principiosCalificación: 5 de 5 estrellas5/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Cultura y clima: fundamentos para el cambio en la organizaciónDe EverandCultura y clima: fundamentos para el cambio en la organizaciónAún no hay calificaciones
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesDe EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesCalificación: 4.5 de 5 estrellas4.5/5 (2)