También podría gustarte
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Fuerza y Potencia de CorteDocumento7 páginasFuerza y Potencia de CorteMaria JoseAún no hay calificaciones
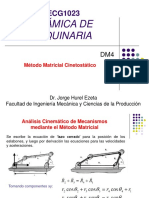
- Clase DM4Documento32 páginasClase DM4ByronAún no hay calificaciones
- Fuerza y Potencia de CorteDocumento7 páginasFuerza y Potencia de CorteMaria JoseAún no hay calificaciones
- Proyecto Flecha 201810 BDocumento1 páginaProyecto Flecha 201810 BKevin KmikzeAún no hay calificaciones
- Diseño de Arboles y Ejes PDFDocumento22 páginasDiseño de Arboles y Ejes PDFAlberto OliverosAún no hay calificaciones
- Ejemplo de Calculo de La Fuerza de TroqueladoDocumento2 páginasEjemplo de Calculo de La Fuerza de TroqueladokAún no hay calificaciones
- Teoria de Maquinas y MecanismosDocumento12 páginasTeoria de Maquinas y MecanismosEdgar ReyesAún no hay calificaciones
- Analisis de Frecuencia Natural en Un Perfil W EmpotradaDocumento9 páginasAnalisis de Frecuencia Natural en Un Perfil W EmpotradaMichael AriasAún no hay calificaciones
- Dimensionamiento de Chavetas (Elementos)Documento3 páginasDimensionamiento de Chavetas (Elementos)Pedro RiveroAún no hay calificaciones
- Analisis Del Mecanismo WhitworthDocumento29 páginasAnalisis Del Mecanismo WhitworthSantiago SacottoAún no hay calificaciones
- Hoja de Procesos FinalizadoDocumento27 páginasHoja de Procesos FinalizadoGary TitoAún no hay calificaciones
- Rectificadores de Onda Continua Con Series de FourierDocumento4 páginasRectificadores de Onda Continua Con Series de FourierLuchinEQAún no hay calificaciones
- Torsion en EjesDocumento18 páginasTorsion en EjesTesla McLovinAún no hay calificaciones
- Engranajes Conicos Con Solid EdgeDocumento7 páginasEngranajes Conicos Con Solid EdgeoycohawkAún no hay calificaciones
- Espesor de La Pelicula000Documento16 páginasEspesor de La Pelicula000Maria Guadalupe GarciaAún no hay calificaciones
- Problemas de Ingenieria de Control IDocumento11 páginasProblemas de Ingenieria de Control IAnonymous AUTTUBAún no hay calificaciones
- 4a-Equivalencias de MecanismosDocumento8 páginas4a-Equivalencias de MecanismosEdwin Abregú LeandroAún no hay calificaciones
- Apendices Diseño de Elementos de MaquinasDocumento28 páginasApendices Diseño de Elementos de MaquinasRoy FloresAún no hay calificaciones
- Diseño y Construcción de Una Máquina para Ensayos de Fatiga de Muestras Planas Por Flexión AlternativaDocumento119 páginasDiseño y Construcción de Una Máquina para Ensayos de Fatiga de Muestras Planas Por Flexión AlternativaLuis Enrique FernandezAún no hay calificaciones
- Parametros de MecanizadoDocumento7 páginasParametros de MecanizadoOrlandoRiosAún no hay calificaciones
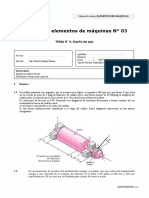
- Semana 03Documento3 páginasSemana 03roy ramos bautistaAún no hay calificaciones
- Operacion de Mecanizado Vertical LEADWELL V-30Documento37 páginasOperacion de Mecanizado Vertical LEADWELL V-30Richard Arizaga100% (1)
- Análisis de MecanismosDocumento224 páginasAnálisis de MecanismosAndres Felipe Celis CandelaAún no hay calificaciones
- I Informe de Laboratorio de Teoria de Maquinas y MecanismosDocumento17 páginasI Informe de Laboratorio de Teoria de Maquinas y MecanismosJOSE FERNANDO MENACHO ABANTOAún no hay calificaciones
- Partes de MecanizadoDocumento33 páginasPartes de MecanizadojonathanAún no hay calificaciones
- Primer Examen Parcial de Procesos I - 2020 PDFDocumento3 páginasPrimer Examen Parcial de Procesos I - 2020 PDFJuan Alvarado LujanAún no hay calificaciones
- Benchman 4000Documento1 páginaBenchman 4000Stefy MorenoAún no hay calificaciones
- Problemas Teoria de Falla 02Documento4 páginasProblemas Teoria de Falla 02Alberto Cárdenas100% (1)
- 03 Ejercicios Ejes y AcoplesDocumento3 páginas03 Ejercicios Ejes y AcoplesLizbeth Fiallos AvilaAún no hay calificaciones
- ACTIVIDAD 3 Uniones RemachadasDocumento16 páginasACTIVIDAD 3 Uniones Remachadasalexis100% (1)
- Caja NortonDocumento5 páginasCaja NortonJosé E. MartínezAún no hay calificaciones
- Caculo EngranajeDocumento67 páginasCaculo Engranajesantiago100% (3)
- Esfuerzos Combinados y Medición de Esfuerzos Pórtico Soportando Una Carga InclinadaDocumento14 páginasEsfuerzos Combinados y Medición de Esfuerzos Pórtico Soportando Una Carga InclinadaBrandon Owens100% (1)
- Informe IiDocumento10 páginasInforme IiYoshi TamashiroAún no hay calificaciones
- Sistema de Transmisión Por EngranajesDocumento58 páginasSistema de Transmisión Por EngranajesJUAN PABLO CASTANO SERNAAún no hay calificaciones
- Diseño de Un EjeDocumento30 páginasDiseño de Un EjeandresAún no hay calificaciones
- 5 10 19 24 MecanismosDocumento4 páginas5 10 19 24 Mecanismoshector ortizAún no hay calificaciones
- Centro de Mecanizado Leadwell V30Documento62 páginasCentro de Mecanizado Leadwell V30AlejoCarreraAún no hay calificaciones
- DiseÑO en Ingenieria Mecanica de Shigley (9 Ed)Documento1 páginaDiseÑO en Ingenieria Mecanica de Shigley (9 Ed)ANDRES CORTES PEÑA50% (2)
- Tren de Engranes Helecoidales de Doble ReduccionDocumento6 páginasTren de Engranes Helecoidales de Doble Reduccioncarlos carrionAún no hay calificaciones
- Deber Cap 13-14Documento9 páginasDeber Cap 13-14Juan Chimarro0% (3)
- Compendio de Mecanismos PDFDocumento406 páginasCompendio de Mecanismos PDFLuis Orlando Silva Vásquez100% (1)
- Deber1 Sigcha RobinsonDocumento2 páginasDeber1 Sigcha RobinsonROBINSON STALIN SIGCHA CUNALATAAún no hay calificaciones
- Proceso de FresadoDocumento26 páginasProceso de FresadoEsteban Quezada NeriAún no hay calificaciones
- Elementos Maquinas - Correas PDFDocumento11 páginasElementos Maquinas - Correas PDFFranco Miguel Pino MarcielAún no hay calificaciones
- Amán Rueda Salguero Ejercicios 3ra Unidad 23 01 2020Documento26 páginasAmán Rueda Salguero Ejercicios 3ra Unidad 23 01 2020Andres Aman Cuadrado0% (1)
- Practica 4 ContadoresDocumento11 páginasPractica 4 ContadoresMario CernaAún no hay calificaciones
- Formulario Engranajes 15-16Documento4 páginasFormulario Engranajes 15-16Fabri GavilanezAún no hay calificaciones
- Tema I Esquemas CinematicosDocumento14 páginasTema I Esquemas CinematicosJosé María Flores RojasAún no hay calificaciones
- Bandas y PoleasDocumento3 páginasBandas y PoleasGerardo Abraham BarrazaAún no hay calificaciones
- Maquinas HerramientasDocumento41 páginasMaquinas HerramientasFacundo_CedronAún no hay calificaciones
- Preparatorio MDocumento2 páginasPreparatorio MIván EspañaAún no hay calificaciones
- Vibraciones MecanicasDocumento5 páginasVibraciones MecanicasErnesto LariosAún no hay calificaciones
- Análisis Cinemático de Mecanismos PlanosDocumento28 páginasAnálisis Cinemático de Mecanismos PlanosMaritza Guadalupe100% (1)
- Unidad IiDocumento20 páginasUnidad IiNeira JhonAún no hay calificaciones
- Analisis de Desplazamientos MecánicosDocumento36 páginasAnalisis de Desplazamientos MecánicosEnrique TopeteAún no hay calificaciones
- Homografía: Homografía: Transformaciones en Visión por ComputadorDe EverandHomografía: Homografía: Transformaciones en Visión por ComputadorAún no hay calificaciones
- Mecanismos Semana 2 19 23 OctDocumento35 páginasMecanismos Semana 2 19 23 OctManuel IturbideAún no hay calificaciones
- Teoria de MecanismosDocumento11 páginasTeoria de MecanismosEvan AVAún no hay calificaciones
- AnalisisCinematico Posicion Semana 3 26 30 Oct - 2Documento22 páginasAnalisisCinematico Posicion Semana 3 26 30 Oct - 2Manuel IturbideAún no hay calificaciones
- Ejercicios Resueltos MecanismosDocumento17 páginasEjercicios Resueltos MecanismosJose Home50% (6)
- Sintesis-Grafica de MacanismosDocumento14 páginasSintesis-Grafica de MacanismosManuel IturbideAún no hay calificaciones
- Sintesis-Grafica de Mecanismos 2Documento39 páginasSintesis-Grafica de Mecanismos 2Manuel IturbideAún no hay calificaciones
- TeoriaDocumento34 páginasTeoriaMauricio GonzalezAún no hay calificaciones
- Concentracion de EsfuerzosDocumento14 páginasConcentracion de EsfuerzosBrayan CamachoAún no hay calificaciones
- Numeros ComplejosDocumento11 páginasNumeros ComplejosLuis Fallas NavarreteAún no hay calificaciones
- FormulasssDocumento5 páginasFormulasssManuel IturbideAún no hay calificaciones
- Metodo de Jacobi y Gauss-SeidelDocumento4 páginasMetodo de Jacobi y Gauss-SeidelJaime Iván Vera MelgarAún no hay calificaciones
- Tratamientostermicosr2 PDFDocumento22 páginasTratamientostermicosr2 PDFMarcos SantanderAún no hay calificaciones
- 01 Problemas IeDocumento5 páginas01 Problemas IeNicolas GualterosAún no hay calificaciones
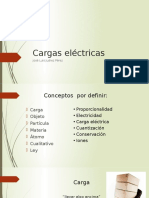
- Cargas Eléctricas2Documento18 páginasCargas Eléctricas2Manuel IturbideAún no hay calificaciones
- Taller 2 2021-2 M.R.F.TDocumento13 páginasTaller 2 2021-2 M.R.F.TMICHAEL RICARDO FAJARDO TORRESAún no hay calificaciones
- Monografía - Dominio y RangoDocumento23 páginasMonografía - Dominio y Rangolisandren_lsr20Aún no hay calificaciones
- Cálculo I 1era ParteDocumento50 páginasCálculo I 1era ParteGeovanny OrtizAún no hay calificaciones
- Tarea 3 - QuizDocumento5 páginasTarea 3 - QuizRaul Andres Castañeda100% (1)
- Ecuacion de La Recta Codigo LatexDocumento4 páginasEcuacion de La Recta Codigo LatexGabriela PinzonAún no hay calificaciones
- Formulario Calculo II Janson Rojas HDocumento2 páginasFormulario Calculo II Janson Rojas HNicolás Prieto CórdovaAún no hay calificaciones
- Reducción Al Primer CuadranteDocumento14 páginasReducción Al Primer CuadranteIng-Jairo Acosta Hoyos100% (1)
- Potencias Guia Respaso 1 MedioDocumento4 páginasPotencias Guia Respaso 1 MedioKaren Bany RebolledoAún no hay calificaciones
- Tarea - Evaluación 2 de Análisis MatemáticoDocumento2 páginasTarea - Evaluación 2 de Análisis MatemáticoJose Manuel Palma AsencioAún no hay calificaciones
- Trabajo Escrito. Secciones ConicasDocumento17 páginasTrabajo Escrito. Secciones ConicasGabriel Guanipa100% (1)
- Mini Ensayo PSU Nùmeros RealesDocumento4 páginasMini Ensayo PSU Nùmeros RealesMartina GonzálezAún no hay calificaciones
- Analisis Matematico I - Espinoza - 4ed PDFDocumento530 páginasAnalisis Matematico I - Espinoza - 4ed PDFDouglas Gabriel Palacios Garcia100% (4)
- Guia 1 Unidad 1Documento8 páginasGuia 1 Unidad 1Karla María Barillas PachecoAún no hay calificaciones
- S-12-Ecuaciones Lineales y CuadraticasDocumento15 páginasS-12-Ecuaciones Lineales y CuadraticasJuan Carlos Cabanillas VillalobosAún no hay calificaciones
- Matlab - Ecuación Diferencial de Segundo OrdenDocumento3 páginasMatlab - Ecuación Diferencial de Segundo OrdenAldo Contreras SalinasAún no hay calificaciones
- Unidad 1. Teoria de ConjuntosDocumento34 páginasUnidad 1. Teoria de ConjuntosHennessysAún no hay calificaciones
- AlgebraDocumento51 páginasAlgebraDaira Abigail Burgos BaquedanoAún no hay calificaciones
- Ejer1 1deber4Documento6 páginasEjer1 1deber4Diana BarrosAún no hay calificaciones
- Pendientes 3eso Mates REPASPDocumento11 páginasPendientes 3eso Mates REPASPPaula Figueras TolósAún no hay calificaciones
- Trabajo Práctico Quinto Año - Potenciación y Radicación)Documento13 páginasTrabajo Práctico Quinto Año - Potenciación y Radicación)Darwin LucenaAún no hay calificaciones
- Función CuadráticaDocumento5 páginasFunción CuadráticaPaula RuizAún no hay calificaciones
- Teoria de InecuacionesDocumento4 páginasTeoria de InecuacionesManson CradenAún no hay calificaciones
- X Sem21Documento8 páginasX Sem21antonioAún no hay calificaciones
- Clase UTECDocumento14 páginasClase UTECKenshin HimuraAún no hay calificaciones
- Ejercicios OptimizaciónDocumento3 páginasEjercicios OptimizaciónJuan Carlos Fernández DuránAún no hay calificaciones
- Movimiento Parabolico FisicaDocumento43 páginasMovimiento Parabolico FisicaWilman X-lawyersAún no hay calificaciones
- Modelado CinemáticoDocumento45 páginasModelado CinemáticoLuis Aké MéndezAún no hay calificaciones
- Formula Rio 1Documento3 páginasFormula Rio 1Edzon YujraAún no hay calificaciones
- Parcial 1 1-2010Documento3 páginasParcial 1 1-2010Vicente Johan Manuel Rico100% (1)