También podría gustarte
- DesgasteDocumento17 páginasDesgasteSergio Camacho SarmientoAún no hay calificaciones
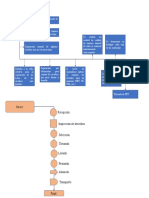
- Diagrama de BloquesDocumento2 páginasDiagrama de BloquesSergio Camacho SarmientoAún no hay calificaciones
- 1 - Fundamento Teórico de La VibDocumento36 páginas1 - Fundamento Teórico de La VibSergio Camacho SarmientoAún no hay calificaciones
- ResueltoDocumento5 páginasResueltoSergio Camacho SarmientoAún no hay calificaciones
- Taller CompresDocumento2 páginasTaller CompresSergio Camacho SarmientoAún no hay calificaciones
- Hospital General de 34 Camas Del Imss Municipio de Zumpango Estado de México Te10585Documento206 páginasHospital General de 34 Camas Del Imss Municipio de Zumpango Estado de México Te10585Jose De la CruzAún no hay calificaciones
- Ficha Registro Instructivo InmuebleDocumento4 páginasFicha Registro Instructivo InmuebleCristian Tuqueres100% (1)
- VT Nanomedicina EiaDocumento107 páginasVT Nanomedicina Eiaehid100% (1)
- Análisis de Peligros en Las Materias Primas Usadas para La Elaboración de Néctar de DuraznoDocumento21 páginasAnálisis de Peligros en Las Materias Primas Usadas para La Elaboración de Néctar de DuraznoBlacker Renzo Choque ZapanaAún no hay calificaciones
- Grupo de Actividades Regimen Simple de TributacionDocumento21 páginasGrupo de Actividades Regimen Simple de Tributacionpasajes m&a serviceAún no hay calificaciones
- Proyecto SocioproductivoDocumento7 páginasProyecto SocioproductivoJorge Luis MartínezAún no hay calificaciones
- Desafíos e Intereses Profesionales - APPFinal - FinalDocumento4 páginasDesafíos e Intereses Profesionales - APPFinal - FinalJAVIERA IGNACIA GUTIERREZ NAVARROAún no hay calificaciones
- Guía Didáctica Nutrición Stay HealthyDocumento13 páginasGuía Didáctica Nutrición Stay HealthyAna Maria López NavajasAún no hay calificaciones
- Misiones Tu Escuela - Jornada Institucional Secundaria 2022Documento7 páginasMisiones Tu Escuela - Jornada Institucional Secundaria 2022Hugo Ariel FigueredoAún no hay calificaciones
- Características de Los Gobiernos Del PLD en Los Últimos 10años y Su Diferencia Con Los Gobiernos Del PR PDFDocumento26 páginasCaracterísticas de Los Gobiernos Del PLD en Los Últimos 10años y Su Diferencia Con Los Gobiernos Del PR PDFLeidy Diana Paulino OAún no hay calificaciones
- Protecion de Datos PersonaelesDocumento7 páginasProtecion de Datos PersonaelesVelkys Canabal marrugoAún no hay calificaciones
- Acido Cloridrico - 00173Documento7 páginasAcido Cloridrico - 00173PABLO FIGUEROA CARDENASAún no hay calificaciones
- La Cobardia y Valentía de GedeónDocumento18 páginasLa Cobardia y Valentía de GedeónIglesia Cristiana La FuenteAún no hay calificaciones
- Informe Del Ciclo CelularDocumento3 páginasInforme Del Ciclo CelularGaby GuerraAún no hay calificaciones
- 325 Junio 10 de 2022: ConsiderandoDocumento2 páginas325 Junio 10 de 2022: Considerandojesus alberto olivos malpicaAún no hay calificaciones
- Mercadotecnia N6 - Equipo 10 - ActividadesDocumento47 páginasMercadotecnia N6 - Equipo 10 - ActividadesMartin SantiagoAún no hay calificaciones
- Ciclo de Vida de Las Tortugas MarinasDocumento3 páginasCiclo de Vida de Las Tortugas MarinasAnonymous dkgY1XxeCAún no hay calificaciones
- Plan Anual 4bach. QuímicaDocumento5 páginasPlan Anual 4bach. QuímicaemersonAún no hay calificaciones
- Actividades Leyes de Los GasesDocumento1 páginaActividades Leyes de Los GasesJacqueline ServantAún no hay calificaciones
- Seleccionar Los Sistemas Básicos de Automatización, Así Como Los Elementos A Implementar, Atendiendo Los Requerimientos Establecidos PDFDocumento4 páginasSeleccionar Los Sistemas Básicos de Automatización, Así Como Los Elementos A Implementar, Atendiendo Los Requerimientos Establecidos PDFAndresCarvajalOrtegaAún no hay calificaciones
- S01.s1 - Taller 1 (Enteros - Fracciones)Documento2 páginasS01.s1 - Taller 1 (Enteros - Fracciones)Jhonatan Castillo YenqueAún no hay calificaciones
- Ejercicio de Costos AbcDocumento2 páginasEjercicio de Costos AbcDiwardEnriqueOsorioMazaAún no hay calificaciones
- Desnivel Especial MontserratDocumento84 páginasDesnivel Especial MontserratpacoAún no hay calificaciones
- Propuesta AseoDocumento13 páginasPropuesta AseoJOHN JENNER BERMUDEZ OSPINAAún no hay calificaciones
- Magia y BrujeríaDocumento6 páginasMagia y BrujeríaSonia Vidal SanzanaAún no hay calificaciones
- Prácticas de Simulación Númerica en Mecánica de FluidosDocumento68 páginasPrácticas de Simulación Númerica en Mecánica de FluidosLuispino SotoAún no hay calificaciones
- 0 - Principios de La PlanificacionDocumento16 páginas0 - Principios de La PlanificacionCarlos Diego Efe Zent100% (1)
- Yii Framework Tutorial EspañolDocumento19 páginasYii Framework Tutorial EspañolIvan FernandezAún no hay calificaciones
- Taller de Refuerzo # 5 ProbabilidadDocumento7 páginasTaller de Refuerzo # 5 ProbabilidadJUAN CAMILO GUAQUETA CASTANEDAAún no hay calificaciones
- 2 Prevencion Robo PDFDocumento18 páginas2 Prevencion Robo PDFTammy Muñoz100% (2)
- Química orgánica: ejercicios de aplicaciónDe EverandQuímica orgánica: ejercicios de aplicaciónCalificación: 5 de 5 estrellas5/5 (3)
- Flujo de fluidos e intercambio de calorDe EverandFlujo de fluidos e intercambio de calorCalificación: 1 de 5 estrellas1/5 (1)
- La Física - Aventura del pensamientoDe EverandLa Física - Aventura del pensamientoCalificación: 4.5 de 5 estrellas4.5/5 (9)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- La partícula de Dios. El origen del universo, hoy. La verdad última entre la ciencia y la religiónDe EverandLa partícula de Dios. El origen del universo, hoy. La verdad última entre la ciencia y la religiónCalificación: 4.5 de 5 estrellas4.5/5 (10)
- MATEMÁTICAS Fórmulas, reglas y reglas mnemotécnicasDe EverandMATEMÁTICAS Fórmulas, reglas y reglas mnemotécnicasAún no hay calificaciones
- Física mecánica: Nivelación para estudiantes universitariosDe EverandFísica mecánica: Nivelación para estudiantes universitariosCalificación: 4 de 5 estrellas4/5 (7)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- La sanacion anticipada. El uso de la energía a través de la intenciónDe EverandLa sanacion anticipada. El uso de la energía a través de la intenciónCalificación: 4 de 5 estrellas4/5 (13)
- El principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarDe EverandEl principio de posibilidad: Cómo la física cuántica puede mejorar tu forma de pensar, vivir y amarCalificación: 4 de 5 estrellas4/5 (6)