También podría gustarte
- Métodos Matriciales para ingenieros con MATLABDe EverandMétodos Matriciales para ingenieros con MATLABCalificación: 5 de 5 estrellas5/5 (1)
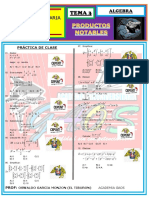
- Productos NotablesDocumento12 páginasProductos Notablesluis fernando lopez quispeAún no hay calificaciones
- OrtogonalidadDocumento9 páginasOrtogonalidadwsoncoAún no hay calificaciones
- 4PC-DE-FISICA-I - UniDocumento9 páginas4PC-DE-FISICA-I - UniRamírez Breña JosecarlosAún no hay calificaciones
- Clasalgebra 04Documento4 páginasClasalgebra 04Manayay WilmerAún no hay calificaciones
- Álgebra Productos Notables EdumasDocumento4 páginasÁlgebra Productos Notables EdumasPERCY VITON DIAZAún no hay calificaciones
- Solucionario Primer Examen Parcial Matematicas II - 230921 - 135822Documento3 páginasSolucionario Primer Examen Parcial Matematicas II - 230921 - 135822Nestor Brayan Lazo LluscoAún no hay calificaciones
- TERCERA Tarea AlgebraDocumento1 páginaTERCERA Tarea AlgebraErick Ccalluche HuamaniAún no hay calificaciones
- Formulario Productos NotablesDocumento8 páginasFormulario Productos NotablesNilton Alonso Ramos RodriguezAún no hay calificaciones
- Guia I Axiomas de Cuerpo de Los Reales y Propiedades en IR Relacionadas Con La IgualdadDocumento3 páginasGuia I Axiomas de Cuerpo de Los Reales y Propiedades en IR Relacionadas Con La IgualdadNicolas Prado OrellanaAún no hay calificaciones
- Algebra Productos NotablesDocumento4 páginasAlgebra Productos NotablesAlvaro Ccosco MendozaAún no hay calificaciones
- Sintitul 2Documento24 páginasSintitul 2KevinKisshhPeraltaRiosAún no hay calificaciones
- Semana3 - Números Reales e InecuacionesDocumento17 páginasSemana3 - Números Reales e InecuacionesAlvaro Cotrina ZamoraAún no hay calificaciones
- Problemas Propuestos de Algebra Pre-Universitaria Ccesa007Documento36 páginasProblemas Propuestos de Algebra Pre-Universitaria Ccesa007Demetrio Ccesa Rayme100% (1)
- S14.2 - Determinantes IiDocumento26 páginasS14.2 - Determinantes IiLuis Nicolas Jimenez ChungaAún no hay calificaciones
- Productos NotablesDocumento4 páginasProductos NotablesRichard Oswaldo Saldaña Perez100% (1)
- 2º Pràctica DirigidaDocumento3 páginas2º Pràctica Dirigidagetsu cruz rimachiAún no hay calificaciones
- ALGEBRA 1.1productos NotablesDocumento21 páginasALGEBRA 1.1productos NotablesJesus DiapizAún no hay calificaciones
- Sesion 3 - Transformación de Radicales Dobles A Simples - 3ero Avanzado - EneroDocumento4 páginasSesion 3 - Transformación de Radicales Dobles A Simples - 3ero Avanzado - EneroleonardoAún no hay calificaciones
- Mii T3 2008Documento13 páginasMii T3 2008Marta Espiñeira CarmonaAún no hay calificaciones
- Analisis Vectorial Ejercicios ResueltosDocumento7 páginasAnalisis Vectorial Ejercicios ResueltosEver Perez Gonzales100% (1)
- Mipm - U2 - Ea - V1 - JomeDocumento10 páginasMipm - U2 - Ea - V1 - Jomejuan mezaAún no hay calificaciones
- Soluc Gav p2Documento4 páginasSoluc Gav p2DavidAún no hay calificaciones
- Productos NotablesDocumento4 páginasProductos Notablesestrella alvarez romeroAún no hay calificaciones
- Semana 3Documento8 páginasSemana 3Piero ManzanaresAún no hay calificaciones
- Practico# 5 - ESPACIOS VECTORIALESDocumento3 páginasPractico# 5 - ESPACIOS VECTORIALESMirko SandovalAún no hay calificaciones
- Productos Notables-Logik PDFDocumento10 páginasProductos Notables-Logik PDFExcelencia PreAún no hay calificaciones
- Producto Escalar y Vectorial-2021-I-Virtual PDFDocumento4 páginasProducto Escalar y Vectorial-2021-I-Virtual PDFFrank Chavez LinaresAún no hay calificaciones
- Ficha 2 Determinantes - ExerciciosDocumento2 páginasFicha 2 Determinantes - ExerciciosTrevorsAún no hay calificaciones
- Ejercicios de Matrices-2 PDFDocumento6 páginasEjercicios de Matrices-2 PDFJohn Alexander PiranequeAún no hay calificaciones
- Espacios Vectoriales-1Documento3 páginasEspacios Vectoriales-1jhery22222Aún no hay calificaciones
- Clase Virtual 2 Producto Escalar - AplicacionesDocumento5 páginasClase Virtual 2 Producto Escalar - AplicacionesGaro Enrique Martinez SislianAún no hay calificaciones
- 03 TP 3 Laboratorio de CálculoDocumento12 páginas03 TP 3 Laboratorio de CálculoEmi ScottoAún no hay calificaciones
- Caratula Productos NotablesDocumento4 páginasCaratula Productos Notablesyoel mazco velasquezAún no hay calificaciones
- Solución 01Documento4 páginasSolución 01Licely ZavaletaAún no hay calificaciones
- Práctica Calificada #2 2021-II Álgebra LinealDocumento1 páginaPráctica Calificada #2 2021-II Álgebra LinealHaxel Pelayo GarciaAún no hay calificaciones
- Tarea 1Documento3 páginasTarea 1Mitzi Selene Morales PiedrasAún no hay calificaciones
- S1 - Matrices, Operaciones Con Matrices y AplicacionesDocumento3 páginasS1 - Matrices, Operaciones Con Matrices y AplicacionesAndrea GarciaAún no hay calificaciones
- Principio de Analisis VectorialDocumento5 páginasPrincipio de Analisis VectorialDaniel Valdivia100% (1)
- Formulario Productos Notables PDFDocumento4 páginasFormulario Productos Notables PDFcholovelez100% (1)
- Clase 10. N-VectoresDocumento36 páginasClase 10. N-VectoresPorras Vasquez EvelinAún no hay calificaciones
- Método Simpson - Integración NuméricaDocumento15 páginasMétodo Simpson - Integración NuméricaCris AcevedoAún no hay calificaciones
- Elipse e HipérbolaDocumento16 páginasElipse e HipérbolaLINDA CHUSANAún no hay calificaciones
- Analisis Vectorial Ejercicios ResueltosDocumento7 páginasAnalisis Vectorial Ejercicios ResueltosEdwin GonzalesAún no hay calificaciones
- Taller de Vectores IDocumento2 páginasTaller de Vectores IangieAún no hay calificaciones
- TRABAJO PRÁCTICO 2 - MatricesDocumento3 páginasTRABAJO PRÁCTICO 2 - MatricesPATRICIO BORDONAún no hay calificaciones
- Guía 4 - Matrices y DeterminantesDocumento5 páginasGuía 4 - Matrices y DeterminantesThiago MastronardiAún no hay calificaciones
- XD XDDocumento9 páginasXD XDBeto Guevara CastilloAún no hay calificaciones
- Ecuaciones 2x2 y Cuadraticas ResueltoDocumento1 páginaEcuaciones 2x2 y Cuadraticas ResueltoreneAún no hay calificaciones
- Proyección y Componente OrtogonalDocumento13 páginasProyección y Componente OrtogonalEstefany OrtegaAún no hay calificaciones
- Ejercicios Resueltos MatricesDocumento5 páginasEjercicios Resueltos MatricesValentina DistefanoAún no hay calificaciones
- Ficha MatricesDocumento2 páginasFicha MatricesClaudia GonzalezAún no hay calificaciones
- Algebra Sem 04 - 2022 IDocumento4 páginasAlgebra Sem 04 - 2022 IAlvaro MaldonadoAún no hay calificaciones
- Academia Gaos Algebra Semana 3 - ArcosDocumento2 páginasAcademia Gaos Algebra Semana 3 - ArcoselliAún no hay calificaciones
- Geometría SolucionesDocumento112 páginasGeometría SolucionesAlvaro Sanchez MuñozAún no hay calificaciones
- 5 Productos NotablesDocumento9 páginas5 Productos NotablesQuispe Cruz Prisila JazminAún no hay calificaciones
- Examen-Estadistica-9-01-2015 (Revisar)Documento10 páginasExamen-Estadistica-9-01-2015 (Revisar)bryam sotoAún no hay calificaciones
- 1 Unidades y VectoresDocumento2 páginas1 Unidades y VectoresGuille SanchezAún no hay calificaciones
- Ejercicios Vectores UNEDDocumento1 páginaEjercicios Vectores UNEDJose Maria Lopez BelinchonAún no hay calificaciones
- Reflexiones Sobre La Identidad Narrativa Del MaestroDocumento27 páginasReflexiones Sobre La Identidad Narrativa Del MaestroMirian perezAún no hay calificaciones
- Principio de Exclusión de PauliDocumento3 páginasPrincipio de Exclusión de Paulijjjaviii2001Aún no hay calificaciones
- Examen Mensual de Biologia 345 SecDocumento1 páginaExamen Mensual de Biologia 345 SecVictor RosasAún no hay calificaciones
- Coros Pentecostales IeppDocumento9 páginasCoros Pentecostales IeppWendy A. Camones50% (2)
- Libro 53 Lamparas FluorescentesdDocumento114 páginasLibro 53 Lamparas FluorescentesdXtian JesúsAún no hay calificaciones
- Diptico BiotinaDocumento2 páginasDiptico BiotinaHc HairconceptAún no hay calificaciones
- Autoestima 2Documento30 páginasAutoestima 2Yemina Rosalía Dupertuis BalpredaAún no hay calificaciones
- Crianza de AjolotesDocumento38 páginasCrianza de Ajolotesadrian chavAún no hay calificaciones
- Clasificación Biologica. Parte 1Documento2 páginasClasificación Biologica. Parte 1xulaAún no hay calificaciones
- Tees (Acero) (Apa)Documento11 páginasTees (Acero) (Apa)Johanna Estefania Tituaña AnchundiaAún no hay calificaciones
- TIBITOCDocumento12 páginasTIBITOCJimmyAlbertCardenasVargas0% (1)
- Amplios Ejemplos de InnovaciónDocumento14 páginasAmplios Ejemplos de InnovaciónLAURA CAMILA MARTINEZ AGUILARAún no hay calificaciones
- Cuentas TDocumento21 páginasCuentas TNICOL DAYANA GOMEZ MARTINEZ0% (1)
- Taller de Funciones Especiales 2020 - 1Documento3 páginasTaller de Funciones Especiales 2020 - 1rafaelAún no hay calificaciones
- Piratas - Bucaneros - Filibusteros - Corsarios en América-OkDocumento325 páginasPiratas - Bucaneros - Filibusteros - Corsarios en América-OkFrancisco Javier ParedesAún no hay calificaciones
- El Imperio Inca en Su Momento de Máxima ExpansiónDocumento14 páginasEl Imperio Inca en Su Momento de Máxima Expansiónlina mejiaAún no hay calificaciones
- 5 - Nutrición Del Paciente CardíacoDocumento6 páginas5 - Nutrición Del Paciente CardíacoAxoncomunicacionAún no hay calificaciones
- AcusticaDocumento21 páginasAcusticadavid roldanAún no hay calificaciones
- 7 Bebidas para Limpiar Tu Hígado NaturalmenteDocumento9 páginas7 Bebidas para Limpiar Tu Hígado NaturalmenteEdgar Cayllahua Quispe100% (1)
- Clasificacion de Ciencias y Enfoques (Final)Documento4 páginasClasificacion de Ciencias y Enfoques (Final)Eduardo HAún no hay calificaciones
- Ensayo Et Nivelacion FBDocumento14 páginasEnsayo Et Nivelacion FBKristina SlipchencoAún no hay calificaciones
- Guía Artes 5° 2Documento4 páginasGuía Artes 5° 2albaAún no hay calificaciones
- Caso Clinico PrevenimssDocumento11 páginasCaso Clinico PrevenimssManlio Fabio Felix100% (1)
- Trastornos SomatomorfosDocumento45 páginasTrastornos SomatomorfosromeomedicinaAún no hay calificaciones
- Sri CiuDocumento372 páginasSri CiuAnonymous BUSFqHpAún no hay calificaciones
- Manual de Agua ClarificadaDocumento18 páginasManual de Agua ClarificadaGerardoAún no hay calificaciones
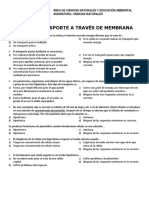
- Taller de Transporte A Través de La MembranaDocumento3 páginasTaller de Transporte A Través de La MembranaNohora Juliana Rueda ForeroAún no hay calificaciones
- DICS Dgin QSMA IB Simulador P463 F002 RazonamientoDocumento10 páginasDICS Dgin QSMA IB Simulador P463 F002 RazonamientoMary KanirasAún no hay calificaciones
- Tornos IndustrialesDocumento14 páginasTornos IndustrialesMartita AlvarezAún no hay calificaciones
- No2 2016Documento1 páginaNo2 2016Sebastian Ruiz Peralta0% (1)