
También podría gustarte
- Ejercicios de potencia, series de Taylor y FourierDe EverandEjercicios de potencia, series de Taylor y FourierAún no hay calificaciones
- Guia Control I Unexpo PDFDocumento59 páginasGuia Control I Unexpo PDFSanders GoycoAún no hay calificaciones
- Informe Final CircuitosDocumento15 páginasInforme Final CircuitosBryan Brandon Ledesma CasasAún no hay calificaciones
- Informe Clase DDocumento35 páginasInforme Clase DJhonattan YanqueAún no hay calificaciones
- Respuesta A La Función Escalón en Un Circuito R-L-C ParaleloDocumento8 páginasRespuesta A La Función Escalón en Un Circuito R-L-C ParaleloAbel Menendez RamosAún no hay calificaciones
- Trabajo DomiciliarioDocumento6 páginasTrabajo Domiciliariocomte6668991Aún no hay calificaciones
- Características de Los Semiconductores de PotenciaDocumento5 páginasCaracterísticas de Los Semiconductores de PotenciaFernando ZambranoAún no hay calificaciones
- Lab3 LL H H PDFDocumento20 páginasLab3 LL H H PDFAlvaro LCAún no hay calificaciones
- FinalPractica 1 Neira Sisa EdyyDocumento33 páginasFinalPractica 1 Neira Sisa EdyySantiNeiraAún no hay calificaciones
- Procesamiento Digital de SeñalesDocumento11 páginasProcesamiento Digital de SeñalesElvis Justo Vilca CárdenasAún no hay calificaciones
- Huffman MatlabDocumento2 páginasHuffman MatlabJose AGAún no hay calificaciones
- Informe Sample and HoldDocumento2 páginasInforme Sample and HoldLAURA NATALIA MOTTA CADENAAún no hay calificaciones
- CAPITULO 2 ModificadoDocumento48 páginasCAPITULO 2 ModificadoJhoan Sebastián Henao MorenoAún no hay calificaciones
- Práctica 1Documento11 páginasPráctica 1Marlav Zoreke100% (1)
- Lab de Control - 2do Informe FinalDocumento10 páginasLab de Control - 2do Informe FinalIVAN ALONSO CCAHUACHIA LETONAAún no hay calificaciones
- Informe I - UNMSM - SCII - MANDUJANODocumento12 páginasInforme I - UNMSM - SCII - MANDUJANOAmerico MedinaAún no hay calificaciones
- Análisis de EstabilidadDocumento12 páginasAnálisis de EstabilidadAlberto Miguel Quispe LimaAún no hay calificaciones
- Movimiento de RototraslacionDocumento6 páginasMovimiento de RototraslacionFranciscoAún no hay calificaciones
- Videojuego FPGA en VHDLDocumento21 páginasVideojuego FPGA en VHDLdasman182Aún no hay calificaciones
- Practica 1 Sistema de Primer OrdenDocumento9 páginasPractica 1 Sistema de Primer OrdenArmando ArandaAún no hay calificaciones
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsDocumento20 páginasLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioAún no hay calificaciones
- Amplificador de 100 WattsDocumento8 páginasAmplificador de 100 WattsNelson David de la CruzAún no hay calificaciones
- Programa para Llenado de TanquesDocumento16 páginasPrograma para Llenado de TanquesDavidVX25Aún no hay calificaciones
- Práctica 6Documento14 páginasPráctica 6Calvin CantuAún no hay calificaciones
- Trans Tema3Documento62 páginasTrans Tema3opachecoAún no hay calificaciones
- Resumen de Control AvanzadoDocumento4 páginasResumen de Control AvanzadoMishell Sanchez GuevaraAún no hay calificaciones
- Criterio de Estabilidad de Nyquist EXPONERDocumento22 páginasCriterio de Estabilidad de Nyquist EXPONERLuciano Ezequiel Quinto ContrerasAún no hay calificaciones
- Laboratorio N°4Documento23 páginasLaboratorio N°4Kevin Palma100% (1)
- Laboratorio DarligtonDocumento6 páginasLaboratorio DarligtonLinda VanegasAún no hay calificaciones
- Controlador AsignacPolos ObservadoresDocumento21 páginasControlador AsignacPolos ObservadoresAbrahan BaezaAún no hay calificaciones
- ACTIVIDAD 2 - Representación en Espacio de EstadoDocumento13 páginasACTIVIDAD 2 - Representación en Espacio de EstadoJorge Esteban Martínez MacancelaAún no hay calificaciones
- Repaso Grafico LGR y Sistemas de Fase No MinimaDocumento35 páginasRepaso Grafico LGR y Sistemas de Fase No MinimaJUAN REYES TRONCOSOAún no hay calificaciones
- Reporte Masa Resorte y Sistema de Transferencia de Funcion PDFDocumento8 páginasReporte Masa Resorte y Sistema de Transferencia de Funcion PDFEdgar Adriano Arce VeraAún no hay calificaciones
- Control Digital Taller 1Documento3 páginasControl Digital Taller 1Omar David Peña IbarraAún no hay calificaciones
- Apuntes de Procesamiento Digital de SeñalesDocumento7 páginasApuntes de Procesamiento Digital de SeñalesDavidAún no hay calificaciones
- Ejercicios NyquistDocumento19 páginasEjercicios Nyquistchiquitodeoz92Aún no hay calificaciones
- Tema 04 - Respuesta Temporal Con Routh v2 - VicenteDocumento80 páginasTema 04 - Respuesta Temporal Con Routh v2 - Vicentecristianc2ga92Aún no hay calificaciones
- Práctica 8 Probador de CristalesDocumento5 páginasPráctica 8 Probador de CristalesDiacono10Aún no hay calificaciones
- Polos y CerosDocumento18 páginasPolos y Cerosramon infanteAún no hay calificaciones
- M Comunicaciones Digitales 2021-1Documento88 páginasM Comunicaciones Digitales 2021-1ALEX5154411Aún no hay calificaciones
- CIII G2 InformeFinal NuñezMessaDocumento11 páginasCIII G2 InformeFinal NuñezMessaLeonardo Núñez MessaAún no hay calificaciones
- Taller Transformada ZDocumento4 páginasTaller Transformada ZAlejandro RiosAún no hay calificaciones
- Modulador y Demodulador Am Practica de LabDocumento3 páginasModulador y Demodulador Am Practica de LabRihe CaAún no hay calificaciones
- Configuración DarlingtonDocumento5 páginasConfiguración DarlingtonAlejandro Olivera0% (1)
- Comandos MatlabDocumento1 páginaComandos MatlabdkAún no hay calificaciones
- Ejemplos Respuesta Al ImpulsoDocumento5 páginasEjemplos Respuesta Al ImpulsoChristopher Montiel RivasAún no hay calificaciones
- Implementación y Uso de Algoritmo Recursivo de Mínimos Cuadrados en Circuito RCDocumento3 páginasImplementación y Uso de Algoritmo Recursivo de Mínimos Cuadrados en Circuito RCLuis D. Barrera Gamboa100% (1)
- Laboratorio PCM 2Documento4 páginasLaboratorio PCM 2Checho LopezAún no hay calificaciones
- 3er Lab SDCDocumento26 páginas3er Lab SDCRuben Hernandez100% (1)
- Generación de Señales en MatlabDocumento3 páginasGeneración de Señales en MatlabHilda CördovæAún no hay calificaciones
- Matlab Laboratorio 2Documento21 páginasMatlab Laboratorio 2Gilmer Jose Vizcarra AvilaAún no hay calificaciones
- Clase de Amplif Clase DDocumento38 páginasClase de Amplif Clase DLuis Adrian CamachoAún no hay calificaciones
- Reporte 2 Lazo CerradoDocumento5 páginasReporte 2 Lazo CerradoSamuel RodríguezAún no hay calificaciones
- Practica No 4 Modulación / Demodulación de Fase (PM) : 1. Materiales Y EquiposDocumento3 páginasPractica No 4 Modulación / Demodulación de Fase (PM) : 1. Materiales Y EquiposAngie Pachon0% (1)
- Respuesta TransitoriaDocumento13 páginasRespuesta TransitoriaJulmarAún no hay calificaciones
- Respuesta TransitoriaDocumento15 páginasRespuesta TransitoriaBen DerAún no hay calificaciones
- Sistemas de Control GUIA 3Documento6 páginasSistemas de Control GUIA 3LeopoldoMenesesRinconAún no hay calificaciones
- UNIDAD 3 Control Automatico Estabilidad de SistemasDocumento31 páginasUNIDAD 3 Control Automatico Estabilidad de SistemasJose de la Cruz Angulo AlvaradoAún no hay calificaciones
- Documento 5Documento7 páginasDocumento 5Noelia CollanteAún no hay calificaciones
- Xdoc - MX Control AvanzadoDocumento10 páginasXdoc - MX Control AvanzadoHuyThaiAún no hay calificaciones
- Pack Examen de ControlDocumento1 páginaPack Examen de ControlElizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- Examen de Entrada (0.0.1)Documento1 páginaExamen de Entrada (0.0.1)Elizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- Examen de Entrada (0.0.1)Documento1 páginaExamen de Entrada (0.0.1)Elizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- Ley 29783 - LPDocumento64 páginasLey 29783 - LPElizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- Iperc Anexo 3Documento3 páginasIperc Anexo 3Elizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- Roma para Primer Grado de SecundariaDocumento4 páginasRoma para Primer Grado de SecundariaElizabeth Milene Ccorimanya Alvarez100% (1)
- Las Estrellas y El Sistema Solar para Primer Grado de SecundariaDocumento4 páginasLas Estrellas y El Sistema Solar para Primer Grado de SecundariaElizabeth Milene Ccorimanya Alvarez100% (1)
- Identidad y AdolescenciaDocumento3 páginasIdentidad y AdolescenciaElizabeth Milene Ccorimanya AlvarezAún no hay calificaciones
- #High 5 Marce FitnessDocumento22 páginas#High 5 Marce FitnessKathe Sancé100% (4)
- Actividad 3Documento10 páginasActividad 3Caterlin Del Carmen BENAVIDEZ GALANAún no hay calificaciones
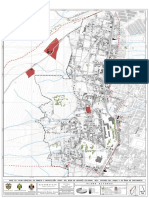
- Plano AlturasDocumento1 páginaPlano AlturasJeyson Duván López Castillo100% (1)
- Libro1 Ficha SiamDocumento1 páginaLibro1 Ficha SiamFernando BenitesAún no hay calificaciones
- Manual de Consolidacion A Personal Laboral Fijo en CorreosDocumento618 páginasManual de Consolidacion A Personal Laboral Fijo en CorreosMuscupiesquiAún no hay calificaciones
- Analisis Del Fallo CSJ-PS-Genesis AndinoDocumento21 páginasAnalisis Del Fallo CSJ-PS-Genesis AndinoGénesis Andino100% (2)
- Taxonomías Listas YasminDocumento52 páginasTaxonomías Listas YasminJamil BironAún no hay calificaciones
- Importancia de La Vivenciacion de Tiempo en La EducacionDocumento11 páginasImportancia de La Vivenciacion de Tiempo en La Educacionalex lopezAún no hay calificaciones
- 6 Compromisos de Gestion Escolar para El 2016Documento70 páginas6 Compromisos de Gestion Escolar para El 2016ShirleyFelicitaMalcaFloresAún no hay calificaciones
- Clase 1 Introduccion A La Gastronomia Historia y Evolucion de La Cocina Terminos y Principios Basicos de La GastronomiaDocumento20 páginasClase 1 Introduccion A La Gastronomia Historia y Evolucion de La Cocina Terminos y Principios Basicos de La GastronomiaMafer Zaid25% (4)
- Inducción Lifestyle 2022 PDFDocumento95 páginasInducción Lifestyle 2022 PDFAntonia RubilarAún no hay calificaciones
- Examen Psicometrico Conciliacion BasicoDocumento2 páginasExamen Psicometrico Conciliacion BasicoSkyPatrol Monitoreo Satelital100% (1)
- Recibo de SueldoDocumento2 páginasRecibo de SueldoSTAY MedellinAún no hay calificaciones
- Autoestima y AgresividadDocumento64 páginasAutoestima y AgresividadH Billy Bustamante100% (2)
- Informe Tecnico QuiruvilcaDocumento16 páginasInforme Tecnico QuiruvilcaRichard DavilaAún no hay calificaciones
- Oraciones de ReparacionDocumento7 páginasOraciones de ReparacionELSA100% (2)
- Optometría - Ishihara y OftalmologíaDocumento5 páginasOptometría - Ishihara y OftalmologíajuniorcanasalvarezAún no hay calificaciones
- Linea Del Tiempo Estudio Dificultedes de AprendizajeDocumento2 páginasLinea Del Tiempo Estudio Dificultedes de AprendizajeLuis Enrique80% (15)
- TERMODINÁMICADocumento30 páginasTERMODINÁMICAEvaAún no hay calificaciones
- Manual Saber para CrecerDocumento230 páginasManual Saber para Crecertamara elieth aburto bojorgeAún no hay calificaciones
- 1.2 Cerebro Del Niño PDFDocumento15 páginas1.2 Cerebro Del Niño PDFKatrina BowenAún no hay calificaciones
- Guía de Trabajo N°8 Historia 2° Básico 25 Al 29 de MayoDocumento3 páginasGuía de Trabajo N°8 Historia 2° Básico 25 Al 29 de MayoSanti Las BrisasAún no hay calificaciones
- Entrega 3 RSEDocumento11 páginasEntrega 3 RSEcieris gomez cortesAún no hay calificaciones
- 01 Documentación Curso Agua SubterráneaDocumento323 páginas01 Documentación Curso Agua SubterráneaBerlin Alex Garcia CheroAún no hay calificaciones
- Poblacion Colombiana 8 Guia 2 SocialesDocumento3 páginasPoblacion Colombiana 8 Guia 2 Socialesdevanis cinchillaAún no hay calificaciones
- GUÍA QUÍMICA 10 GUIA No 02Documento11 páginasGUÍA QUÍMICA 10 GUIA No 02Deyanirth Ibarra GuevaraAún no hay calificaciones
- Ejercicios WordDocumento2 páginasEjercicios WordJuan Miranda RamosAún no hay calificaciones
- El MaizDocumento2 páginasEl MaizedgarbbAún no hay calificaciones
- Clasificacion de La Enfermedades PulparesDocumento3 páginasClasificacion de La Enfermedades PulparesRosaalba TrinidadAún no hay calificaciones
- Directorio Medios de TransporteDocumento38 páginasDirectorio Medios de TransporteAlexandra FerreiraAún no hay calificaciones
- Los mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosDe EverandLos mágicos números del Doctor Matrix: Conviértete en un maestro de los númerosCalificación: 5 de 5 estrellas5/5 (2)
- Guía práctica para la refracción ocularDe EverandGuía práctica para la refracción ocularCalificación: 5 de 5 estrellas5/5 (2)
- Había una vez el átomo: O cómo los científicos imaginan lo invisibleDe EverandHabía una vez el átomo: O cómo los científicos imaginan lo invisibleCalificación: 5 de 5 estrellas5/5 (3)
- El Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalDe EverandEl Tao de la física: Una exploración de los paralelismos entre la física moderna y el misticismo orientalCalificación: 5 de 5 estrellas5/5 (3)
- Análisis estructural básico: Apuntes de claseDe EverandAnálisis estructural básico: Apuntes de claseCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Cálculo integral: Técnicas de integraciónDe EverandCálculo integral: Técnicas de integraciónCalificación: 4 de 5 estrellas4/5 (8)
- Química orgánica: ejercicios de aplicaciónDe EverandQuímica orgánica: ejercicios de aplicaciónCalificación: 5 de 5 estrellas5/5 (3)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Fundamentos de matemática: Introducción al nivel universitarioDe EverandFundamentos de matemática: Introducción al nivel universitarioCalificación: 3 de 5 estrellas3/5 (9)
- Análisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoDe EverandAnálisis estructural mediante el método de los elementos finitos. Introducción al comportamiento lineal elásticoCalificación: 4.5 de 5 estrellas4.5/5 (12)
- La Biblia de las Matemáticas RápidasDe EverandLa Biblia de las Matemáticas RápidasCalificación: 4.5 de 5 estrellas4.5/5 (19)
- Entrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.De EverandEntrelazamiento cuántico y sincronicidad. Campos de fuerza, no localidad, percepciones extrasensoriales. Las sorprendentes propiedades de la física cuántica.Calificación: 4.5 de 5 estrellas4.5/5 (9)
- Electricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiDe EverandElectricidad: Fundamentos y problemas de electrostática, corriente continua, electromagnetiCalificación: 3.5 de 5 estrellas3.5/5 (5)
- La Guía Definitiva en Matemáticas para el Ingreso a la UniversidadDe EverandLa Guía Definitiva en Matemáticas para el Ingreso a la UniversidadCalificación: 4 de 5 estrellas4/5 (11)
- Mi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaDe EverandMi proyecto escolar Matemáticas Lúdicas: Adaptaciones curriculares para preescolar, primaria y secundariaCalificación: 5 de 5 estrellas5/5 (5)
- Los gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesDe EverandLos gatos sueñan con física cuántica y los perros con universos paralelos: Mecánica cuántica para todas las edadesCalificación: 4.5 de 5 estrellas4.5/5 (18)
- La magia de los números: 136 recreaciones aritméticas y geométricasDe EverandLa magia de los números: 136 recreaciones aritméticas y geométricasCalificación: 1 de 5 estrellas1/5 (1)
- La teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaDe EverandLa teoría de casi todo: El modelo estándar, triunfo no reconocido de la física modernaCalificación: 4 de 5 estrellas4/5 (32)





















































































































![Diseño de Experimentos [Métodos y Aplicaciones]](https://imgv2-1-f.scribdassets.com/img/word_document/436271314/149x198/596c96deb2/1654336147?v=1)







