También podría gustarte
- Formulario Revision de CFGDocumento2 páginasFormulario Revision de CFGKisairy RomanAún no hay calificaciones
- 1tarea 6 Seminario de Matematica y FisicaDocumento3 páginas1tarea 6 Seminario de Matematica y FisicaKisairy RomanAún no hay calificaciones
- 2 TareaDocumento7 páginas2 TareaKisairy RomanAún no hay calificaciones
- Punto 23Documento4 páginasPunto 23Kisairy RomanAún no hay calificaciones
- Tarea 2 Fisica 2Documento8 páginasTarea 2 Fisica 2Kisairy RomanAún no hay calificaciones
- PlanificacionesDocumento29 páginasPlanificacionesKisairy RomanAún no hay calificaciones
- Tarea 2 Fisica 2Documento8 páginasTarea 2 Fisica 2Kisairy RomanAún no hay calificaciones
- Tarea 2 de Fisica LL y Su LaboratorioDocumento10 páginasTarea 2 de Fisica LL y Su LaboratorioKisairy RomanAún no hay calificaciones
- Donde El Talento Acude para Crecer: Descubre MásDocumento5 páginasDonde El Talento Acude para Crecer: Descubre MásKisairy RomanAún no hay calificaciones
- Ejercicio Sobre TermodinamicaDocumento2 páginasEjercicio Sobre TermodinamicaKisairy RomanAún no hay calificaciones
- Tarea 2 de PracticaDocumento6 páginasTarea 2 de PracticaKisairy RomanAún no hay calificaciones
- Desarrollo Geodatabase Urbana Ortega TolimaDocumento11 páginasDesarrollo Geodatabase Urbana Ortega TolimaJUAN DIEGO GOMEZ RAMIREZAún no hay calificaciones
- 23.2 Óptica (Refracción)Documento9 páginas23.2 Óptica (Refracción)Carlos H ChAún no hay calificaciones
- Ley de CoulombDocumento4 páginasLey de CoulombDaniela FernandezAún no hay calificaciones
- Arrhenius Original y Reparametrizada Ejercicio 1Documento2 páginasArrhenius Original y Reparametrizada Ejercicio 1Cesar HernandezAún no hay calificaciones
- TEODOLITODocumento14 páginasTEODOLITOGalo ChoqueAún no hay calificaciones
- ProyectoDocumento28 páginasProyectoZhair Lazo GodoyAún no hay calificaciones
- PROCEDIMIENTO-Maniobras de Izaje Camion PlumaDocumento18 páginasPROCEDIMIENTO-Maniobras de Izaje Camion PlumaValdez NGAún no hay calificaciones
- Práctica 5 Cálculos Tabulacion de Lab de Física 3Documento1 páginaPráctica 5 Cálculos Tabulacion de Lab de Física 3Vanesa DeysiAún no hay calificaciones
- Ensayos en SoldaduraDocumento23 páginasEnsayos en SoldadurabrayanAún no hay calificaciones
- 1.matriz de PeligrosDocumento6 páginas1.matriz de PeligrosNikoll SotoAún no hay calificaciones
- Orificios Producidos Por Arma de FuegoDocumento17 páginasOrificios Producidos Por Arma de FuegoPedro BlancasAún no hay calificaciones
- Lab#3 DiodoZenerDocumento14 páginasLab#3 DiodoZenerkevin pabonAún no hay calificaciones
- Balance de Materia y EnergíaDocumento8 páginasBalance de Materia y EnergíaJose Gerardo Ramirez MartinezAún no hay calificaciones
- Hombres y Mujeres Que Aportaron Al Desarrollo Histórico de La Trigonometría Equipo #3Documento14 páginasHombres y Mujeres Que Aportaron Al Desarrollo Histórico de La Trigonometría Equipo #3Oscar Peña100% (4)
- 1ie132 Lmfi B Lab7 RL, Yl, JS PDFDocumento7 páginas1ie132 Lmfi B Lab7 RL, Yl, JS PDFRogelio Javier LoganAún no hay calificaciones
- 3-2. Dosificación Método FAURYDocumento26 páginas3-2. Dosificación Método FAURYRonie GutierrezAún no hay calificaciones
- Cap04 Tub Serie ParaleloDocumento41 páginasCap04 Tub Serie ParaleloEliseo Llimpe CañariAún no hay calificaciones
- Introducción A La PsicomotricidadDocumento39 páginasIntroducción A La PsicomotricidadLucero Auriestela Rivera HernandezAún no hay calificaciones
- Chuquisala Byron Trabajo Titulacion Estructuras Diciembre 2016Documento73 páginasChuquisala Byron Trabajo Titulacion Estructuras Diciembre 2016Oscar LeonAún no hay calificaciones
- Evaluacion 2-4 5B 2020-2Documento3 páginasEvaluacion 2-4 5B 2020-2Juseabh Krosby Sotomayor GarciaAún no hay calificaciones
- Medidas Con SignoDocumento7 páginasMedidas Con SignoAdal ZaidAún no hay calificaciones
- Informe BalísitcaDocumento22 páginasInforme BalísitcaSebástian RamirezAún no hay calificaciones
- Roadfocus Led Philips RFM G2Documento6 páginasRoadfocus Led Philips RFM G2greengee36Aún no hay calificaciones
- Resistencia de Materiales 1A: Facultad de Ciencias E Ingeniería Departamento de Ingeniería IndustrialDocumento42 páginasResistencia de Materiales 1A: Facultad de Ciencias E Ingeniería Departamento de Ingeniería IndustrialNAGHELY KERHEN MELO CASTROAún no hay calificaciones
- Practica 1 - EquipoGDocumento12 páginasPractica 1 - EquipoGFELIPE CCAún no hay calificaciones
- Dinámica-Unidad I y IIDocumento46 páginasDinámica-Unidad I y IIRodrigo AguilarAún no hay calificaciones
- Evr Manual Entec PDFDocumento29 páginasEvr Manual Entec PDFgabrielAún no hay calificaciones
- Examen 2 Física II Primavera 2022Documento2 páginasExamen 2 Física II Primavera 2022JuanmaSalgadoAún no hay calificaciones
- Actividad 1. Números ComplejosDocumento5 páginasActividad 1. Números ComplejosJair SánchezAún no hay calificaciones
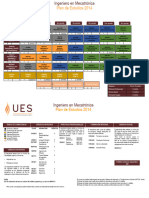
- 0361im Malla Curricular Plan 2014Documento2 páginas0361im Malla Curricular Plan 2014Jose rodolfo Zayas borbonAún no hay calificaciones