También podría gustarte
- Avionica y Sistemas de NavegaciónDocumento39 páginasAvionica y Sistemas de NavegaciónOmar CastellónAún no hay calificaciones
- Investigacion 1Documento11 páginasInvestigacion 1CaŔlo AndreAún no hay calificaciones
- MaterialesDocumento13 páginasMaterialesCaŔlo AndreAún no hay calificaciones
- Cuestionario Electronica 5toDocumento8 páginasCuestionario Electronica 5toCaŔlo AndreAún no hay calificaciones
- Avionica y Sistemas de NavegaciónDocumento39 páginasAvionica y Sistemas de NavegaciónOmar CastellónAún no hay calificaciones
- Acelerometros Fabricantes y Modelos Mas UsadosDocumento9 páginasAcelerometros Fabricantes y Modelos Mas UsadosCaŔlo AndreAún no hay calificaciones
- 01 EditorialDocumento4 páginas01 EditorialFlor LandoniAún no hay calificaciones
- CIDSDocumento1 páginaCIDSCaŔlo AndreAún no hay calificaciones
- Un Metodo PeligrosoDocumento5 páginasUn Metodo PeligrosoCaŔlo AndreAún no hay calificaciones
- MaterialesDocumento11 páginasMaterialesCaŔlo AndreAún no hay calificaciones
- Formulario 2016Documento24 páginasFormulario 2016OskarGuerreroAún no hay calificaciones
- Ec Dif 2Documento2 páginasEc Dif 2CaŔlo AndreAún no hay calificaciones
- AlimientosDocumento2 páginasAlimientosCaŔlo AndreAún no hay calificaciones
- datos-técnicos-aviónDocumento18 páginasdatos-técnicos-aviónCaŔlo Andre100% (1)
- Memoria PDFDocumento143 páginasMemoria PDFFernandoAún no hay calificaciones
- AlimientosDocumento2 páginasAlimientosCaŔlo AndreAún no hay calificaciones
- Apuntes Sistemas DigitalesDocumento11 páginasApuntes Sistemas DigitalesCaŔlo AndreAún no hay calificaciones
- Practica 5 MicrocontroladoresDocumento8 páginasPractica 5 MicrocontroladoresCaŔlo AndreAún no hay calificaciones
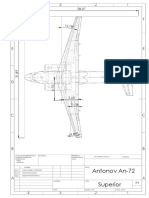
- Planos Antonov 72Documento3 páginasPlanos Antonov 72CaŔlo AndreAún no hay calificaciones
- Pieza 0000006563425 PDFDocumento3 páginasPieza 0000006563425 PDFCaŔlo AndreAún no hay calificaciones
- Antecedentes de La GlobalizaciónDocumento13 páginasAntecedentes de La GlobalizaciónCaŔlo AndreAún no hay calificaciones
- Pieza 0000006698660 PDFDocumento3 páginasPieza 0000006698660 PDFCaŔlo AndreAún no hay calificaciones
- Graficas 1-10Documento52 páginasGraficas 1-10CaŔlo AndreAún no hay calificaciones
- Pieza 0000006563422 PDFDocumento3 páginasPieza 0000006563422 PDFCaŔlo AndreAún no hay calificaciones
- Carro Esparcidor de Semillas AutomáticoDocumento13 páginasCarro Esparcidor de Semillas AutomáticoCaŔlo AndreAún no hay calificaciones
- Encuesta Equipo 5 1er TareaDocumento23 páginasEncuesta Equipo 5 1er TareaCaŔlo AndreAún no hay calificaciones
- Pieza 0000006527097 PDFDocumento3 páginasPieza 0000006527097 PDFCaŔlo AndreAún no hay calificaciones
- Graficas 1-10Documento52 páginasGraficas 1-10CaŔlo AndreAún no hay calificaciones
- Graficas 1-10Documento52 páginasGraficas 1-10CaŔlo AndreAún no hay calificaciones
- A320 Ata 23 Trabajo TraducidoDocumento63 páginasA320 Ata 23 Trabajo TraducidoANDRES HAVIT PEREZ GARZONAún no hay calificaciones
- Practica 4 AvionicaDocumento11 páginasPractica 4 AvionicaVALERIA BELEN MERIDA REVILLAAún no hay calificaciones
- ECAMDocumento10 páginasECAMandrewnaskar1Aún no hay calificaciones
- ARINC 664-708: Estándares clave para la comunicación y radar meteorológico en aviónicaDocumento39 páginasARINC 664-708: Estándares clave para la comunicación y radar meteorológico en aviónicaAlex PomaAún no hay calificaciones
- Ata 23Documento43 páginasAta 23Liidy Geral PerezgAún no hay calificaciones
- ARINCDocumento2 páginasARINCAlex Z. AljetAún no hay calificaciones
- 6.estructura Basica de Un OrdenadorDocumento27 páginas6.estructura Basica de Un OrdenadorEnrique Rubio FernándezAún no hay calificaciones
- 4B.Arinc 429Documento18 páginas4B.Arinc 429Enrique Rubio FernándezAún no hay calificaciones
- Airbus A-319,320,321 ATA 7X. Motor CFM56-5A,-5B PDFDocumento290 páginasAirbus A-319,320,321 ATA 7X. Motor CFM56-5A,-5B PDFjavier143088% (8)
- Arinc 629.en - EsDocumento5 páginasArinc 629.en - EsRonny VirhuezAún no hay calificaciones
- Laboratorio 5 - Sistema de Navegación Inercial de Aeronaves7.Documento8 páginasLaboratorio 5 - Sistema de Navegación Inercial de Aeronaves7.Bruce Landa IIAún no hay calificaciones
- RVDTDocumento8 páginasRVDTRicardo ArriagaAún no hay calificaciones
- Arinc Hector Apaza AvionicaDocumento19 páginasArinc Hector Apaza Avionicavevo1493100% (1)
- Sistm BussDocumento14 páginasSistm BussJuan Rz MamaniAún no hay calificaciones
- ARINC 429 (Español New Logo)Documento26 páginasARINC 429 (Español New Logo)oscar100% (3)
- Arinc 429Documento4 páginasArinc 429natividad2013Aún no hay calificaciones
- CPT 99Documento180 páginasCPT 99andres giovanny cardona gonzalezAún no hay calificaciones
- Falla VORDocumento5 páginasFalla VORGiovany DamiánAún no hay calificaciones
- Microprocesadores en AvionicaDocumento13 páginasMicroprocesadores en AvionicaLuisAún no hay calificaciones
- Informe Nº2 - Radionavegación II - PadrónDocumento19 páginasInforme Nº2 - Radionavegación II - PadrónRamses Exequiel Padron GentileAún no hay calificaciones
- Sistemas de Mantenimiento A BordoDocumento10 páginasSistemas de Mantenimiento A BordoVSMAXAún no hay calificaciones
- Simulador ARINC 429Documento75 páginasSimulador ARINC 429Julio Eme-ErreAún no hay calificaciones
- ArincDocumento3 páginasArinclizbeth m100% (1)
- NRC6793 - U1 - Ib03 - Remachefarez DannyDocumento9 páginasNRC6793 - U1 - Ib03 - Remachefarez DannyMICAELA VALENTINA GUTIERREZ MINDAAún no hay calificaciones
- AVIONICADocumento8 páginasAVIONICAFelipe TamayoAún no hay calificaciones
- ARINCDocumento7 páginasARINCledani100% (2)
- ARINC 429 Espanol New Logo PDFDocumento26 páginasARINC 429 Espanol New Logo PDFDahyana Uribe CortesAún no hay calificaciones
- 15J ImaDocumento44 páginas15J ImaEnrique Rubio FernándezAún no hay calificaciones
- Buses de DatosDocumento4 páginasBuses de DatosSebastian SarmientoAún no hay calificaciones
- Ata 45 Sistema de Mantenimiento A BordoDocumento24 páginasAta 45 Sistema de Mantenimiento A Bordomdaza_2000100% (1)