También podría gustarte
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaDe EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaAún no hay calificaciones
- Unidad 1 EstaticaDocumento13 páginasUnidad 1 EstaticaKenya ScarletteAún no hay calificaciones
- 07 Casos Hiperestáticos en TorsiónDocumento9 páginas07 Casos Hiperestáticos en Torsióncauca100% (1)
- Resumenes de Capitulos Libro Mecanica Vectorial para Ingenieros - CompressDocumento7 páginasResumenes de Capitulos Libro Mecanica Vectorial para Ingenieros - CompressLeidy UribeAún no hay calificaciones
- Aplicaciones de Vectores en La Física e IngenieríaDocumento30 páginasAplicaciones de Vectores en La Física e IngenieríaPlinio Alexis Yauri CastilloAún no hay calificaciones
- Trabajo de Matematica VectoresDocumento21 páginasTrabajo de Matematica Vectoresnato_libra29sAún no hay calificaciones
- Sistema de Encendido-ActuadoresDocumento7 páginasSistema de Encendido-ActuadoresLidia AlvarezAún no hay calificaciones
- Coetzee Auditoría de MantenimientoDocumento28 páginasCoetzee Auditoría de MantenimientoAv Joe CristianAún no hay calificaciones
- Ejercicios RuidoDocumento2 páginasEjercicios Ruidoluxogol64% (11)
- Introduccion de Estatica de Particulas, Fuerzas en Un Plano, EtcDocumento110 páginasIntroduccion de Estatica de Particulas, Fuerzas en Un Plano, EtcHuguiÑo W AcuÑaAún no hay calificaciones
- EstaticaDocumento13 páginasEstaticaCARLOS GLEZ. ANIMO COMPAÑEROS100% (3)
- ESTATICA de Una Particula CT UCEDocumento107 páginasESTATICA de Una Particula CT UCEAlexander CarrilloAún no hay calificaciones
- Cuadernillo de Fisica I EjemplosDocumento16 páginasCuadernillo de Fisica I EjemplosTrainHo199Aún no hay calificaciones
- Semana 1 TEO - Estatica de La ParticulaDocumento26 páginasSemana 1 TEO - Estatica de La Particulaoscar.achaAún no hay calificaciones
- Resumenes EstaticaDocumento30 páginasResumenes EstaticaFrancisco Javier Mata EstradaAún no hay calificaciones
- ALONSO MALLQUI, Harold.I (Introduccion A La Estática)Documento24 páginasALONSO MALLQUI, Harold.I (Introduccion A La Estática)kilder kenio Mallqui AguilarAún no hay calificaciones
- PROYECTODocumento6 páginasPROYECTOMagdiel Ivan Santos MontielAún no hay calificaciones
- EnsayoDocumento11 páginasEnsayoAlejandra Jiménez VelázquezAún no hay calificaciones
- Fuerzas Concurrentes Alas 1Documento38 páginasFuerzas Concurrentes Alas 1George Michel Mariñas AcevedoAún no hay calificaciones
- Tema 1Documento24 páginasTema 1Carlos CalatayudAún no hay calificaciones
- ENSAYO MECANICA - Herrera Cuahuizo Carlos UrielDocumento7 páginasENSAYO MECANICA - Herrera Cuahuizo Carlos Urieluriel cuahuizoAún no hay calificaciones
- Cinetica de ParticulasDocumento9 páginasCinetica de ParticulasTrans-xRojoAún no hay calificaciones
- Trabajo Final de EstaticaDocumento31 páginasTrabajo Final de Estaticaakira inoaAún no hay calificaciones
- Introducción a la mecánica vectorialDocumento21 páginasIntroducción a la mecánica vectorial1l2o3r4e5n6aAún no hay calificaciones
- Apuntes de Clase P - Nº01Documento95 páginasApuntes de Clase P - Nº01ArnieRiveraTiconaAún no hay calificaciones
- 7fuerzas en El Espacio-1-FisicaDocumento32 páginas7fuerzas en El Espacio-1-FisicaKristina WhiteAún no hay calificaciones
- Fuerzas en 3D: vectores y momentosDocumento33 páginasFuerzas en 3D: vectores y momentosLuis Bravo100% (1)
- 1.1 Fundamentos de La Estática y Su Relación Con La FuerzaDocumento4 páginas1.1 Fundamentos de La Estática y Su Relación Con La FuerzaJesus ContrerasAún no hay calificaciones
- ALGEBRA de Vectores PDFDocumento10 páginasALGEBRA de Vectores PDFCamilo JaimesAún no hay calificaciones
- Vector EsDocumento16 páginasVector EsBrigette carolina Parraga cedeñoAún no hay calificaciones
- Primera Tarea de Fisica 1 Tercer ParcialDocumento11 páginasPrimera Tarea de Fisica 1 Tercer ParcialMan MendozaAún no hay calificaciones
- Fuerzas en El PlanoDocumento20 páginasFuerzas en El PlanoGiordano ValecillosAún no hay calificaciones
- RESUMEN CAPITULO 1,2 y 3Documento7 páginasRESUMEN CAPITULO 1,2 y 3Alberto Jose Ventura DislaAún no hay calificaciones
- Introducción a la Estática y Sistemas Generales de FuerzasDocumento83 páginasIntroducción a la Estática y Sistemas Generales de FuerzasNayaritaOtianaPalominoMiraval100% (1)
- Unidad 1 Fase 2Documento21 páginasUnidad 1 Fase 2Jason Vargas MendozaAún no hay calificaciones
- VectoresDocumento62 páginasVectorescarlos100% (2)
- Cap 1 y 2Documento8 páginasCap 1 y 2rzarzozaAún no hay calificaciones
- Apuntes Estatica CivilDocumento96 páginasApuntes Estatica CivilGabriel Xolocotzi VásquezAún no hay calificaciones
- S01_s1 - Material Semana 01 - Generalidades, Vectores fuerzaDocumento34 páginasS01_s1 - Material Semana 01 - Generalidades, Vectores fuerzagamonalalexis465Aún no hay calificaciones
- Estatica VECTORESDocumento16 páginasEstatica VECTORESabishrivas123100% (1)
- Informe Fuerzas ConcurrentesDocumento11 páginasInforme Fuerzas ConcurrentesNaferMrtnzMAún no hay calificaciones
- Taller 'Estatica de ParticulasDocumento28 páginasTaller 'Estatica de ParticulasSteven Peñarete SotoAún no hay calificaciones
- 1.1. Identificación de Un Vector Posición.: UNIDAD 1. (Clase 2.) Estatica de ParticulasDocumento12 páginas1.1. Identificación de Un Vector Posición.: UNIDAD 1. (Clase 2.) Estatica de ParticulasPapi SexiAún no hay calificaciones
- Apuntes Estatica CivilDocumento98 páginasApuntes Estatica CivilJosueGomoraAún no hay calificaciones
- Exposición de EstaticaDocumento28 páginasExposición de Estaticakilder kenio Mallqui AguilarAún no hay calificaciones
- Fisica Unidad 2Documento7 páginasFisica Unidad 2Amaury Antonio Gonzalez CruzAún no hay calificaciones
- Unidad 2. Estática de PartículasDocumento72 páginasUnidad 2. Estática de PartículasHersson D AlemanAún no hay calificaciones
- Segunda ley de Newton: aceleración proporcional a fuerzaDocumento9 páginasSegunda ley de Newton: aceleración proporcional a fuerzaEsja ModaEsjaAún no hay calificaciones
- Tema 03. Estatica de ParticulasDocumento55 páginasTema 03. Estatica de ParticulasIsrael Ventura OjedaAún no hay calificaciones
- Estática y Vectores UniversidadDocumento17 páginasEstática y Vectores UniversidadWilliam Delgado SalazarAún no hay calificaciones
- Estatica de La Particula Conceptos BasicosDocumento39 páginasEstatica de La Particula Conceptos Basicostachidito-chivas617067% (9)
- Tarea 1.1Documento5 páginasTarea 1.1Maru ARQAún no hay calificaciones
- EstaticaDocumento76 páginasEstaticaCARLOS ALBERTO MENDEZ CAZARESAún no hay calificaciones
- TEMA 2 (Parte 2)Documento22 páginasTEMA 2 (Parte 2)Pablo SoriaAún no hay calificaciones
- ConceptosDocumento20 páginasConceptosAnonymous MQEQlDH9rQAún no hay calificaciones
- Apuntes Estatica CivilDocumento107 páginasApuntes Estatica CivilDaniel GutierrezAún no hay calificaciones
- Guía para el análisis y solución de problemas de resistencia de materialesDe EverandGuía para el análisis y solución de problemas de resistencia de materialesAún no hay calificaciones
- Introducción a la geometría analíticaDe EverandIntroducción a la geometría analíticaCalificación: 4 de 5 estrellas4/5 (1)
- Guía de Evaluación - Crítica Espacios ExterioresDocumento1 páginaGuía de Evaluación - Crítica Espacios Exterioresandreamaria_Aún no hay calificaciones
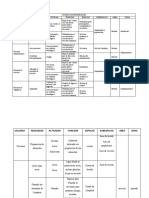
- Cuadro de NecesidadesDocumento3 páginasCuadro de Necesidadesandreamaria_Aún no hay calificaciones
- Problema de La Vivienda en America LatinaDocumento6 páginasProblema de La Vivienda en America Latinaandreamaria_Aún no hay calificaciones
- Informe Quincenal ObraDocumento10 páginasInforme Quincenal Obraandreamaria_Aún no hay calificaciones
- Regionalismo en El SalvadorDocumento28 páginasRegionalismo en El Salvadorandreamaria_Aún no hay calificaciones
- Linea de TiempoDocumento3 páginasLinea de Tiempoandreamaria_Aún no hay calificaciones
- San MiguelDocumento29 páginasSan Miguelandreamaria_Aún no hay calificaciones
- Viviendas de interés social en El SalvadorDocumento3 páginasViviendas de interés social en El Salvadorandreamaria_Aún no hay calificaciones
- Casa de Retiros EspiritualesDocumento10 páginasCasa de Retiros Espiritualesandreamaria_Aún no hay calificaciones
- Leyes de NewtonDocumento4 páginasLeyes de NewtonCarlos VásquezAún no hay calificaciones
- Presentacion ComuDocumento8 páginasPresentacion Comuandreamaria_Aún no hay calificaciones
- Ruta Al DesarrolloDocumento109 páginasRuta Al Desarrolloandreamaria_Aún no hay calificaciones
- Unidad 1 CorregidaDocumento140 páginasUnidad 1 CorregidaChristian Sandokan de Larriva0% (1)
- Divisores Capacitivos de Potencia y Transformadores OpticosDocumento8 páginasDivisores Capacitivos de Potencia y Transformadores Opticosjohanna inchontaAún no hay calificaciones
- Red de Baja TensiónDocumento43 páginasRed de Baja TensiónAna EsparzaAún no hay calificaciones
- Que Sabemos Del Sonido para Sexto de PrimariaDocumento5 páginasQue Sabemos Del Sonido para Sexto de PrimariaKevin KingAún no hay calificaciones
- Definición de Sistemas de Referencia InercialDocumento3 páginasDefinición de Sistemas de Referencia InercialDulce Maria Guazo DiazAún no hay calificaciones
- TAREA1Documento14 páginasTAREA1Juan Carlos YurritaAún no hay calificaciones
- Tipeo Cajamarca Jueves 2.37Documento14 páginasTipeo Cajamarca Jueves 2.37Kattery Leticia Cabrera CordovaAún no hay calificaciones
- Lingua Latina Pars II Roma Aeterna PDFDocumento1 páginaLingua Latina Pars II Roma Aeterna PDFGabinete GioiaAún no hay calificaciones
- 01 Uniones Remachadas Roblonadas SoldadasDocumento104 páginas01 Uniones Remachadas Roblonadas SoldadasGT GuidoAún no hay calificaciones
- MEC314Documento6 páginasMEC314MiltonAún no hay calificaciones
- LibroDocumento14 páginasLibroyordy julcahuancaAún no hay calificaciones
- Diseño de Reactores No Isotérmicos en Estado Estacionario (Final)Documento8 páginasDiseño de Reactores No Isotérmicos en Estado Estacionario (Final)María fernanda Sierra muskusAún no hay calificaciones
- PET220 - BOMBEO MECANICO vs4Documento107 páginasPET220 - BOMBEO MECANICO vs4Genedyen GarciaAún no hay calificaciones
- Fluidos, Bombas e Instalaciones Hidráulicas (S. de Las Heras)Documento415 páginasFluidos, Bombas e Instalaciones Hidráulicas (S. de Las Heras)leonardo_arévalo_2891% (11)
- Nanna o Acerca de La Vida Espiritual de Las Plantas - Castellano-Gustav Theodor FechnerDocumento196 páginasNanna o Acerca de La Vida Espiritual de Las Plantas - Castellano-Gustav Theodor Fechnergabriel brias buendiaAún no hay calificaciones
- Apuntes de Analicis Estructural AvanzadoDocumento20 páginasApuntes de Analicis Estructural AvanzadoJose Luis Torress MerinooAún no hay calificaciones
- Calorimetría y transferencia del calorDocumento30 páginasCalorimetría y transferencia del calorLeidy RamirezAún no hay calificaciones
- Ensayo Peso EspecificoDocumento17 páginasEnsayo Peso EspecificoAriazEdyAún no hay calificaciones
- Estructura AtómicaDocumento3 páginasEstructura AtómicaArilucariAún no hay calificaciones
- Segundas EcuaDocumento18 páginasSegundas EcuaEduardo Villacorta CasmaAún no hay calificaciones
- Explique Los Fenómenos Que Causan Los Movimientos de Rotación y TraslaciónDocumento3 páginasExplique Los Fenómenos Que Causan Los Movimientos de Rotación y TraslaciónRuber PerezAún no hay calificaciones
- Foro PDFDocumento10 páginasForo PDFDiegopa RubianoAún no hay calificaciones
- 4.3 Analisis Analitico y Grafico de Levas PlanasDocumento6 páginas4.3 Analisis Analitico y Grafico de Levas Planasalexander velazcoAún no hay calificaciones
- Diseño de Intercambiador de Coraza-TuboDocumento31 páginasDiseño de Intercambiador de Coraza-Tuboaquiros29100% (1)
- Actividades Previas (Cohetes Secundaria) PDFDocumento7 páginasActividades Previas (Cohetes Secundaria) PDFCicy M. OrtegaAún no hay calificaciones
- Sistema de enfriamiento para autos compactos mediante celdas peltierDocumento11 páginasSistema de enfriamiento para autos compactos mediante celdas peltierEdwin MillanAún no hay calificaciones