También podría gustarte
- ROBODKDocumento4 páginasROBODKFernando PatricioAún no hay calificaciones
- 4 ED Programación de SubrutinasDocumento9 páginas4 ED Programación de SubrutinasAlfredo Manuel Romo CruzAún no hay calificaciones
- ADC Con Pico-BlazeDocumento13 páginasADC Con Pico-BlazeIvan RomoAún no hay calificaciones
- Simuladores de Robots - Jhannifer FDocumento10 páginasSimuladores de Robots - Jhannifer FJhannifer100% (1)
- Robotica MecanismosDocumento7 páginasRobotica MecanismosMarcl Andrs SampdroAún no hay calificaciones
- Práctica Calificada 03 Cinemática y Dinámica de RobotsDocumento22 páginasPráctica Calificada 03 Cinemática y Dinámica de RobotsdanloeyAún no hay calificaciones
- Diseño de Robot Velocista de CompetenciaDocumento4 páginasDiseño de Robot Velocista de CompetenciaAlex Alvarez HuillcaAún no hay calificaciones
- Práctica 3Documento12 páginasPráctica 3German MeraAún no hay calificaciones
- Manual de Practicas ATMega 8535Documento61 páginasManual de Practicas ATMega 8535JUAN DIAZ MAMANIAún no hay calificaciones
- Guia 6Documento24 páginasGuia 6bookskskAún no hay calificaciones
- Analisis de Un Robot Manipulador Scara ARTICULODocumento22 páginasAnalisis de Un Robot Manipulador Scara ARTICULOcarlos.otiniano9811Aún no hay calificaciones
- Laboratorio 2 RoboticaDocumento6 páginasLaboratorio 2 RoboticaFrankoAún no hay calificaciones
- Semaforo Pic 18f4550Documento7 páginasSemaforo Pic 18f4550JaVier SkalonaAún no hay calificaciones
- Cinemática Inversa Del Robot Puma 560 Usando La Librería ADocumento8 páginasCinemática Inversa Del Robot Puma 560 Usando La Librería ADexter ThompsonAún no hay calificaciones
- Manual de Programacion - Brazo Manipulador C-5Documento14 páginasManual de Programacion - Brazo Manipulador C-5destino29Aún no hay calificaciones
- Comunicación Inalámbrica Con Módulos de RF de 433mhzDocumento16 páginasComunicación Inalámbrica Con Módulos de RF de 433mhzankasi rey hhAún no hay calificaciones
- PRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionDocumento24 páginasPRACTICA #1 DE ROBÓTICA - Transformaciones Espaciales y Matriz de RotacionJerry Rodriguez FloresAún no hay calificaciones
- Guias Robotica 2Documento16 páginasGuias Robotica 2Michael DavidAún no hay calificaciones
- Informe de Lab Oratorio Radio MobileDocumento6 páginasInforme de Lab Oratorio Radio MobileOscar J RamirezAún no hay calificaciones
- Algoritmo de Denavit-HartenbergDocumento8 páginasAlgoritmo de Denavit-Hartenberghugoadrian quispebolivarAún no hay calificaciones
- Seguidor de LuzDocumento11 páginasSeguidor de LuzAlex Jimenez0% (1)
- PracticasdeAnalogica 2018Documento111 páginasPracticasdeAnalogica 2018Gabriel HinostrozaAún no hay calificaciones
- Detector de MinasDocumento49 páginasDetector de MinasGerman MeraAún no hay calificaciones
- Robot de Sumo IEEEDocumento6 páginasRobot de Sumo IEEEapi-3745477100% (2)
- Dinamica Del RobotDocumento50 páginasDinamica Del RobotAlonso Limon100% (1)
- Toolbox MatlabDocumento8 páginasToolbox MatlabSergio SorucoAún no hay calificaciones
- 1 - SPLD y CPLDDocumento90 páginas1 - SPLD y CPLDpalmerosd100% (1)
- Practica#7Documento10 páginasPractica#7Alexiz CuAún no hay calificaciones
- Programar PIC 18FDocumento42 páginasProgramar PIC 18Fjuanpablolasserre100% (1)
- Previo 2 Circuitos DigitalesDocumento9 páginasPrevio 2 Circuitos DigitalesLuis Angel Zapata ChungaAún no hay calificaciones
- Trabajos y Aplicaciones Educativas de Myopenlab y ArduinoDocumento0 páginasTrabajos y Aplicaciones Educativas de Myopenlab y ArduinoEmilio QuinterosAún no hay calificaciones
- Dimmer Digital A Control RemotoDocumento11 páginasDimmer Digital A Control RemotoneogatsAún no hay calificaciones
- Lab 13 Control Monoarticular Realimentado PDFDocumento2 páginasLab 13 Control Monoarticular Realimentado PDFMarc LlAún no hay calificaciones
- Morfología Del RobotDocumento18 páginasMorfología Del RobotM Sc Marco Antonio Canchola100% (1)
- RRR InversaDocumento61 páginasRRR InversaVictor Navarrete PellacaniAún no hay calificaciones
- Practica 10 LABVIEW ENCENDER LEDDocumento8 páginasPractica 10 LABVIEW ENCENDER LEDIsrael Pastelin MoralesAún no hay calificaciones
- MatrizJacobiana 2020Documento46 páginasMatrizJacobiana 2020drake JonasAún no hay calificaciones
- Robótica - 4-Sistemas de Coordenadas PDFDocumento16 páginasRobótica - 4-Sistemas de Coordenadas PDFAlejandro CordobaAún no hay calificaciones
- Control de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Documento22 páginasControl de Velocidad Con LabVIEW y Arduino - Docx (RESUMIDO)Eugenio Puche SánchezAún no hay calificaciones
- Conexion CDC PIC LabViewDocumento15 páginasConexion CDC PIC LabViewJonatan Yam100% (1)
- Crear Un Proyecto en CosimirDocumento11 páginasCrear Un Proyecto en CosimirJose Luis Sovero Astoaman100% (1)
- Realizacion de Un Robot Minisumo Con Un Microprocesador 89c52Documento19 páginasRealizacion de Un Robot Minisumo Con Un Microprocesador 89c52Yeison A. Castaño100% (1)
- Fundamentos de Lenguaje C para PICsDocumento0 páginasFundamentos de Lenguaje C para PICssaulin1965Aún no hay calificaciones
- Examen MicroporcesadoresDocumento31 páginasExamen MicroporcesadoresGrizAún no hay calificaciones
- Práctica RobóticaDocumento11 páginasPráctica RobóticaRichi PérezAún no hay calificaciones
- Laboratorio 12Documento12 páginasLaboratorio 12Jose Luis Sovero AstoamanAún no hay calificaciones
- Control en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoDocumento29 páginasControl en Posicion de Un Servomotor CC Mediante Realimentacin Del EstadoMiguel DelgadoAún no hay calificaciones
- Tecnicas Programacion de Aplicaciones Eficientes en LabviewDocumento53 páginasTecnicas Programacion de Aplicaciones Eficientes en LabviewRocio Deidamia Puppi HerreraAún no hay calificaciones
- Comandando Variadores Sew Movidrive MDX61B A Través de DeviceNe1Documento16 páginasComandando Variadores Sew Movidrive MDX61B A Través de DeviceNe1Alberto CanteroAún no hay calificaciones
- Trabajo Robotstudio - MemoriaDocumento17 páginasTrabajo Robotstudio - MemoriaJavier LapuenteAún no hay calificaciones
- Paletizado Kuka KR16Documento13 páginasPaletizado Kuka KR16Andres AriasAún no hay calificaciones
- Lab 2Documento7 páginasLab 2Jesús ZuñigaAún no hay calificaciones
- Generación de Trayectorias Con Brazo RobotDocumento8 páginasGeneración de Trayectorias Con Brazo RobotAlexis AlvaradoAún no hay calificaciones
- Tesis Brazo RobóticoDocumento4 páginasTesis Brazo Robóticonelson100% (1)
- Monografia Construccion de Brazo RoboticoDocumento10 páginasMonografia Construccion de Brazo RoboticoCarlos Quispealaya LazoAún no hay calificaciones
- Ep DeaguiarrebazaDocumento6 páginasEp DeaguiarrebazaJosueFigueroaAún no hay calificaciones
- Reporte Proyecto Robot RR PDFDocumento24 páginasReporte Proyecto Robot RR PDFCarlitos TorresAún no hay calificaciones
- Robotica Proyecto FinalDocumento12 páginasRobotica Proyecto FinalLuisdaniel BallesterosseguraAún no hay calificaciones
- Tarea#1 - Parcial#2 - Robotica - Grupo 2Documento3 páginasTarea#1 - Parcial#2 - Robotica - Grupo 2Edwin TrochezAún no hay calificaciones
- Fase4 Grupo 299011 31Documento15 páginasFase4 Grupo 299011 31sindy Bermúdez Caballero100% (1)
- Laboratorio 3 PDFDocumento5 páginasLaboratorio 3 PDFYOSSEF ROJAS TAPARAAún no hay calificaciones
- Laboratorio 3 PDFDocumento5 páginasLaboratorio 3 PDFYOSSEF ROJAS TAPARAAún no hay calificaciones
- Manual Programacion ArduinoDocumento70 páginasManual Programacion Arduinofaasa83% (6)
- Mitos y LeyendasDocumento12 páginasMitos y LeyendasIdris BélangerAún no hay calificaciones
- PC1 2020-2 PDFDocumento3 páginasPC1 2020-2 PDFYOSSEF ROJAS TAPARAAún no hay calificaciones
- PC1 2020-2 PDFDocumento3 páginasPC1 2020-2 PDFYOSSEF ROJAS TAPARAAún no hay calificaciones
- PC1 2020-2 PDFDocumento3 páginasPC1 2020-2 PDFYOSSEF ROJAS TAPARAAún no hay calificaciones
- Programacion Radio TV Semana 23Documento6 páginasProgramacion Radio TV Semana 23Escuela José Gálvez Barrenechea Tarma100% (1)
- Caracterizticas Del Estado Peruano Luis MiguelDocumento7 páginasCaracterizticas Del Estado Peruano Luis MiguelYOSSEF ROJAS TAPARAAún no hay calificaciones
- Programacion Radio TV Semana 23Documento6 páginasProgramacion Radio TV Semana 23Escuela José Gálvez Barrenechea Tarma100% (1)
- La Primera y Segunda Revolución Industrial y Su Relacion Con Diversos AspectosDocumento8 páginasLa Primera y Segunda Revolución Industrial y Su Relacion Con Diversos AspectosGabriel CBAún no hay calificaciones
- De Quimica Resueltos Organica PDF Ejercicios ResonanciaDocumento10 páginasDe Quimica Resueltos Organica PDF Ejercicios ResonanciaGilberto Diaz CastilloAún no hay calificaciones
- Act. 3 Ept - MatemáticaDocumento6 páginasAct. 3 Ept - MatemáticaANGIE FIGUEROA100% (1)
- Texto ArgumentativoDocumento3 páginasTexto ArgumentativoAlejandra Herrera100% (1)
- COVID-19 Gattinoni Reflexión de Gattinoni Sobre El Manejo de Los Pacientes Con COVID PDFDocumento5 páginasCOVID-19 Gattinoni Reflexión de Gattinoni Sobre El Manejo de Los Pacientes Con COVID PDFPaulinaAún no hay calificaciones
- Premium: Cerraduras TubularDocumento2 páginasPremium: Cerraduras TubularGm FixoralAún no hay calificaciones
- PDF Titulacion y Valoraciondocx DL - PDFDocumento14 páginasPDF Titulacion y Valoraciondocx DL - PDFRicardo PerugachiAún no hay calificaciones
- Catálogo de CompetenciasDocumento39 páginasCatálogo de CompetenciasDiana MendozaAún no hay calificaciones
- MATEMATICaDocumento6 páginasMATEMATICafran_gonzalez_difeAún no hay calificaciones
- 3 Variable ComplejaDocumento43 páginas3 Variable ComplejaLlerson Bustos VegaAún no hay calificaciones
- Capítulo 47 Fisiología Guyton y Hall 14 Ed.Documento9 páginasCapítulo 47 Fisiología Guyton y Hall 14 Ed.Manuela MenendezAún no hay calificaciones
- Workshopsp Module1Documento6 páginasWorkshopsp Module1JennAún no hay calificaciones
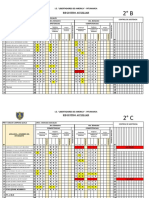
- Registro Auxiliar 2022Documento10 páginasRegistro Auxiliar 2022Carlos CampanaAún no hay calificaciones
- 7 MagnetismoDocumento14 páginas7 MagnetismoCarlos NavaAún no hay calificaciones
- Examen Trimestral Sexto Bloque2 2021 2022Documento15 páginasExamen Trimestral Sexto Bloque2 2021 2022Jose Domingo Garcia PérezAún no hay calificaciones
- TFG 2017 HerreraGorrizAna-1Documento18 páginasTFG 2017 HerreraGorrizAna-1Electrotecnia EE-C1Aún no hay calificaciones
- Precios ISem 2020 v2Documento10 páginasPrecios ISem 2020 v2AngelloveraAún no hay calificaciones
- Checklist DiferencialDocumento26 páginasChecklist DiferencialAdrian TuyubAún no hay calificaciones
- Matriz de Impactos AmbientalesDocumento11 páginasMatriz de Impactos AmbientalesDavid Romero FerreiraAún no hay calificaciones
- Sikafloor 20 NDocumento8 páginasSikafloor 20 NGuido Lucas BaltazarAún no hay calificaciones
- 06-Muro de Gravedad Estribo Tipo RodilloDocumento7 páginas06-Muro de Gravedad Estribo Tipo RodilloAlonso Mario Laura PaniaguaAún no hay calificaciones
- Principales Leyes Lógicas o TautológicasDocumento2 páginasPrincipales Leyes Lógicas o TautológicasAlexandro Ramos Rodríguez100% (1)
- EJEMPLPO Carta FelicitacionesDocumento1 páginaEJEMPLPO Carta FelicitacionesCristian Vera MonsalvezAún no hay calificaciones
- Sesion Ingles Alrededor Del MundoDocumento2 páginasSesion Ingles Alrededor Del MundoSaul MalkiAún no hay calificaciones
- Elementos de Entradas Del Plan de CalidadDocumento3 páginasElementos de Entradas Del Plan de CalidadHEYDER DAVID SOJO BARRANZUELAAún no hay calificaciones
- Certificado Anual de Estudios: Enseñanza BásicaDocumento2 páginasCertificado Anual de Estudios: Enseñanza BásicaNastyPlayerAún no hay calificaciones
- EsquemaDocumento8 páginasEsquemaisabeln75Aún no hay calificaciones
- Avaricia - Raul Garbantes-HolaebookDocumento65 páginasAvaricia - Raul Garbantes-HolaebookLuis GimenezAún no hay calificaciones
- Informe Grupal Topografía - Calibrar InstrumentosDocumento10 páginasInforme Grupal Topografía - Calibrar InstrumentosMiguel Ángel Reyes MontoyaAún no hay calificaciones
- Tablas de MultiplicarDocumento9 páginasTablas de MultiplicarkatheAún no hay calificaciones
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaDe EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaCalificación: 4.5 de 5 estrellas4.5/5 (117)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másCalificación: 2.5 de 5 estrellas2.5/5 (3)
- Influencia. La psicología de la persuasiónDe EverandInfluencia. La psicología de la persuasiónCalificación: 4.5 de 5 estrellas4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe Everand7 tendencias digitales que cambiarán el mundoCalificación: 4.5 de 5 estrellas4.5/5 (87)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadCalificación: 5 de 5 estrellas5/5 (1)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteCalificación: 1 de 5 estrellas1/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónCalificación: 5 de 5 estrellas5/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDe EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosCalificación: 4 de 5 estrellas4/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Calificación: 4 de 5 estrellas4/5 (51)
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaCalificación: 5 de 5 estrellas5/5 (1)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaCalificación: 3.5 de 5 estrellas3.5/5 (2)
- Excel 2021 y 365 Paso a Paso: Paso a PasoDe EverandExcel 2021 y 365 Paso a Paso: Paso a PasoCalificación: 5 de 5 estrellas5/5 (12)
- Todo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainDe EverandTodo Sobre Tecnología Blockchain: La Guía Definitiva Para Principiantes Sobre Monederos BlockchainAún no hay calificaciones
- Comunicaciones industriales y WinCCDe EverandComunicaciones industriales y WinCCCalificación: 5 de 5 estrellas5/5 (4)
- Lógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosDe EverandLógica de programación: Solucionario en pseudocódigo – Ejercicios resueltosCalificación: 3.5 de 5 estrellas3.5/5 (7)
- Manual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasDe EverandManual Técnico del Automóvil - Diccionario Ilustrado de las Nuevas TecnologíasCalificación: 4.5 de 5 estrellas4.5/5 (14)
- La psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.De EverandLa psicología del trading de una forma sencilla: Cómo aplicar las estrategias psicológicas y las actitudes de los comerciantes ganadores para operar con éxito en línea.Calificación: 4.5 de 5 estrellas4.5/5 (3)
- 100 circuitos de shields para arduino (español)De Everand100 circuitos de shields para arduino (español)Calificación: 3.5 de 5 estrellas3.5/5 (3)
- La Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?De EverandLa Vida Útil de los Alimentos y sus Principales Reacciones: ¿Qué pasa en los alimentos con el tiempo?Calificación: 2 de 5 estrellas2/5 (1)
- LAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.De EverandLAS VELAS JAPONESAS DE UNA FORMA SENCILLA. La guía de introducción a las velas japonesas y a las estrategias de análisis técnico más eficaces.Calificación: 4.5 de 5 estrellas4.5/5 (54)
- Inteligencia artificial: Análisis de datos e innovación para principiantesDe EverandInteligencia artificial: Análisis de datos e innovación para principiantesCalificación: 4 de 5 estrellas4/5 (3)
- Perforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosDe EverandPerforación con tubería de revestimiento en la construcción del hoyo superficial en campos petrolerosCalificación: 5 de 5 estrellas5/5 (3)
- El mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosDe EverandEl mito de la inteligencia artificial: Por qué las máquinas no pueden pensar como nosotros lo hacemosCalificación: 5 de 5 estrellas5/5 (2)