También podría gustarte
- s5.2 - PPT - Sistema de Ecuaciones LinealesDocumento24 páginass5.2 - PPT - Sistema de Ecuaciones LinealesBlanca CahuanaAún no hay calificaciones
- Como Hacer Una Hoja de VidaDocumento3 páginasComo Hacer Una Hoja de VidaJairo Luis Ribon RamosAún no hay calificaciones
- Planteamiento Del ProblemaDocumento4 páginasPlanteamiento Del ProblemaKeila IbarraAún no hay calificaciones
- Problema de Transporte Costo MinimoDocumento20 páginasProblema de Transporte Costo MinimoMiguedorAún no hay calificaciones
- Plan de Negocio de Crematorio de Mascotas PDFDocumento161 páginasPlan de Negocio de Crematorio de Mascotas PDFTeo Donaires100% (1)
- 6 Colmena Tecnicas ParticipativasDocumento48 páginas6 Colmena Tecnicas ParticipativasAndrew ColomaAún no hay calificaciones
- Módulo 7 PDFDocumento37 páginasMódulo 7 PDFelbrother 1810dsdcAún no hay calificaciones
- Sistema de Ecuaciones LinealesDocumento13 páginasSistema de Ecuaciones LinealesItzel Nataly Villanueva GamaAún no hay calificaciones
- s10 - PPT - Sistemas de Ecuaciones LinealesDocumento32 páginass10 - PPT - Sistemas de Ecuaciones LinealesyarelizAún no hay calificaciones
- Sistema de Ecu. - S1 PDFDocumento30 páginasSistema de Ecu. - S1 PDFRocio VillaAún no hay calificaciones
- Sesion 04 - Sistema de Ecuaciones LinealesDocumento18 páginasSesion 04 - Sistema de Ecuaciones LinealesGeison AlexanderAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento23 páginasSistemas de Ecuaciones LinealesHans Camus EstradaAún no hay calificaciones
- 8-Sistemas LinealesDocumento20 páginas8-Sistemas Linealesricardo zapataAún no hay calificaciones
- 1.6-1.8 Sistemas de Ecuaciones Lineales-SolucionesDocumento36 páginas1.6-1.8 Sistemas de Ecuaciones Lineales-SolucionesPaul Wladimir AlejandroAún no hay calificaciones
- Matematica IiDocumento39 páginasMatematica IiAlessandro NVAún no hay calificaciones
- Sistema de Ecuaciones, Autovalores, Autovectores y DiagonalizaciónDocumento47 páginasSistema de Ecuaciones, Autovalores, Autovectores y DiagonalizaciónDeyvi La Rosa OrtegaAún no hay calificaciones
- Metodo DirectoDocumento24 páginasMetodo DirectoRosmery Cristina Valeriano PozoAún no hay calificaciones
- Algebra Lineal 4Documento14 páginasAlgebra Lineal 4Yhen miller Conchucos amesAún no hay calificaciones
- Lectura 1 PDFDocumento26 páginasLectura 1 PDFluis enrique morel hernadezAún no hay calificaciones
- 19 B Algebra Sistemas de Ecuaciones LinealesDocumento35 páginas19 B Algebra Sistemas de Ecuaciones LinealesholaAún no hay calificaciones
- PPT14 Mat - AplicadaDocumento23 páginasPPT14 Mat - Aplicadajazmin atauquiAún no hay calificaciones
- Tipos de Sistemas de EcuacionesDocumento17 páginasTipos de Sistemas de Ecuacioneseder adrian cardona velaAún no hay calificaciones
- Sistema de Ecuaciones 5to. Power PointDocumento14 páginasSistema de Ecuaciones 5to. Power PointDaniel Vilcahuaman VicenteAún no hay calificaciones
- 4° CAPÍTULO - SISTEMAS DE ECUACIONES LINEALESDocumento33 páginas4° CAPÍTULO - SISTEMAS DE ECUACIONES LINEALESPablo RodriguezAún no hay calificaciones
- Clase 10-Sistemas de Ecuaciones LinealesDocumento26 páginasClase 10-Sistemas de Ecuaciones Linealeshigh fiveAún no hay calificaciones
- Complemento de Matemática: SESIÓN 10: Sistema de Ecuaciones LinealesDocumento26 páginasComplemento de Matemática: SESIÓN 10: Sistema de Ecuaciones LinealesRománRomaRomaRoncerosAún no hay calificaciones
- Reglas de CramerDocumento13 páginasReglas de CramerAndres CaleroAún no hay calificaciones
- S10 - Sistema de Ecuaciones LinealesDocumento26 páginasS10 - Sistema de Ecuaciones LinealesAngel Martin Zender SmithAún no hay calificaciones
- Matemática IDocumento27 páginasMatemática IELVER SOTO TANTALEANAún no hay calificaciones
- Sistemas de ecuaciones lineales resueltos mediante la regla de CramerDocumento27 páginasSistemas de ecuaciones lineales resueltos mediante la regla de CramerJose FernandezAún no hay calificaciones
- Clase 7Documento9 páginasClase 7Paul JHAún no hay calificaciones
- S04 - MPNDocumento36 páginasS04 - MPNDAYANA YAMELLE TAVARA SAN MARTINAún no hay calificaciones
- 3.-Sistemas de Ecuaciones LinealesDocumento23 páginas3.-Sistemas de Ecuaciones LinealesJose Hernandez PerezAún no hay calificaciones
- Guia Sistemas de EcuacionesDocumento23 páginasGuia Sistemas de EcuacionesChane XDAún no hay calificaciones
- Regla de CramerDocumento4 páginasRegla de Cramerandres cogolloAún no hay calificaciones
- Anual Uni-Algebra Semana 38Documento16 páginasAnual Uni-Algebra Semana 38Elizabeth Lucero Huanaco HuaytaAún no hay calificaciones
- D7 - 2020-2 - Ayg - Sel Interpretación Geométrica - Eliminacione GaussianaDocumento30 páginasD7 - 2020-2 - Ayg - Sel Interpretación Geométrica - Eliminacione GaussianaJęåń Ørtįz LAún no hay calificaciones
- Guía de MatematicasDocumento16 páginasGuía de MatematicasLuis Manuel Serrano AndradeAún no hay calificaciones
- Sistemas de Ecuaciones Lineales de Tres VariablesDocumento10 páginasSistemas de Ecuaciones Lineales de Tres VariablesAxel0% (1)
- Matrices: Facultad de Ciencias Departamento Académico de MatemáticaDocumento7 páginasMatrices: Facultad de Ciencias Departamento Académico de MatemáticaAna ChávezAún no hay calificaciones
- Sesion 4 24102020Documento60 páginasSesion 4 24102020DANNY MOISES GARCIA COREAAún no hay calificaciones
- Tema 8 Sistemas de EcuacionesDocumento4 páginasTema 8 Sistemas de EcuacionesValentin VallejosAún no hay calificaciones
- Claumon - TEORÍA REPASO SOLUCIÓN SISTEMAS DE ECUACIONES PDFDocumento2 páginasClaumon - TEORÍA REPASO SOLUCIÓN SISTEMAS DE ECUACIONES PDFDavid Gonzalez SotoAún no hay calificaciones
- Ppt02 Sel Comma-Ing.Documento28 páginasPpt02 Sel Comma-Ing.Emilio VidalesAún no hay calificaciones
- 1 Sistemas de Ecuaciones LinealesDocumento92 páginas1 Sistemas de Ecuaciones LinealesJavier RuizAún no hay calificaciones
- Segundo Parcial Con PropuestosDocumento86 páginasSegundo Parcial Con PropuestosOscar FonsecaAún no hay calificaciones
- Presentacion 3 Sistemas Ecuaciones Lineales de 3x3 y 4x4Documento52 páginasPresentacion 3 Sistemas Ecuaciones Lineales de 3x3 y 4x4Idriana pazAún no hay calificaciones
- Algebra y Modelos 3mDocumento34 páginasAlgebra y Modelos 3mAngelo StalinAún no hay calificaciones
- Sistemas de Ecuaciones Lineales. Metodo de Gauss-JordanDocumento5 páginasSistemas de Ecuaciones Lineales. Metodo de Gauss-JordanJose Cordova VallejoAún no hay calificaciones
- Notas - Matrices, SE y DeterminantesDocumento26 páginasNotas - Matrices, SE y DeterminantesDiego Ismael VargasAún no hay calificaciones
- Resumen 1 - Sistemas de Ecuaciones LinealesDocumento16 páginasResumen 1 - Sistemas de Ecuaciones LinealesCesar Martín PeñaAún no hay calificaciones
- Sistemas de ecuaciones lineales - Método de eliminación gaussiana y gauss-jordanDocumento6 páginasSistemas de ecuaciones lineales - Método de eliminación gaussiana y gauss-jordanMarco BuenoAún no hay calificaciones
- 4° Capítulo - Sistemas de Ecuaciones LinealesDocumento34 páginas4° Capítulo - Sistemas de Ecuaciones Linealesmacarena vanesa herediaAún no hay calificaciones
- Ecuaciones Lineales en El ItpDocumento6 páginasEcuaciones Lineales en El ItpFre DyAún no hay calificaciones
- Soluciones Del Cuestionario OnLine #3 - Sistemas de Ecuaciones LinealesDocumento9 páginasSoluciones Del Cuestionario OnLine #3 - Sistemas de Ecuaciones LinealesCarolina Ruiz0% (1)
- Gauus Con PivoteoDocumento24 páginasGauus Con Pivoteojose contrerasAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento3 páginasSistemas de Ecuaciones LinealesKiri KirinoAún no hay calificaciones
- Álgebra Lineal Semana 2 - OCDocumento23 páginasÁlgebra Lineal Semana 2 - OCEmiliano Ramiro RuizAún no hay calificaciones
- Sistema de Ecuaciones PDFDocumento6 páginasSistema de Ecuaciones PDFChristian VCAún no hay calificaciones
- 5to Sec Final - Sistema de Ecuaciones LinealesDocumento34 páginas5to Sec Final - Sistema de Ecuaciones LinealesHuber Rogger Marquina QuispeAún no hay calificaciones
- unidad2-sistemasdeecuacionesDocumento41 páginasunidad2-sistemasdeecuacionesfannyAún no hay calificaciones
- Introducción AutomatizaciónDocumento12 páginasIntroducción AutomatizaciónIngenieraPaolaAún no hay calificaciones
- Introducción AutomatizaciónDocumento12 páginasIntroducción AutomatizaciónIngenieraPaolaAún no hay calificaciones
- Presentación Algebra II 2019Documento13 páginasPresentación Algebra II 2019IngenieraPaolaAún no hay calificaciones
- Árbol de Problemas y Árbol de ObjetivosDocumento2 páginasÁrbol de Problemas y Árbol de ObjetivosIngenieraPaolaAún no hay calificaciones
- Algebra IIDocumento14 páginasAlgebra IIIngenieraPaolaAún no hay calificaciones
- Presentación Algebra II 2019Documento10 páginasPresentación Algebra II 2019IngenieraPaolaAún no hay calificaciones
- ExposicionesDocumento4 páginasExposicionesIngenieraPaolaAún no hay calificaciones
- Presentación Algebra II 2019Documento13 páginasPresentación Algebra II 2019IngenieraPaolaAún no hay calificaciones
- TorneoDocumento19 páginasTorneoIngenieraPaolaAún no hay calificaciones
- Presentación Algebra II 2019Documento13 páginasPresentación Algebra II 2019IngenieraPaolaAún no hay calificaciones
- Estructura de Una Planificacion de Clase1Documento2 páginasEstructura de Una Planificacion de Clase1IngenieraPaolaAún no hay calificaciones
- Introducción AutomatizaciónDocumento11 páginasIntroducción AutomatizaciónIngenieraPaolaAún no hay calificaciones
- Tra PDFDocumento2 páginasTra PDFIngenieraPaolaAún no hay calificaciones
- Trabajo 2Documento5 páginasTrabajo 2IngenieraPaolaAún no hay calificaciones
- Marketing 1Documento35 páginasMarketing 1IngenieraPaolaAún no hay calificaciones
- QuinoaDocumento7 páginasQuinoaIngenieraPaolaAún no hay calificaciones
- Lista de AsistenciaDocumento1 páginaLista de AsistenciaIngenieraPaolaAún no hay calificaciones
- EncuestaDocumento1 páginaEncuestaIngenieraPaolaAún no hay calificaciones
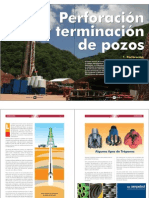
- PerforaciontermiacionDocumento3 páginasPerforaciontermiacionhippohijameAún no hay calificaciones
- KAVINEÑODocumento1 páginaKAVINEÑOIngenieraPaola100% (1)
- Modelos de Gestión de Calidad FinalDocumento28 páginasModelos de Gestión de Calidad FinalIngenieraPaolaAún no hay calificaciones
- Algebra II IntroduccionDocumento7 páginasAlgebra II IntroduccionIngenieraPaolaAún no hay calificaciones
- Modelos de Gestión de Calidad FinalDocumento28 páginasModelos de Gestión de Calidad FinalIngenieraPaolaAún no hay calificaciones
- ¿Qué Es El GNL?: Mundial de Suministro de Gas Natural y La DemandaDocumento5 páginas¿Qué Es El GNL?: Mundial de Suministro de Gas Natural y La DemandaIngenieraPaolaAún no hay calificaciones
- Manual para Elaboración de Trabajo de Integración CurricularDocumento50 páginasManual para Elaboración de Trabajo de Integración CurricularAngieAldazAún no hay calificaciones
- Problemas Actuales de Derechos HumanosDocumento8 páginasProblemas Actuales de Derechos HumanoscarinadocAún no hay calificaciones
- HP Pavilion Dv4-2016laDocumento2 páginasHP Pavilion Dv4-2016laHP_PSGAún no hay calificaciones
- PLAN de CLASES Genoma Humano (Recuperado Automáticamente)Documento3 páginasPLAN de CLASES Genoma Humano (Recuperado Automáticamente)Kenya Melissa Rivera GarciaAún no hay calificaciones
- 13.2.-Balanced Scorecard Como Sistema de Gestión EstratégicaDocumento32 páginas13.2.-Balanced Scorecard Como Sistema de Gestión EstratégicaROY PAREDES RODRIGUEZAún no hay calificaciones
- NANA en Cuerpo y AlmaDocumento5 páginasNANA en Cuerpo y AlmaesperanzaAún no hay calificaciones
- Unidad 1 Fundamentos Del Estudio de La Personalidad. TrabajoDocumento8 páginasUnidad 1 Fundamentos Del Estudio de La Personalidad. TrabajoKely SaldarriagaAún no hay calificaciones
- Semana 12.2Documento3 páginasSemana 12.2Tania Quispe VásquezAún no hay calificaciones
- Curriculum Vitae Pablo YucraDocumento3 páginasCurriculum Vitae Pablo YucraAnonymous GUJsyRkf7EAún no hay calificaciones
- Sistemas de Irrigación en EndodonciaDocumento13 páginasSistemas de Irrigación en EndodonciaSantimio67% (3)
- Actividad 3 - FolletoDocumento2 páginasActividad 3 - FolletoJeny MartínezAún no hay calificaciones
- Vacuna 2017Documento51 páginasVacuna 2017Nazareth puertaAún no hay calificaciones
- ConcordanciaDocumento15 páginasConcordanciaLuisa ElejaldeAún no hay calificaciones
- Análisis de Calidad Del Agua Del Rio La Vieja Del Municipio de CartagoDocumento7 páginasAnálisis de Calidad Del Agua Del Rio La Vieja Del Municipio de CartagoPaola NiñoAún no hay calificaciones
- Factores que definen la personalidad: El autoconcepto y la autoestimaDocumento5 páginasFactores que definen la personalidad: El autoconcepto y la autoestimaAngelyn RangelAún no hay calificaciones
- Planteamiento de Problema y JustificacionDocumento2 páginasPlanteamiento de Problema y JustificacionWilliams VazquezAún no hay calificaciones
- Legislacion Tarea 10Documento4 páginasLegislacion Tarea 10anyeli johana herrera BentancourtAún no hay calificaciones
- Escala evaluación profesores Conners cuestionarioDocumento4 páginasEscala evaluación profesores Conners cuestionarioTeacher Agustin Alvear-BlauAún no hay calificaciones
- Tutorial Camtasia StudioDocumento12 páginasTutorial Camtasia StudioAlex GarciaAún no hay calificaciones
- Control de Calidad en Pollito de Un DíaDocumento24 páginasControl de Calidad en Pollito de Un Díanelly ariasAún no hay calificaciones
- Tarea #1Documento5 páginasTarea #1KEVIN STEVE GUZMAN RODRIGUEZAún no hay calificaciones
- Calibración de yugo magnético conforme a normasDocumento2 páginasCalibración de yugo magnético conforme a normasFider Herrera FloresAún no hay calificaciones
- Proceso de La Formación de La Opinión PúblicaDocumento10 páginasProceso de La Formación de La Opinión PúblicaEDITH LUZ CALSIN CAHUAPAZAAún no hay calificaciones
- Lecciones Aprendidas Plantilla y EjemploDocumento9 páginasLecciones Aprendidas Plantilla y EjemploGenesis TorresAún no hay calificaciones
- Formulario Estudiante Cas.23Documento7 páginasFormulario Estudiante Cas.23Fernando EncisoAún no hay calificaciones