También podría gustarte
- Termodinámica taller presión volumen temperatura cálculosDocumento2 páginasTermodinámica taller presión volumen temperatura cálculosDeinis GomezAún no hay calificaciones
- Trabajo Practico N1Documento3 páginasTrabajo Practico N1Fer ChuAún no hay calificaciones
- Sistema de Ecuaciones, Autovalores, Autovectores y DiagonalizaciónDocumento47 páginasSistema de Ecuaciones, Autovalores, Autovectores y DiagonalizaciónDeyvi La Rosa OrtegaAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento23 páginasSistemas de Ecuaciones LinealesHans Camus EstradaAún no hay calificaciones
- Capítulo III. Sistemas de Ecuaciones LinealesDocumento17 páginasCapítulo III. Sistemas de Ecuaciones LinealesIngenieraPaolaAún no hay calificaciones
- Algebra Lineal 4Documento14 páginasAlgebra Lineal 4Yhen miller Conchucos amesAún no hay calificaciones
- Mat1105e Tema2-1Documento11 páginasMat1105e Tema2-1Andres Miguel Cruz CalleAún no hay calificaciones
- Notas Espacio Académico Algebra Lineal Unidad 1: Programa de Ingeniería CivilDocumento10 páginasNotas Espacio Académico Algebra Lineal Unidad 1: Programa de Ingeniería CivilFelioe MorenoAún no hay calificaciones
- Álgebra lineal esencialDocumento24 páginasÁlgebra lineal esencialmario alonso viena0% (1)
- Sistemas de Ecuaciones LinealesDocumento3 páginasSistemas de Ecuaciones LinealesKiri KirinoAún no hay calificaciones
- Sistemas de Ecuaciones Lineales. Metodo de Gauss-JordanDocumento5 páginasSistemas de Ecuaciones Lineales. Metodo de Gauss-JordanJose Cordova VallejoAún no hay calificaciones
- Tema 8 Sistemas de EcuacionesDocumento4 páginasTema 8 Sistemas de EcuacionesValentin VallejosAún no hay calificaciones
- Primera Tarea MDESCOMDocumento7 páginasPrimera Tarea MDESCOMRicardo GalvisAún no hay calificaciones
- Unidad II Módullo5 Lección5.1Documento17 páginasUnidad II Módullo5 Lección5.1Karen ArangoAún no hay calificaciones
- Sistemas de ecuaciones lineales resueltos mediante la regla de CramerDocumento27 páginasSistemas de ecuaciones lineales resueltos mediante la regla de CramerJose FernandezAún no hay calificaciones
- Semana #04 (Álgebra Lineal)Documento37 páginasSemana #04 (Álgebra Lineal)Giraldo Moya JosueAún no hay calificaciones
- Gauus Con PivoteoDocumento24 páginasGauus Con Pivoteojose contrerasAún no hay calificaciones
- Matemática IDocumento27 páginasMatemática IELVER SOTO TANTALEANAún no hay calificaciones
- Segundo Parcial Con PropuestosDocumento86 páginasSegundo Parcial Con PropuestosOscar FonsecaAún no hay calificaciones
- Sel Definicion y Metodos de Resolucion 2Documento23 páginasSel Definicion y Metodos de Resolucion 2Ricardo Rosa BarbaAún no hay calificaciones
- Guia Sistemas de EcuacionesDocumento23 páginasGuia Sistemas de EcuacionesChane XDAún no hay calificaciones
- Sistemas de Ecuaciones Lineales (2° Parte)Documento13 páginasSistemas de Ecuaciones Lineales (2° Parte)Marcos SulmaisterAún no hay calificaciones
- 8-Sistemas LinealesDocumento20 páginas8-Sistemas Linealesricardo zapataAún no hay calificaciones
- Sistemas Diferenciales Lineales: Resolución mediante DiagonalizaciónDocumento17 páginasSistemas Diferenciales Lineales: Resolución mediante Diagonalizacióndaniela ordoñezAún no hay calificaciones
- Cholesky y DoolitleDocumento28 páginasCholesky y DoolitleRosmery Cristina Valeriano PozoAún no hay calificaciones
- Lectura 1 PDFDocumento26 páginasLectura 1 PDFluis enrique morel hernadezAún no hay calificaciones
- Sistemas de ecuaciones lineales y matrices para economistasDocumento9 páginasSistemas de ecuaciones lineales y matrices para economistascamilaAún no hay calificaciones
- Sesion 04 - Sistema de Ecuaciones LinealesDocumento18 páginasSesion 04 - Sistema de Ecuaciones LinealesGeison AlexanderAún no hay calificaciones
- MATEMÁTICA I - U - I-Matriz InversaDocumento15 páginasMATEMÁTICA I - U - I-Matriz InversaMayuri VeintimillaAún no hay calificaciones
- Reglas de CramerDocumento13 páginasReglas de CramerAndres CaleroAún no hay calificaciones
- SEL Métodos ResoluciónDocumento8 páginasSEL Métodos ResoluciónJosé FernándezAún no hay calificaciones
- Semana 10 Algebra LinealDocumento26 páginasSemana 10 Algebra LinealJUAN CARLOS COSME LOPEZAún no hay calificaciones
- Matematica IiDocumento39 páginasMatematica IiAlessandro NVAún no hay calificaciones
- S6 SistemasDeEcuacionesDiferencialesLinealesDocumento62 páginasS6 SistemasDeEcuacionesDiferencialesLinealesfrank alexAún no hay calificaciones
- Sistemas de ecuaciones lineales Tecnologico Nacional de MéxicoDocumento13 páginasSistemas de ecuaciones lineales Tecnologico Nacional de MéxicoAlberto RobledaAún no hay calificaciones
- Ecuación MatricialDocumento9 páginasEcuación MatricialCesar SantiagoAún no hay calificaciones
- Guía de MatematicasDocumento16 páginasGuía de MatematicasLuis Manuel Serrano AndradeAún no hay calificaciones
- unidad2-sistemasdeecuacionesDocumento41 páginasunidad2-sistemasdeecuacionesfannyAún no hay calificaciones
- Sistemas de Ecuaciones (Resumen)Documento7 páginasSistemas de Ecuaciones (Resumen)Olalla Chamba Arturo NicolásAún no hay calificaciones
- TP5-2023Documento2 páginasTP5-2023ramosmarcelookAún no hay calificaciones
- Tipos de Sistemas de EcuacionesDocumento17 páginasTipos de Sistemas de Ecuacioneseder adrian cardona velaAún no hay calificaciones
- D7 - 2020-2 - Ayg - Sel Interpretación Geométrica - Eliminacione GaussianaDocumento30 páginasD7 - 2020-2 - Ayg - Sel Interpretación Geométrica - Eliminacione GaussianaJęåń Ørtįz LAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento6 páginasSistemas de Ecuaciones Linealesandy 10Aún no hay calificaciones
- Trabajo de Investigación-Matriz Inversa y Determinantes YISEDocumento11 páginasTrabajo de Investigación-Matriz Inversa y Determinantes YISEYoselin SantiagoAún no hay calificaciones
- Semana 3Documento41 páginasSemana 3Adrian ValverdeAún no hay calificaciones
- Clase 10-Sistemas de Ecuaciones LinealesDocumento26 páginasClase 10-Sistemas de Ecuaciones Linealeshigh fiveAún no hay calificaciones
- 19 B Algebra Sistemas de Ecuaciones LinealesDocumento35 páginas19 B Algebra Sistemas de Ecuaciones LinealesholaAún no hay calificaciones
- (S14) - Unidad V - Sistema de Ecuaciones LinealesDocumento7 páginas(S14) - Unidad V - Sistema de Ecuaciones Lineales0512022031Aún no hay calificaciones
- Primer Parcial - Tema - 4 - Segundo Cuatrimestre - Respuestas DesarrolladasDocumento6 páginasPrimer Parcial - Tema - 4 - Segundo Cuatrimestre - Respuestas Desarrolladassofimaldonado.747Aún no hay calificaciones
- PPT02 DeterminantesDocumento17 páginasPPT02 DeterminantesErica EspinozaAún no hay calificaciones
- 1.6-1.8 Sistemas de Ecuaciones Lineales-SolucionesDocumento36 páginas1.6-1.8 Sistemas de Ecuaciones Lineales-SolucionesPaul Wladimir AlejandroAún no hay calificaciones
- Sistema de ecuaciones lineales CramerDocumento34 páginasSistema de ecuaciones lineales CramerYajaira Xiomara Rosales PadillaAún no hay calificaciones
- 1 Sistemas de Ecuaciones LinealesDocumento92 páginas1 Sistemas de Ecuaciones LinealesJavier RuizAún no hay calificaciones
- Sistemas de Ecuaciones LinealesDocumento9 páginasSistemas de Ecuaciones LinealesAngélica RivasAún no hay calificaciones
- Capítulo 2Documento42 páginasCapítulo 2Lisandro VLAún no hay calificaciones
- Ejercicios de Matrices y Álgebra LinealDe EverandEjercicios de Matrices y Álgebra LinealCalificación: 5 de 5 estrellas5/5 (1)
- Conceptos magnéticos fundamentalesDocumento44 páginasConceptos magnéticos fundamentalesRosmery Cristina Valeriano PozoAún no hay calificaciones
- 04 - Maquinas Asincronas o de Induccion PDFDocumento278 páginas04 - Maquinas Asincronas o de Induccion PDFAlejandroMSLAún no hay calificaciones
- Maquinas Electricas Clase 11.18Documento80 páginasMaquinas Electricas Clase 11.18Rosmery Cristina Valeriano PozoAún no hay calificaciones
- UntitledDocumento16 páginasUntitledRosmery Cristina Valeriano PozoAún no hay calificaciones
- Transform AdoresDocumento6 páginasTransform AdoresManuel CoaguilaAún no hay calificaciones
- UntitledDocumento54 páginasUntitledRosmery Cristina Valeriano PozoAún no hay calificaciones
- Clase 4Documento25 páginasClase 4Victor TorresAún no hay calificaciones
- Maquinas Electricas Clase 3.1Documento35 páginasMaquinas Electricas Clase 3.1Rosmery Cristina Valeriano PozoAún no hay calificaciones
- CD Sema 15 Contador DigitalDocumento24 páginasCD Sema 15 Contador DigitalRosmery Cristina Valeriano PozoAún no hay calificaciones
- Maquinaria eléctrica y propiedades magnéticasDocumento20 páginasMaquinaria eléctrica y propiedades magnéticasRosmery Cristina Valeriano PozoAún no hay calificaciones
- B Sem 11 Codificadores y DecodificadoresDocumento13 páginasB Sem 11 Codificadores y DecodificadoresRosmery Cristina Valeriano PozoAún no hay calificaciones
- Metodo de Biseccion 2Documento26 páginasMetodo de Biseccion 2Rosmery Cristina Valeriano PozoAún no hay calificaciones
- B Sem 14 FF Master SlaveDocumento17 páginasB Sem 14 FF Master SlaveRosmery Cristina Valeriano PozoAún no hay calificaciones
- Fiee - UnmsmDocumento81 páginasFiee - UnmsmRosmery Cristina Valeriano PozoAún no hay calificaciones
- UntitledDocumento15 páginasUntitledRosmery Cristina Valeriano PozoAún no hay calificaciones
- Sem 6 DigDocumento24 páginasSem 6 DigRosmery Cristina Valeriano PozoAún no hay calificaciones
- Sem 3 Dig - Codigos Bi NariosDocumento23 páginasSem 3 Dig - Codigos Bi NariosRosmery Cristina Valeriano PozoAún no hay calificaciones
- NormaDocumento9 páginasNormaRosmery Cristina Valeriano PozoAún no hay calificaciones
- Valores y Vectores PropiosDocumento25 páginasValores y Vectores PropiosRosmery Cristina Valeriano PozoAún no hay calificaciones
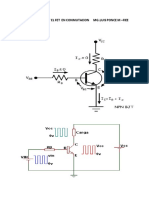
- BJT y FET en conmutaciónDocumento21 páginasBJT y FET en conmutaciónRosmery Cristina Valeriano PozoAún no hay calificaciones
- IntroducciónDocumento25 páginasIntroducciónRosmery Cristina Valeriano PozoAún no hay calificaciones
- Método de Newton-SecanteDocumento21 páginasMétodo de Newton-SecanteRosmery Cristina Valeriano PozoAún no hay calificaciones
- Metodo IterativoDocumento27 páginasMetodo IterativoRosmery Cristina Valeriano PozoAún no hay calificaciones
- Sem 2 Dig - Suma-Resta de BinariosDocumento9 páginasSem 2 Dig - Suma-Resta de BinariosRosmery Cristina Valeriano PozoAún no hay calificaciones
- Metodo de BiseccionDocumento25 páginasMetodo de BiseccionRosmery Cristina Valeriano PozoAún no hay calificaciones
- 5 OndasDocumento54 páginas5 OndasJuan Francisco AcostaAún no hay calificaciones
- Hidrostatica SgaDocumento49 páginasHidrostatica Sgapedro eliseo valladares rivasAún no hay calificaciones
- 3 Oscilaciones MasDocumento25 páginas3 Oscilaciones MasJuan Francisco AcostaAún no hay calificaciones
- Cholesky y DoolitleDocumento28 páginasCholesky y DoolitleRosmery Cristina Valeriano PozoAún no hay calificaciones
- Tarea Marco Teórico MetodologíaDocumento11 páginasTarea Marco Teórico MetodologíaFERNANDO PAUL BALCAZAR IZQUIERDOAún no hay calificaciones
- Examen de Aritmetica-Cuarto Año SecDocumento2 páginasExamen de Aritmetica-Cuarto Año SecJose Paiva MozoAún no hay calificaciones
- Emilio Zola - El Mandato de Una MuertaDocumento130 páginasEmilio Zola - El Mandato de Una MuertachicarokAún no hay calificaciones
- Fuentes Del Derecho Ambiental Diapositivas - IrmaDocumento8 páginasFuentes Del Derecho Ambiental Diapositivas - IrmaRudiel VasquezAún no hay calificaciones
- A. Ruido y VibracionesDocumento39 páginasA. Ruido y VibracionesWilson RcallaAún no hay calificaciones
- PEUV670707 UV3 FA00000 GHJKLÑDocumento1 páginaPEUV670707 UV3 FA00000 GHJKLÑIvan Emigdio Gonzalez SalazarAún no hay calificaciones
- Actividad Cuales Son Los Pasos Del Metodo CientificoDocumento4 páginasActividad Cuales Son Los Pasos Del Metodo CientificoValentina Lujan CabezaAún no hay calificaciones
- Trabajo Integrador Proyecto OrganizacionalDocumento4 páginasTrabajo Integrador Proyecto OrganizacionalJoaquin RodriguezAún no hay calificaciones
- Demanda Contenciosa Administrativa - POR DESPIDODocumento8 páginasDemanda Contenciosa Administrativa - POR DESPIDOVictor LarcoAún no hay calificaciones
- Tema 9 Diseño de La Política RetributivaDocumento3 páginasTema 9 Diseño de La Política RetributivaJavier Garcia100% (1)
- Muestreo Del CafeDocumento4 páginasMuestreo Del CafeJOHAN LEONARDO AYASTA GONZALESAún no hay calificaciones
- Captura de Pantalla 2023-01-21 A La(s) 11.21.11 A.M.Documento1 páginaCaptura de Pantalla 2023-01-21 A La(s) 11.21.11 A.M.re-bel016hotmail.comAún no hay calificaciones
- 3.1.10.2. Cuadro Comparativo Obras ProvisionalesDocumento18 páginas3.1.10.2. Cuadro Comparativo Obras Provisionalesanthony valer sanchezAún no hay calificaciones
- Contrato de Construccion Por Administracion DelegadaDocumento6 páginasContrato de Construccion Por Administracion DelegadaBryan V CAún no hay calificaciones
- Manual para SCOUT MARINOS PDFDocumento61 páginasManual para SCOUT MARINOS PDFOscar Salazar Morales100% (2)
- Presentacion Escenarios - T4Documento11 páginasPresentacion Escenarios - T4fabio lopezAún no hay calificaciones
- 071-Iroso BaraDocumento8 páginas071-Iroso BaraNiwo PeñalozaAún no hay calificaciones
- ¿Qué Son Fake News o Noticias Falsas?Documento4 páginas¿Qué Son Fake News o Noticias Falsas?pablozaguirremonAún no hay calificaciones
- Lista de Chequeo o Verificacion de Las Buenas Practicas de ManufacturaDocumento8 páginasLista de Chequeo o Verificacion de Las Buenas Practicas de ManufacturaEliana SegoviaAún no hay calificaciones
- Reserva - B - Criterios Modelo 6 Andaluc°a 15-16Documento2 páginasReserva - B - Criterios Modelo 6 Andaluc°a 15-16benitaAún no hay calificaciones
- Tesis Internacional de Ingenieria SismorresistenteDocumento64 páginasTesis Internacional de Ingenieria Sismorresistenteamelia cruz arceAún no hay calificaciones
- Proyecto ejecutivo TP1Documento5 páginasProyecto ejecutivo TP1facundo prencisAún no hay calificaciones
- Exámen Grado Medio Parte Cientifico-Tecnologica Conv 2Documento6 páginasExámen Grado Medio Parte Cientifico-Tecnologica Conv 2Beatriz RizoAún no hay calificaciones
- CyD UP7 2022 1Documento93 páginasCyD UP7 2022 1Gabriela Delgado CastilloAún no hay calificaciones
- Taller Economía CircularDocumento2 páginasTaller Economía CircularBrahian ferney nieto chavesAún no hay calificaciones
- ArmadurasDocumento10 páginasArmadurasJosé Miguel Jácome AlvaradoAún no hay calificaciones
- Oro y Cobre en DibullaDocumento20 páginasOro y Cobre en DibullaAndreaFuentesAún no hay calificaciones
- Agua, Liquidos y ElectrolitosDocumento24 páginasAgua, Liquidos y ElectrolitosArgelia BorgesAún no hay calificaciones