También podría gustarte
- CUESTIONARIO CAPITULO 3 TRANSFOR y GENERADDocumento13 páginasCUESTIONARIO CAPITULO 3 TRANSFOR y GENERADFrancisco Zuñiga25% (4)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Seat Ibiza Bby CuadroDocumento21 páginasSeat Ibiza Bby CuadroMike100% (1)
- Gate Pass - 50082185Documento1 páginaGate Pass - 50082185Trans de la chica mengibarAún no hay calificaciones
- Curva de Vacio Generador DCDocumento9 páginasCurva de Vacio Generador DCOdalis PerezAún no hay calificaciones
- Unidad 2 Maquinas Sincronas FinalDocumento25 páginasUnidad 2 Maquinas Sincronas FinalJosé Ca BlancoAún no hay calificaciones
- Motor de DC en DerivacionDocumento5 páginasMotor de DC en DerivacionAlvaro Chasqui0% (2)
- 17 Evolucion y Sus Repercusiones SocialesDocumento24 páginas17 Evolucion y Sus Repercusiones SocialesConcepcion Marquez Hernandez80% (5)
- Generador de Corriente DirectaDocumento6 páginasGenerador de Corriente DirectajyebraAún no hay calificaciones
- EficienciaDocumento7 páginasEficienciaOmar FragosoAún no hay calificaciones
- Practica de Lab03 Motor DCDocumento14 páginasPractica de Lab03 Motor DCAlonzo CotoAún no hay calificaciones
- Laboratorio 9Documento8 páginasLaboratorio 9Samuel Gallardo AlamaAún no hay calificaciones
- Lab2 Maquinas Eléctricas y RotativasDocumento12 páginasLab2 Maquinas Eléctricas y RotativasDiño Yilton Fajardo SabinoAún no hay calificaciones
- Tipos de Generador de Corriente ContinuaDocumento7 páginasTipos de Generador de Corriente ContinuaSanduchitoAún no hay calificaciones
- Correccion Del Factor de PotenciaDocumento10 páginasCorreccion Del Factor de PotenciaVega CèsarAún no hay calificaciones
- Resumen Generadores Sincronos PDFDocumento12 páginasResumen Generadores Sincronos PDFJaviStg1Aún no hay calificaciones
- Pre Laboratorio ElectrotecniaDocumento16 páginasPre Laboratorio ElectrotecniaJavier quijadaAún no hay calificaciones
- Circuito de Motor TrifásicoDocumento6 páginasCircuito de Motor TrifásicoJOSEROBERTO OLIVERA CUEVAAún no hay calificaciones
- Laboratorio N°2: El Transformador Monofásico PrevioDocumento4 páginasLaboratorio N°2: El Transformador Monofásico PrevioCAPAún no hay calificaciones
- Marisol Chipana Mamani - TERCER EXAMEN MAQ. CORR ALTERNADocumento9 páginasMarisol Chipana Mamani - TERCER EXAMEN MAQ. CORR ALTERNAMari MamaniAún no hay calificaciones
- Semana 12 Eficiencia de Motores DCDocumento13 páginasSemana 12 Eficiencia de Motores DCYack CQAún no hay calificaciones
- Separata de Problemas de Máquinas DC 2018-IDocumento9 páginasSeparata de Problemas de Máquinas DC 2018-IImanol Valdivia LugoAún no hay calificaciones
- Teoría Del Funcionamiento de Un Generador Sincrónico de Corriente Alterna ComercialDocumento29 páginasTeoría Del Funcionamiento de Un Generador Sincrónico de Corriente Alterna Comercialdreckool100% (1)
- Obtención de ParametrosDocumento6 páginasObtención de ParametrosDavid PeñaAún no hay calificaciones
- Practica 14Documento8 páginasPractica 14Valeria ChavezAún no hay calificaciones
- Problemas Resueltos Motores de Corriente AlternaDocumento56 páginasProblemas Resueltos Motores de Corriente AlternaCarlos Vera Dávila100% (8)
- LABORATORIO 3 Ensayo de Vacío Motor InduccionDocumento12 páginasLABORATORIO 3 Ensayo de Vacío Motor InduccionJohn Edgard Canahua Uchasara33% (3)
- Tarea Maquinasfernando 2Documento5 páginasTarea Maquinasfernando 2Solis Castillo Gerardo SamuelAún no hay calificaciones
- Ensayo de Vacío Motor InduccionDocumento8 páginasEnsayo de Vacío Motor InduccionRaul Jorge Huillca Soria100% (1)
- Motores y Generadores Electricos 3Documento68 páginasMotores y Generadores Electricos 3Danny Olmedo TorresAún no hay calificaciones
- Máquinas SíncronasDocumento8 páginasMáquinas SíncronasjyebraAún no hay calificaciones
- Generador de Corriente Continua PDFDocumento13 páginasGenerador de Corriente Continua PDFJhonatan A OrzAún no hay calificaciones
- Generador ShuntDocumento17 páginasGenerador ShuntyelscinAún no hay calificaciones
- Ejercicios MCC - Prof. Waldemar GodoyDocumento8 páginasEjercicios MCC - Prof. Waldemar Godoymirock65Aún no hay calificaciones
- Resumen de Generadores SíncronosDocumento6 páginasResumen de Generadores Síncronosfany pmAún no hay calificaciones
- LABORATORIO 3 Ensayo de Vacío Motor InduccionDocumento17 páginasLABORATORIO 3 Ensayo de Vacío Motor InduccionAnonymous nojMipHndeAún no hay calificaciones
- Problemasyejerciciosdelcapitulo9 Felipeedisonyleonardo 120717223552 Phpapp02Documento12 páginasProblemasyejerciciosdelcapitulo9 Felipeedisonyleonardo 120717223552 Phpapp02Piero Alarcon CanovaAún no hay calificaciones
- Prelaboratorio III ElectrotecniaDocumento10 páginasPrelaboratorio III ElectrotecniastephanyAún no hay calificaciones
- TRANSFORMADORESDocumento16 páginasTRANSFORMADORESAngel MartinezAún no hay calificaciones
- 02.prueba en Vacío de Un Motor de Corriente ContinuaDocumento14 páginas02.prueba en Vacío de Un Motor de Corriente ContinuaAlexis TorresAún no hay calificaciones
- Generador de Corriente ContinuaDocumento13 páginasGenerador de Corriente Continuaaledrop1100% (1)
- Laboratorio # 2 CaracteDocumento9 páginasLaboratorio # 2 CaracteyelscinAún no hay calificaciones
- Estudio de Mercado - Estrategias ComercialesDocumento11 páginasEstudio de Mercado - Estrategias ComercialesRoy Gabriel RamosAún no hay calificaciones
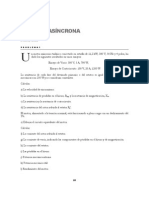
- Generadores AsíncronosDocumento9 páginasGeneradores Asíncronosjavier roman barba floresAún no hay calificaciones
- Generadores de CC ShuntDocumento17 páginasGeneradores de CC ShuntFausto YánezAún no hay calificaciones
- Me II 204 Operacion Dinamica de Maquinas Electricas AmpliadaDocumento32 páginasMe II 204 Operacion Dinamica de Maquinas Electricas AmpliadaEdgar Vidal Espinoza OrtegaAún no hay calificaciones
- Actividad 1 Unidad 2 Motores 5Documento12 páginasActividad 1 Unidad 2 Motores 5Daniel MarquezAún no hay calificaciones
- Expo Generadores CDDocumento24 páginasExpo Generadores CDPedro AvendañoAún no hay calificaciones
- Obtencion de Parametros y Ensayos Del Circuito Equivalente Del Motor TrifasicoDocumento11 páginasObtencion de Parametros y Ensayos Del Circuito Equivalente Del Motor TrifasicoAlex SalasAún no hay calificaciones
- Guía 4 Máquinas Corriente ContinuaDocumento9 páginasGuía 4 Máquinas Corriente ContinuaMathyass PixeledAún no hay calificaciones
- Taller Final de MáquinasDocumento7 páginasTaller Final de MáquinasCarlos TinocoAún no hay calificaciones
- Circuito Semejante Del Motor de AsincronicoDocumento17 páginasCircuito Semejante Del Motor de Asincronicojomaz7112zajmAún no hay calificaciones
- Laboratorio MaquinasDocumento12 páginasLaboratorio MaquinasManuel MorenoAún no hay calificaciones
- Preguntas y Respuestas de Transformadores PDFDocumento9 páginasPreguntas y Respuestas de Transformadores PDFAlfredo Roman PowerAún no hay calificaciones
- Clasificacion y Metodos de ArranqueDocumento89 páginasClasificacion y Metodos de Arranquebetitoooo100% (1)
- Laboratorio 3Documento15 páginasLaboratorio 3GIANINA ESTEPHANY PEREZ CAJAAún no hay calificaciones
- PRÁCTICA 1. SíncronasDocumento8 páginasPRÁCTICA 1. SíncronasUziel HernandezAún no hay calificaciones
- LABORATORIO 3 Ensayo de Vacío Motor InduccionDocumento7 páginasLABORATORIO 3 Ensayo de Vacío Motor InduccionBel BarretoAún no hay calificaciones
- Maquinas Electricas - ApuntesDocumento45 páginasMaquinas Electricas - ApuntesXsendAún no hay calificaciones
- Maquinas Eléctricas Lab04Documento33 páginasMaquinas Eléctricas Lab04Marco Antonio ClaresAún no hay calificaciones
- Test Máquinas SincrónicasDocumento13 páginasTest Máquinas SincrónicasEdgar EspinolaAún no hay calificaciones
- Montaje y mantenimiento de transformadores. ELEE0109De EverandMontaje y mantenimiento de transformadores. ELEE0109Aún no hay calificaciones
- Electricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209De EverandElectricidad, electromagnetismo y electrónica aplicados al automóvil. TMVG0209Calificación: 2 de 5 estrellas2/5 (1)
- Actividades Martes 24 OctDocumento1 páginaActividades Martes 24 OctSamuel Esteban Rodriguez LopezAún no hay calificaciones
- Enero 2Documento10 páginasEnero 2Samuel Esteban Rodriguez LopezAún no hay calificaciones
- Planeación Del 13 Al 17 de Febrero Del 2023Documento13 páginasPlaneación Del 13 Al 17 de Febrero Del 2023Samuel Esteban Rodriguez LopezAún no hay calificaciones
- ForoDocumento1 páginaForoSamuel Esteban Rodriguez LopezAún no hay calificaciones
- EntramadoDocumento2 páginasEntramadoSamuel Esteban Rodriguez LopezAún no hay calificaciones
- Parciales Probabilidad y EstadisticaDocumento3 páginasParciales Probabilidad y EstadisticaSamuel Esteban Rodriguez Lopez0% (1)
- Álgebra de Boole - Consulta1Documento7 páginasÁlgebra de Boole - Consulta1Sonia Elizabeth AmanchaAún no hay calificaciones
- Frigerio y Diker La Transmision en Las Sociedades PDFDocumento8 páginasFrigerio y Diker La Transmision en Las Sociedades PDFcristian41historiaAún no hay calificaciones
- 1 Informe Academico-19aDocumento3 páginas1 Informe Academico-19aCarlos Zuñiga LoyolaAún no hay calificaciones
- Apple Resume NDocumento4 páginasApple Resume NPedro Guillen CruzAún no hay calificaciones
- Certificado Retilap Luminarias AlutraficDocumento15 páginasCertificado Retilap Luminarias AlutraficKenneth CorreaAún no hay calificaciones
- Pasos para Realizar NOVEDADES en El REPSDocumento10 páginasPasos para Realizar NOVEDADES en El REPSAndres Fabian MonjeAún no hay calificaciones
- Zinc Clad II Pe EpcmDocumento1 páginaZinc Clad II Pe EpcmRichard L Condori ChAún no hay calificaciones
- Protege Tu Web Checklist Medidas WebDocumento9 páginasProtege Tu Web Checklist Medidas Webmigue_777Aún no hay calificaciones
- Cimentaciones Sesión 10Documento47 páginasCimentaciones Sesión 10SUSANAún no hay calificaciones
- Qué Debe Enseñar La Escuela BásicaDocumento5 páginasQué Debe Enseñar La Escuela BásicaSusanitta VebaAún no hay calificaciones
- Ayuda Memoria ApurimacDocumento5 páginasAyuda Memoria ApurimacvanesiiiitaAún no hay calificaciones
- Ensayo (Ventajas Competitivas y Comparativas)Documento4 páginasEnsayo (Ventajas Competitivas y Comparativas)Fredy Barcenas100% (2)
- Dijk StraDocumento4 páginasDijk StraJulioPinoMedinaAún no hay calificaciones
- Sisst de Inyeccion y MuestreoDocumento5 páginasSisst de Inyeccion y MuestreoEnrique Javier Gonzalez HenríquezAún no hay calificaciones
- Reglamento de Seguridad IndustrialDocumento13 páginasReglamento de Seguridad IndustrialBrenda Alfaro AlvarezAún no hay calificaciones
- Curso Avanzado de VoIP en H323Documento52 páginasCurso Avanzado de VoIP en H323Diana MejiaAún no hay calificaciones
- Tesis Final 27 PDFDocumento130 páginasTesis Final 27 PDFjulietaAún no hay calificaciones
- Prácticas Culturales y Agronómicas para El Manejo y Conservación Del Suelo, 2018Documento15 páginasPrácticas Culturales y Agronómicas para El Manejo y Conservación Del Suelo, 2018Dan Pinzón-Gómez0% (2)
- Guía Transporte - Transbordo PDFDocumento23 páginasGuía Transporte - Transbordo PDFAir LAún no hay calificaciones
- Esclerómetro Ensayo Semidestructivo HormigónDocumento6 páginasEsclerómetro Ensayo Semidestructivo HormigónThaliEspinozaAún no hay calificaciones
- Texto PMTD-2009Documento120 páginasTexto PMTD-2009Marco ArceAún no hay calificaciones
- 105 18138 4620000283 Car Ant Mep 0001Documento4 páginas105 18138 4620000283 Car Ant Mep 0001Miriam LopezAún no hay calificaciones
- Teorema de Bernoulli PDFDocumento17 páginasTeorema de Bernoulli PDFJGibson FiestasAún no hay calificaciones
- Reportaje c150 EscuelaDocumento5 páginasReportaje c150 EscuelaaasfrgehAún no hay calificaciones
- Programa de Mantenimiento de MinicargadorDocumento1 páginaPrograma de Mantenimiento de MinicargadorManuelAún no hay calificaciones
- CICA, Forja Del Software Libre y SubversionDocumento54 páginasCICA, Forja Del Software Libre y SubversionJuan Carlos Rubio PinedaAún no hay calificaciones