También podría gustarte
- Diseño de Un Sistema de Control en Una Planta de Intercambio TérmicoDocumento10 páginasDiseño de Un Sistema de Control en Una Planta de Intercambio TérmicoDaniel QuisbertAún no hay calificaciones
- Área de Educación Técnica de Metales: Soldadura OxiacetilénicaDocumento36 páginasÁrea de Educación Técnica de Metales: Soldadura OxiacetilénicaDaniel QuisbertAún no hay calificaciones
- Soldadura Blanda. Guía de Laboratorio 1Documento18 páginasSoldadura Blanda. Guía de Laboratorio 1Daniel Quisbert0% (1)
- Mantenimiento v4.0 Recargado Full HDDocumento2 páginasMantenimiento v4.0 Recargado Full HDDaniel QuisbertAún no hay calificaciones
- 2da Practica Mec 213-Invierno 2018Documento7 páginas2da Practica Mec 213-Invierno 2018Daniel QuisbertAún no hay calificaciones
- PRecupeDocumento2 páginasPRecupeDaniel QuisbertAún no hay calificaciones
- Ajustes de Curvas PDFDocumento6 páginasAjustes de Curvas PDFDaniel QuisbertAún no hay calificaciones
- G-4 Trabajo de InvestigaciónDocumento27 páginasG-4 Trabajo de InvestigaciónGuiandra HuansiAún no hay calificaciones
- Psicopedagogia de Las Ciencias NaturalesDocumento4 páginasPsicopedagogia de Las Ciencias NaturalesLE Gerardo0% (1)
- Trabajo Del Curso - Primera Entrega - TR1 - ADMINISTRACION Y ORGANIZACION DE EMPRESAS WILMERDocumento11 páginasTrabajo Del Curso - Primera Entrega - TR1 - ADMINISTRACION Y ORGANIZACION DE EMPRESAS WILMERWilmer Heras100% (2)
- Pregunta #2Documento7 páginasPregunta #2Tommy angulo garciaAún no hay calificaciones
- Efectos en Lineas de Transmision PDFDocumento131 páginasEfectos en Lineas de Transmision PDFJuanito Saavedra De La CruzAún no hay calificaciones
- Practica Basada en La Evidencia FonoaudilogiaDocumento5 páginasPractica Basada en La Evidencia FonoaudilogiaSOLEDAD CONTRERASAún no hay calificaciones
- Acerca de La Coordinación. Exploración Psicodramática Sobre Aspectos Que Ocupan Al Coordinador GrupalDocumento3 páginasAcerca de La Coordinación. Exploración Psicodramática Sobre Aspectos Que Ocupan Al Coordinador GrupalMilena ChirinoAún no hay calificaciones
- Coordinación de Protecciones Eléctricas en El Sistema de Distribución A Nivel de 34,5 KV y 13,8 KV Del Área Pesado, Distrito Morichal, PdvsaDocumento172 páginasCoordinación de Protecciones Eléctricas en El Sistema de Distribución A Nivel de 34,5 KV y 13,8 KV Del Área Pesado, Distrito Morichal, PdvsaDanielAlejandroRamosQueroAún no hay calificaciones
- Grupos de TrabajoDocumento7 páginasGrupos de TrabajoAlejandro Garcia JuarezAún no hay calificaciones
- Gusanos Que Habitan El SueloDocumento8 páginasGusanos Que Habitan El SueloDiego Rojas MezaAún no hay calificaciones
- 2019 - HA5019 - Programa 1.0 - ABEDocumento5 páginas2019 - HA5019 - Programa 1.0 - ABESteven Monge VindasAún no hay calificaciones
- EdA 4-TABLA PERIÓDICADocumento5 páginasEdA 4-TABLA PERIÓDICAJean Carlos Laura VillcaAún no hay calificaciones
- Articles-332018 PriorizacionDocumento36 páginasArticles-332018 PriorizacionPauly PolitaAún no hay calificaciones
- ConflictosDocumento1 páginaConflictosjulyAún no hay calificaciones
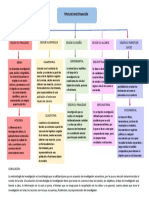
- Mapa Conceptual Tipos de InvestigaciónDocumento1 páginaMapa Conceptual Tipos de InvestigaciónSusy Campos67% (3)
- Lectura Rob Preece - Valores Del CorazónDocumento3 páginasLectura Rob Preece - Valores Del CorazónMariaAún no hay calificaciones
- Examen - Ley 29783Documento2 páginasExamen - Ley 29783Felix RiveraAún no hay calificaciones
- Zee La Convencion Final-16-17Documento2 páginasZee La Convencion Final-16-17Juan LorenzoAún no hay calificaciones
- ACTIVIDAD 14 - CompletedDocumento10 páginasACTIVIDAD 14 - CompletedDIANA ROSA SOTO MEZARINOAún no hay calificaciones
- CTA - U8 - 2do Grado - Sesion 01Documento7 páginasCTA - U8 - 2do Grado - Sesion 01ruth cardenas canalesAún no hay calificaciones
- 5 Reglas de OroDocumento5 páginas5 Reglas de OroMariano GentileAún no hay calificaciones
- Perfil Miguel GrauDocumento110 páginasPerfil Miguel GrauJulio Jonathan Núñez RojasAún no hay calificaciones
- RASUWILLKADocumento2 páginasRASUWILLKAYhãdëld Îgńãsïõ ÖrdãyãAún no hay calificaciones
- A La DerivaDocumento10 páginasA La DerivaLuis Antonio Gonzales De La CruzAún no hay calificaciones
- Prueba Diagnóstica 11ºDocumento4 páginasPrueba Diagnóstica 11ºnickdelahozruaAún no hay calificaciones
- Cargas formalesClO4Documento21 páginasCargas formalesClO4Francy Valentina Porras GalvisAún no hay calificaciones
- Reporte de Investigación de Mercado Del Sector Automotriz.: Proyecto IntegradorDocumento7 páginasReporte de Investigación de Mercado Del Sector Automotriz.: Proyecto IntegradorMzio ECAún no hay calificaciones
- Manual de Instrucciones Dinamómetro Digital: Sauter FCDocumento19 páginasManual de Instrucciones Dinamómetro Digital: Sauter FCkelvynAún no hay calificaciones
- Formato Proyecto en Curso o Terminado RREDSI Deptal 2020Documento3 páginasFormato Proyecto en Curso o Terminado RREDSI Deptal 2020kelly tatiana zapata castrillonAún no hay calificaciones
- 3.-Somos Únicos y Diferentes, Pero Tenemos Los Mismos DerechosDocumento3 páginas3.-Somos Únicos y Diferentes, Pero Tenemos Los Mismos DerechosCeli Orosco YauriAún no hay calificaciones