También podría gustarte
- Problemas Matemáticas 5º Primaria - Ana GalindoDocumento15 páginasProblemas Matemáticas 5º Primaria - Ana GalindoPalabrasAzules83% (493)
- Manual de Robomind PDFDocumento9 páginasManual de Robomind PDFLowiseAún no hay calificaciones
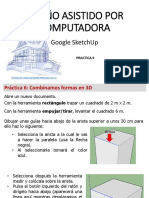
- Formas 3dDocumento19 páginasFormas 3dlorenscribdAún no hay calificaciones
- Archivado SARADocumento29 páginasArchivado SARAPaula V. Galliussi100% (1)
- Guía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 2 - Tarea 4 - Componente PrácticoDocumento11 páginasGuía para El Desarrollo Del Componente Práctico y Rúbrica de Evaluación - Unidad 2 - Tarea 4 - Componente PrácticoSergioAún no hay calificaciones
- Cuadro ComparativoDocumento6 páginasCuadro Comparativoboyca100% (1)
- Scratch Aprende A Programar JugandoDocumento13 páginasScratch Aprende A Programar JugandoLowiseAún no hay calificaciones
- Taller Práctico Google SketchupDocumento2 páginasTaller Práctico Google SketchupErickAún no hay calificaciones
- Examen Final Gestion de La Informacion PDFDocumento16 páginasExamen Final Gestion de La Informacion PDFISABELLA100% (1)
- Proyectos CAD con Tinkercad | Modelos 3D Parte 1: Aprende a crear objetos 3D avanzados con Tinkercad de forma divertidaDe EverandProyectos CAD con Tinkercad | Modelos 3D Parte 1: Aprende a crear objetos 3D avanzados con Tinkercad de forma divertidaAún no hay calificaciones
- Practica de RobomindDocumento3 páginasPractica de RobomindRosa Rojas PintoAún no hay calificaciones
- Actividades S1 AlgoritmosDocumento3 páginasActividades S1 AlgoritmosLina RicoAún no hay calificaciones
- Práctica 8 Scratch AcuarioDocumento5 páginasPráctica 8 Scratch AcuariodasamagicAún no hay calificaciones
- Aprendiendo Programar Unidad 2 2021Documento11 páginasAprendiendo Programar Unidad 2 2021Luna HPAún no hay calificaciones
- ScratchDocumento17 páginasScratchZXz Tux MannuAún no hay calificaciones
- Prac4 LápizDocumento7 páginasPrac4 LápizMª José BallesterAún no hay calificaciones
- Practica 1Documento4 páginasPractica 1señoraAún no hay calificaciones
- 4 2 LapizDocumento22 páginas4 2 LapizYasmani Mayta ZapanaAún no hay calificaciones
- Manual ScratchDocumento29 páginasManual ScratchDiego TorresAún no hay calificaciones
- El Entorno de Photoshop CS6Documento17 páginasEl Entorno de Photoshop CS6Ivonne YMAún no hay calificaciones
- Maestro de Midjourney: Libera tu imaginación y aprende a crear imágenes sorprendentes con Midjourney AIDe EverandMaestro de Midjourney: Libera tu imaginación y aprende a crear imágenes sorprendentes con Midjourney AIAún no hay calificaciones
- Guía de Laboratorio N°1 - ScratchDocumento27 páginasGuía de Laboratorio N°1 - ScratchHg RosmeriAún no hay calificaciones
- Scratch 01 - EntornoDocumento6 páginasScratch 01 - Entornorody puma quispeAún no hay calificaciones
- TEORIA y ACTIVIDADES Excel 4 ESO PDFDocumento14 páginasTEORIA y ACTIVIDADES Excel 4 ESO PDFLowiseAún no hay calificaciones
- Leccion 1 Pensamiento ComputacionalDocumento26 páginasLeccion 1 Pensamiento ComputacionaltellrossAún no hay calificaciones
- Guias de Aprendizajes Autonomos LenguajeDocumento5 páginasGuias de Aprendizajes Autonomos Lenguajejesús Aníbal CastroAún no hay calificaciones
- Introducción A La Programación InformáticaDocumento26 páginasIntroducción A La Programación InformáticaCarla SgrablichAún no hay calificaciones
- Guia EmprendimientoDocumento152 páginasGuia EmprendimientoAngie Cortés OrtízAún no hay calificaciones
- Practica 4 5 6 ScratchDocumento10 páginasPractica 4 5 6 Scratchingmarco72Aún no hay calificaciones
- Sesión 16 - Scratch 2.0Documento2 páginasSesión 16 - Scratch 2.0Juan Carlos Castro IngaAún no hay calificaciones
- Ejercicios BlocksCadDocumento5 páginasEjercicios BlocksCadMariano Suarez GuerreroAún no hay calificaciones
- Aprendiendo Programar Unidad 3 2021Documento12 páginasAprendiendo Programar Unidad 3 2021Luna HPAún no hay calificaciones
- Ejercicios de Telecomunicaciones - Richard Alexander Severino Morales - 2019-0791Documento3 páginasEjercicios de Telecomunicaciones - Richard Alexander Severino Morales - 2019-0791Jesus severino MedinaAún no hay calificaciones
- Jec-Proyecto Cist-Arturo Bartra GarcíaDocumento33 páginasJec-Proyecto Cist-Arturo Bartra GarcíaelvaAún no hay calificaciones
- Estrutucturas Algoritmicas RepetitivasDocumento5 páginasEstrutucturas Algoritmicas Repetitivasingmarco72Aún no hay calificaciones
- 4 Taller 1 Tecno Grado 9 Introducción A Coding For KidsDocumento9 páginas4 Taller 1 Tecno Grado 9 Introducción A Coding For KidsAugusto FernandezAún no hay calificaciones
- Taller RobomindDocumento8 páginasTaller RobomindOscar PalacioAún no hay calificaciones
- Introducción A La Programación.Documento14 páginasIntroducción A La Programación.LowiseAún no hay calificaciones
- Manual Básico de RobomidDocumento9 páginasManual Básico de RobomidLowiseAún no hay calificaciones
- Mi Taller RobomindDocumento3 páginasMi Taller RobomindbordisAún no hay calificaciones
- Manual RobomindDocumento3 páginasManual RobomindJose CaicedoAún no hay calificaciones
- Sketch UpDocumento8 páginasSketch UpcolegiosjoseAún no hay calificaciones
- Cuadernillo de Ejercicios Parte 1 7 10 PDFDocumento4 páginasCuadernillo de Ejercicios Parte 1 7 10 PDFJenifer RodriguezAún no hay calificaciones
- Práctica - 2 Guía 2 ScratchDocumento8 páginasPráctica - 2 Guía 2 ScratchMiller HernandezAún no hay calificaciones
- Guia 1 SketchupDocumento8 páginasGuia 1 SketchupSara AlvaradoAún no hay calificaciones
- Guía 01 - Entorno ScratchDocumento3 páginasGuía 01 - Entorno ScratchMiller HernandezAún no hay calificaciones
- F M GA 074 GUIAS Metodologia ScratchDocumento6 páginasF M GA 074 GUIAS Metodologia ScratchNestor JavierAún no hay calificaciones
- Cuestionario HTML5Documento5 páginasCuestionario HTML5diegoandres_22Aún no hay calificaciones
- TUTORIAL MBLOCK - CFIE - ValladolidDocumento17 páginasTUTORIAL MBLOCK - CFIE - Valladolidolivier gomezAún no hay calificaciones
- Taller 1 - Algoritmos Cualitativos - Ejercicios Tiempo IndependienteDocumento3 páginasTaller 1 - Algoritmos Cualitativos - Ejercicios Tiempo IndependienteIngryth Olivares ChassaigneAún no hay calificaciones
- Pivot Guia de UsuarioDocumento46 páginasPivot Guia de UsuarioClaudio VarasAún no hay calificaciones
- Scratch Tutorial PDFDocumento32 páginasScratch Tutorial PDFLuis Alberto TRAún no hay calificaciones
- 6Documento70 páginas6OlivaAún no hay calificaciones
- Mblock - Descripcion de BloquesDocumento24 páginasMblock - Descripcion de BloquesJeanpierre Velasquez SaldarriagaAún no hay calificaciones
- Scratch Guía BásicaDocumento24 páginasScratch Guía Básicacarlpola45Aún no hay calificaciones
- Aprende A Programar Con ScratchDocumento3 páginasAprende A Programar Con ScratchPablo Valenzuela ToledoAún no hay calificaciones
- Scratch Secundaria TrabajoDocumento5 páginasScratch Secundaria Trabajocarolina ramirezAún no hay calificaciones
- Man1 RobomindDocumento21 páginasMan1 RobomindMel TsantacruzAún no hay calificaciones
- Taller 2 AlgoritmiaDocumento34 páginasTaller 2 AlgoritmiaJHONJAIRO DE JESUS MELENDEZ RIOSAún no hay calificaciones
- Algoritmos Cuantitativos y CualitativosDocumento11 páginasAlgoritmos Cuantitativos y CualitativosAndres De La CruzAún no hay calificaciones
- PHP Formularios PracticasDocumento4 páginasPHP Formularios PracticasLalo FragosoAún no hay calificaciones
- Material de Formación 4Documento9 páginasMaterial de Formación 4Lennys Mina100% (1)
- 6 GUIA5 Interfaz de ScratchDocumento8 páginas6 GUIA5 Interfaz de Scratchhecuba73Aún no hay calificaciones
- Texto Base ScratchDocumento3 páginasTexto Base Scratchgiovana colca villegasAún no hay calificaciones
- Unidad 1 de Iniciación A La Actividad Emprendedora y Empresarial de 3º de ESO.Documento30 páginasUnidad 1 de Iniciación A La Actividad Emprendedora y Empresarial de 3º de ESO.Ylenia Figuero CastillaAún no hay calificaciones
- Pilas Bloques1Documento8 páginasPilas Bloques1Marcelo Ronaldo EsperAún no hay calificaciones
- Pensamiento-Computacional PUCP PDFDocumento2 páginasPensamiento-Computacional PUCP PDFGabriel SardonAún no hay calificaciones
- Clase 4 MblockDocumento23 páginasClase 4 MblockMaria PaulaAún no hay calificaciones
- Funcioneslogicasyanidadas 111115062931 Phpapp02Documento15 páginasFuncioneslogicasyanidadas 111115062931 Phpapp02LowiseAún no hay calificaciones
- Introducción A La Programación PDFDocumento14 páginasIntroducción A La Programación PDFLowiseAún no hay calificaciones
- Photoshop BasicDocumento44 páginasPhotoshop BasicLucas Maximiliano ParedesAún no hay calificaciones
- Guia 12 - Funcion Buscarv U BuscarhDocumento2 páginasGuia 12 - Funcion Buscarv U BuscarhLowiseAún no hay calificaciones
- Taller RobotMindDocumento8 páginasTaller RobotMindHenry PerezAún no hay calificaciones
- TEORIA y ACTIVIDADES Excel 4 ESO PDFDocumento14 páginasTEORIA y ACTIVIDADES Excel 4 ESO PDFLowiseAún no hay calificaciones
- Introducción A La Programación.Documento14 páginasIntroducción A La Programación.LowiseAún no hay calificaciones
- Tutorial RoboMindDocumento7 páginasTutorial RoboMindLowiseAún no hay calificaciones
- Manual Básico de RobomidDocumento9 páginasManual Básico de RobomidLowiseAún no hay calificaciones
- Practicas Robomind1Documento7 páginasPracticas Robomind1LowiseAún no hay calificaciones
- Practicas Robomind1Documento7 páginasPracticas Robomind1LowiseAún no hay calificaciones
- Herramienta Ofimaticas SistemasDocumento14 páginasHerramienta Ofimaticas SistemascesarAún no hay calificaciones
- Guia de Instalacion - SQL Server 2017Documento9 páginasGuia de Instalacion - SQL Server 2017carlosAún no hay calificaciones
- (Har-156) Sist. Operativo Ii (I8)Documento3 páginas(Har-156) Sist. Operativo Ii (I8)jose.svc12Aún no hay calificaciones
- WikipediaDocumento5 páginasWikipediatostitoAún no hay calificaciones
- User Guide - Pure EPON - C9500 Series - Ver - 1.02 (056-100) .En - Es PDFDocumento45 páginasUser Guide - Pure EPON - C9500 Series - Ver - 1.02 (056-100) .En - Es PDFguillermoAún no hay calificaciones
- Multiplicador 3x4Documento8 páginasMultiplicador 3x4Manuel UribeAún no hay calificaciones
- Ejercicio MACDocumento5 páginasEjercicio MACGinés SaézAún no hay calificaciones
- Configuración Del TP-Link Archer C7 VPN Client - KeepSolid VPN UnlimitedDocumento8 páginasConfiguración Del TP-Link Archer C7 VPN Client - KeepSolid VPN UnlimitedSoporte GratisAún no hay calificaciones
- Cuestionario Final Estructura de DatosDocumento14 páginasCuestionario Final Estructura de DatosLeo AcostaAún no hay calificaciones
- Evolucion de Las Plataformas Virtuales 2Documento5 páginasEvolucion de Las Plataformas Virtuales 2Salo Salomé AasAún no hay calificaciones
- Diseño y Usabilidad 1Documento7 páginasDiseño y Usabilidad 1NANCY FERNANDA LOPEZ SANDOVALAún no hay calificaciones
- 10 Dispositivos ElectronicosDocumento14 páginas10 Dispositivos ElectronicosjoseAún no hay calificaciones
- Ejemplo Aritmético Con IrvineDocumento6 páginasEjemplo Aritmético Con IrvineERICK AMADOR HERRERA VILLAGOMEZAún no hay calificaciones
- Inteligencia ArtificialDocumento8 páginasInteligencia ArtificialMaryuli Betania Vargas BorjaAún no hay calificaciones
- C1 - Comandos ADB & FastbootDocumento6 páginasC1 - Comandos ADB & FastbootTairo BonillaAún no hay calificaciones
- 6.lección Aprendida Golpe Multiplicador de TorqueDocumento1 página6.lección Aprendida Golpe Multiplicador de TorqueRichard CaicedoAún no hay calificaciones
- GUIA DE TRABAJOS PRÁCTICOS - ALED I - v2024Documento25 páginasGUIA DE TRABAJOS PRÁCTICOS - ALED I - v2024Stephanie LangoniAún no hay calificaciones
- Tarea Unidad 3 215562-Edson GranadosDocumento6 páginasTarea Unidad 3 215562-Edson Granadosedson granadosAún no hay calificaciones
- Formato de Registro - JESUSDocumento1 páginaFormato de Registro - JESUSlessenia machacca qquentaAún no hay calificaciones
- Modernizacion Refineria de Talara Petroperu, S.A.Documento58 páginasModernizacion Refineria de Talara Petroperu, S.A.miguelalmoraAún no hay calificaciones
- Manual Usuario MPE - PJDocumento92 páginasManual Usuario MPE - PJhugolenocAún no hay calificaciones
- Formato de Recoleccion Con Guia Asignada NuevoDocumento2 páginasFormato de Recoleccion Con Guia Asignada Nuevokenys castroAún no hay calificaciones
- Caracteristicas Basicas de Columnas y FilaDocumento9 páginasCaracteristicas Basicas de Columnas y FilaCarmen SandovalAún no hay calificaciones
- BRIEF Option Minería 2023 ESDocumento31 páginasBRIEF Option Minería 2023 ESFranzAún no hay calificaciones
- Informe NDocumento12 páginasInforme NJESSICA JULISSA HERMOZA HUAYLLAAún no hay calificaciones
- A9 Jarr PDFDocumento29 páginasA9 Jarr PDFMiguel López HernándezAún no hay calificaciones