También podría gustarte
- Practica Secador de TamborDocumento11 páginasPractica Secador de TamborRocio Peña100% (2)
- PROCEDIMIENTO ESCANER LASER FARO - UnlockedDocumento9 páginasPROCEDIMIENTO ESCANER LASER FARO - UnlockedVector sedeAún no hay calificaciones
- Certificado de Calibracion Estacion LeicaDocumento1 páginaCertificado de Calibracion Estacion LeicaFrancis Vidal Laguna100% (1)
- Manual Estación Total Leica PDFDocumento328 páginasManual Estación Total Leica PDFMarcoAún no hay calificaciones
- 1 Inspección de Ductos (Por Drone) en Instalaciones PetrolerasDocumento14 páginas1 Inspección de Ductos (Por Drone) en Instalaciones Petrolerasjuanito2076Aún no hay calificaciones
- Metodologia para Descargar Efemérides GNSSDocumento9 páginasMetodologia para Descargar Efemérides GNSSFranzWolfHeart100% (1)
- Acta de Audiencia PreliminarDocumento6 páginasActa de Audiencia PreliminarYann gustavo Coaguila ArenasAún no hay calificaciones
- Ejercicios EOQDocumento6 páginasEjercicios EOQFreddy ContrerasAún no hay calificaciones
- Pescantes Giratorios y Orientables Murales y de Columna: Del Programa de Grúas DemagDocumento30 páginasPescantes Giratorios y Orientables Murales y de Columna: Del Programa de Grúas DemagCastiillo EduardoAún no hay calificaciones
- Trimble 3600drDocumento2 páginasTrimble 3600drLilith LanderosAún no hay calificaciones
- Ficha Técnica Torre Arriostrada PSR STZ30G Galvanizada Por Inmersión en Caliente Hasta 30 Mts de Altura PDFDocumento1 páginaFicha Técnica Torre Arriostrada PSR STZ30G Galvanizada Por Inmersión en Caliente Hasta 30 Mts de Altura PDFRobertoHerediaJacoboAún no hay calificaciones
- Trabajo LIDARDocumento14 páginasTrabajo LIDARJenny AlvarezAún no hay calificaciones
- Catalogo Caballero Tecnologico Julio 2016Documento192 páginasCatalogo Caballero Tecnologico Julio 2016ginneth22Aún no hay calificaciones
- Comprender La Solución PPK y Analizar Registros Desde ReachDocumento9 páginasComprender La Solución PPK y Analizar Registros Desde ReachNATALIA ANDREA BEDOYA HERRERAAún no hay calificaciones
- 12 - AFICHE CURSO DE FOTOGRAMETRIA CON P4RTK y P4PRO AQPDocumento1 página12 - AFICHE CURSO DE FOTOGRAMETRIA CON P4RTK y P4PRO AQPJuanCarlosChoqueNavarroAún no hay calificaciones
- CLAVES DESCRIPTIVAS en El Plano de Civil 3d para Ingenieros CivilesDocumento12 páginasCLAVES DESCRIPTIVAS en El Plano de Civil 3d para Ingenieros Civilesdaniel legonia100% (1)
- Inventario de Topografía 1Documento3 páginasInventario de Topografía 1FK FGAún no hay calificaciones
- Alquiler de GPS Trimble Base y RoverDocumento1 páginaAlquiler de GPS Trimble Base y Roveralberto montesAún no hay calificaciones
- Cosechador de CarbonDocumento3 páginasCosechador de CarbonLuisMezaGonzalesAún no hay calificaciones
- Plancha Acero NegroDocumento1 páginaPlancha Acero NegroJuan Carlos Muñante De La CruzAún no hay calificaciones
- Liberacion de Control Topografico - Consorcio Ejecutor RecuayDocumento2 páginasLiberacion de Control Topografico - Consorcio Ejecutor RecuayAntony Bermudez ramirezAún no hay calificaciones
- Precios - Topografía PDFDocumento10 páginasPrecios - Topografía PDFMarco QuispeAún no hay calificaciones
- Levantamiento Geodesico (Geodesia)Documento15 páginasLevantamiento Geodesico (Geodesia)Charles SucariAún no hay calificaciones
- Convertir Coordenadas Geograficas Wgs84 A UTM en Civil3dDocumento4 páginasConvertir Coordenadas Geograficas Wgs84 A UTM en Civil3dClaudionei KaulAún no hay calificaciones
- 26280-220-V11-Va30-00847 - R1 Procedimiento Trazo y Replanteo TopograficoDocumento12 páginas26280-220-V11-Va30-00847 - R1 Procedimiento Trazo y Replanteo TopograficoVasquez HeiderAún no hay calificaciones
- Propiedades UTMDocumento1 páginaPropiedades UTMMeri NebedaAún no hay calificaciones
- HYPACKDocumento1598 páginasHYPACKAndres Ochoa100% (1)
- BulonesDocumento1 páginaBulonesasaixAún no hay calificaciones
- La Flaca y El GordoDocumento26 páginasLa Flaca y El GordoAlan Segovia RojasAún no hay calificaciones
- Ingeografos - Transformación de Coordenadas UTM - Psad56 A Wgs84 y VisceversaDocumento4 páginasIngeografos - Transformación de Coordenadas UTM - Psad56 A Wgs84 y VisceversaRory Cristian Cordero RojoAún no hay calificaciones
- Verificación y Correcciones Estación TotalDocumento8 páginasVerificación y Correcciones Estación TotalJuliocross017Aún no hay calificaciones
- Topcon Es 105Documento2 páginasTopcon Es 105ronalpc85Aún no hay calificaciones
- Códigos Generales Torno CNCDocumento2 páginasCódigos Generales Torno CNCalexisAún no hay calificaciones
- Gnss GpsDocumento71 páginasGnss GpsEnrique ChAún no hay calificaciones
- ST10201004.TOP - pr.001-F02 - Rev0 - Control de Calibracion Receptor GPSDocumento2 páginasST10201004.TOP - pr.001-F02 - Rev0 - Control de Calibracion Receptor GPSmaryori evelyn coarita espinozaAún no hay calificaciones
- S900a Modificado Final Brochure EspDocumento4 páginasS900a Modificado Final Brochure Espiand26100% (1)
- 3.-Dibujo Técnico - Tipos de Línea, Grosores y Usos - MVBlogMVBlogDocumento9 páginas3.-Dibujo Técnico - Tipos de Línea, Grosores y Usos - MVBlogMVBlogkasjdka100% (1)
- Transformacion de Coordenadas UTM Topograficas...Documento15 páginasTransformacion de Coordenadas UTM Topograficas...Anonymous U2pRLpyd0% (1)
- Manual Practicas de Topografia SubterraneaDocumento13 páginasManual Practicas de Topografia SubterraneaazazelkazdayaAún no hay calificaciones
- Certificado de Calibracion ET y NivelDocumento14 páginasCertificado de Calibracion ET y NivelWilliam Luis PazAún no hay calificaciones
- Plano IsometricoDocumento2 páginasPlano IsometricoLuis Miguel Ochoa TapiaAún no hay calificaciones
- Medicion RTK SP80Documento9 páginasMedicion RTK SP80Leonardo MolinaAún no hay calificaciones
- Insertar Superficies de Google Earth A AutoCAD Civil 3D 2017 PDFDocumento10 páginasInsertar Superficies de Google Earth A AutoCAD Civil 3D 2017 PDFAlejandraAún no hay calificaciones
- Estacion Total Sin CorregirDocumento24 páginasEstacion Total Sin CorregirROGER PEREZ GUEVARAAún no hay calificaciones
- Manual de Soldadura Tomo 2Documento233 páginasManual de Soldadura Tomo 2Oscar GuayanaAún no hay calificaciones
- Cantidad de SoldaduraDocumento2 páginasCantidad de SoldaduraLuis Alejandro Amante SantanaAún no hay calificaciones
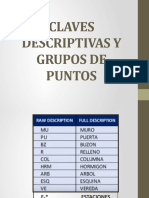
- Codigo de Puntos TopografiaDocumento7 páginasCodigo de Puntos TopografiaEduardoNavarroAún no hay calificaciones
- CPC-S03 2023Documento27 páginasCPC-S03 2023ANTONY YONI ANCCO HUACCACHIAún no hay calificaciones
- Informe AgisoftDocumento7 páginasInforme Agisoftsebastian tejadaAún no hay calificaciones
- Ficha Tecnica Power Max 105Documento4 páginasFicha Tecnica Power Max 105Luis Enrique Cervantes Gomez100% (1)
- ChaveterosDocumento1 páginaChaveterospitcabAún no hay calificaciones
- Curso UTM-Peru PDFDocumento57 páginasCurso UTM-Peru PDFRoberto EAún no hay calificaciones
- GeodesiaDocumento22 páginasGeodesiaCleder VenturaAún no hay calificaciones
- Topografia Plana Leonardo CasanovaDocumento45 páginasTopografia Plana Leonardo CasanovaOtter SWAún no hay calificaciones
- Practica 7 Escaner 3DDocumento13 páginasPractica 7 Escaner 3DLuis MiguelAún no hay calificaciones
- Escaner 3 DDocumento9 páginasEscaner 3 DDavid MartinezAún no hay calificaciones
- Escaner 3DDocumento4 páginasEscaner 3DJulian Ortiz100% (1)
- Laser Esacner 3D Topografia..Documento12 páginasLaser Esacner 3D Topografia..Marco Antonio Espinoza100% (1)
- Informe Escanner 3DDocumento13 páginasInforme Escanner 3DMary PumashuntaAún no hay calificaciones
- Practica 5 ScannerDocumento11 páginasPractica 5 ScannerMax ChiluisaAún no hay calificaciones
- Marco TeoricoDocumento4 páginasMarco TeoricoSebas Jimenez MAún no hay calificaciones
- Escaner 3D y Nube de PuntosDocumento9 páginasEscaner 3D y Nube de PuntosSarella Garcia LlantoAún no hay calificaciones
- Resumen M2Documento17 páginasResumen M2Valentina RoaAún no hay calificaciones
- Instrucciones para Configurar Emails Con Nuevo Servidor de La Forma Segura PDFDocumento3 páginasInstrucciones para Configurar Emails Con Nuevo Servidor de La Forma Segura PDFCristian RodriguezAún no hay calificaciones
- Fresadora CNC 5 Ejes FlexCinco Industrias Viwa1 GRDocumento1 páginaFresadora CNC 5 Ejes FlexCinco Industrias Viwa1 GRCristian RodriguezAún no hay calificaciones
- VectorizaciónDocumento15 páginasVectorizaciónCristian RodriguezAún no hay calificaciones
- Interpolacion LinealDocumento32 páginasInterpolacion LinealCristian RodriguezAún no hay calificaciones
- Interpolacion Lineal Coordenadas Absolutas y RelativasDocumento5 páginasInterpolacion Lineal Coordenadas Absolutas y RelativasCristian RodriguezAún no hay calificaciones
- Caso Practico RodriguezDocumento4 páginasCaso Practico RodriguezCristian RodriguezAún no hay calificaciones
- Ejercicios Unidad I Sistemas de Control Capitulo IDocumento9 páginasEjercicios Unidad I Sistemas de Control Capitulo ICristian RodriguezAún no hay calificaciones
- Informe # 7 Uso Del Escaner 3dDocumento12 páginasInforme # 7 Uso Del Escaner 3dCristian RodriguezAún no hay calificaciones
- Fasss de Cambio EjemploDocumento12 páginasFasss de Cambio EjemploMarcia ortegaAún no hay calificaciones
- Recurso UnicaribeDocumento9 páginasRecurso UnicaribeJeancarlos Barrientos LluberesAún no hay calificaciones
- TareajesusDocumento6 páginasTareajesusYuliana SánchezAún no hay calificaciones
- CCECC P21 CHL SEG 0001 Cumplimiento SSOMA ProveedorDocumento1 páginaCCECC P21 CHL SEG 0001 Cumplimiento SSOMA ProveedorjoseAún no hay calificaciones
- Planeación de Requerimientos de Materiales IIDocumento5 páginasPlaneación de Requerimientos de Materiales IIJOEL DIAZ CRUZAún no hay calificaciones
- QuesosDocumento77 páginasQuesosManuel Partida100% (1)
- CarteraDocumento18 páginasCarterakaren uscateguiAún no hay calificaciones
- Estrategia de Push y PullDocumento4 páginasEstrategia de Push y PullAriana Méndez SotaAún no hay calificaciones
- Carta de Exposición de Motivos: Querétaro, Qro A 30 de Marzo Del 2023Documento2 páginasCarta de Exposición de Motivos: Querétaro, Qro A 30 de Marzo Del 2023Naomi CruzAún no hay calificaciones
- Grupo Amanchaq-Exposicion Contrato de ArrendamientoDocumento16 páginasGrupo Amanchaq-Exposicion Contrato de ArrendamientoMARTHA ELENA RUIZ ROMANIAún no hay calificaciones
- Plan de Trabajo Ems - Local ComunalDocumento15 páginasPlan de Trabajo Ems - Local Comunalsegundovalentinch50Aún no hay calificaciones
- Esquema Del Proceso Ordinario LaboralDocumento12 páginasEsquema Del Proceso Ordinario LaboralSusy Arenas de Cortez100% (1)
- Libro AlasDocumento436 páginasLibro AlasJAIME GARRIDOAún no hay calificaciones
- Ejercicios - Seleccion - Inversiones - TALLERDocumento3 páginasEjercicios - Seleccion - Inversiones - TALLERCamilo RuedaAún no hay calificaciones
- Activos PDFDocumento35 páginasActivos PDF72034430Aún no hay calificaciones
- Infografia HaydeelisE.Documento6 páginasInfografia HaydeelisE.HaydeelisAún no hay calificaciones
- Procedimiento de Mantenimiento de MotorDocumento3 páginasProcedimiento de Mantenimiento de MotorCamilaMuñozCajoAún no hay calificaciones
- Etapas de Proceso de Expansión InternacionalDocumento7 páginasEtapas de Proceso de Expansión InternacionalNancy PintoAún no hay calificaciones
- Planta de Manufactura de CobreDocumento10 páginasPlanta de Manufactura de CobreJessi Sa100% (1)
- Clasificacion de BombasDocumento31 páginasClasificacion de BombasRonnyAún no hay calificaciones
- Acta SIMOPSDocumento8 páginasActa SIMOPSLindaAún no hay calificaciones
- Manipulación Segura Del Extinguidor de FuegoDocumento2 páginasManipulación Segura Del Extinguidor de FuegoHector GonzalezAún no hay calificaciones
- El Consumo de FrutasDocumento4 páginasEl Consumo de Frutaslisbeth sarai ramos ortegaAún no hay calificaciones
- CEMENTERIODocumento1 páginaCEMENTERIOSandroCastroAtaoAún no hay calificaciones
- Anexo 4 - Proyecto QuellavecoDocumento1 páginaAnexo 4 - Proyecto QuellavecoRosa Ramos0% (1)
- Actividad EntregableDocumento11 páginasActividad EntregableRhonny NaverosAún no hay calificaciones
- Ciclo de Gestión Del MedicamentoDocumento10 páginasCiclo de Gestión Del MedicamentoBianca FortiniAún no hay calificaciones