También podría gustarte
- Ejercicios Dirigidos de Electroneumatica 20201Documento6 páginasEjercicios Dirigidos de Electroneumatica 20201Vanessa DomínguezAún no hay calificaciones
- Temporizadores On Delay y Off DelayDocumento3 páginasTemporizadores On Delay y Off DelayutezmgcAún no hay calificaciones
- Tarea Metodos Cascada y Paso A PasoDocumento6 páginasTarea Metodos Cascada y Paso A PasoDante DldAún no hay calificaciones
- Circuito ElectroneumaticoDocumento6 páginasCircuito ElectroneumaticoRonaldo Chiche SurcoAún no hay calificaciones
- Diseño de Sistema Electroneumático Básico para El Control Del Vaciado de Materiales A Granel en Una TolvaDocumento6 páginasDiseño de Sistema Electroneumático Básico para El Control Del Vaciado de Materiales A Granel en Una TolvaJuanje TLAún no hay calificaciones
- Guia Laboratorio04Documento4 páginasGuia Laboratorio04Fredy Copa VillalbaAún no hay calificaciones
- Practica 7Documento13 páginasPractica 7Damaris TalaveraAún no hay calificaciones
- Manual Fluid SimDocumento0 páginasManual Fluid SimSuray RezaAún no hay calificaciones
- Ejercicio 2 Prensa para TapasDocumento7 páginasEjercicio 2 Prensa para TapasJose CabalAún no hay calificaciones
- Taladradora Escariadora NeumaticaDocumento18 páginasTaladradora Escariadora NeumaticaeugenioAún no hay calificaciones
- METODO PASO A PASO ElectroneumáticaDocumento7 páginasMETODO PASO A PASO ElectroneumáticaVictor Jesús Aguirre AvilesAún no hay calificaciones
- Automatización Neumática PuraDocumento52 páginasAutomatización Neumática PuraMAURICIO100% (1)
- Soluciones Materiales FerrososDocumento3 páginasSoluciones Materiales FerrososproggerAún no hay calificaciones
- Ejercicios de Neumatica 2018Documento8 páginasEjercicios de Neumatica 2018Ortega Cárdenas Cristian NoéAún no hay calificaciones
- Problema Con 3 CilindrosDocumento4 páginasProblema Con 3 CilindrosYered TC0% (1)
- Practica N°1 de ComputacionalDocumento10 páginasPractica N°1 de ComputacionalcarlosAún no hay calificaciones
- Eslabonamiento de Cuatro BarrasDocumento17 páginasEslabonamiento de Cuatro BarrasAndres PeñalozaAún no hay calificaciones
- Análisis de Circuitos NeumáticosDocumento4 páginasAnálisis de Circuitos Neumáticosqwertyu123Aún no hay calificaciones
- SIERRADocumento1 páginaSIERRAJovani DiazAún no hay calificaciones
- Practica 4 PDFDocumento3 páginasPractica 4 PDFMupiigAún no hay calificaciones
- Ciclo Combinado Secuencial de Tres CilindrosDocumento4 páginasCiclo Combinado Secuencial de Tres CilindrosAndree De la CruzAún no hay calificaciones
- Informe 2 Final en ProcesoDocumento12 páginasInforme 2 Final en ProcesobassAún no hay calificaciones
- Automatizacion NeumaticaDocumento26 páginasAutomatizacion NeumaticaBrian Lopez100% (1)
- Practicas 1 - 8 - ElectroneumaticaDocumento15 páginasPracticas 1 - 8 - ElectroneumaticaMarco Vinicio DjAún no hay calificaciones
- Ejercicios Con SensoresDocumento5 páginasEjercicios Con Sensoresisobaric1000Aún no hay calificaciones
- Actividad 1 LEOHDocumento5 páginasActividad 1 LEOHLuis Enrique OlveraAún no hay calificaciones
- Mecanica Computacional 2 Lab 6 (Individual)Documento9 páginasMecanica Computacional 2 Lab 6 (Individual)Fredy Copa VillalbaAún no hay calificaciones
- Ejercicios Neumatica EtitcDocumento5 páginasEjercicios Neumatica Etitcvictor moraAún no hay calificaciones
- 8 Circuitos Con ElectrovalvulasDocumento14 páginas8 Circuitos Con ElectrovalvulasLuis EstebanAún no hay calificaciones
- Acero Salazar Bryan Javier - Presentacion - Esquemas de Circuitos y Sistema Hidraulicos y Neumaticos - Hidraulica y Neumatica - 3154Documento38 páginasAcero Salazar Bryan Javier - Presentacion - Esquemas de Circuitos y Sistema Hidraulicos y Neumaticos - Hidraulica y Neumatica - 3154Bryan AceroAún no hay calificaciones
- Válvula de SecuenciaDocumento1 páginaVálvula de SecuenciaEgroj LuisAún no hay calificaciones
- ITT - Ejercicios ElectroNeumatica Avanzada v2Documento8 páginasITT - Ejercicios ElectroNeumatica Avanzada v2Ulises Ornelas RodriguezAún no hay calificaciones
- Ejemplos de Programación LadderDocumento6 páginasEjemplos de Programación Laddercarloshugolety100% (1)
- Ejercicios Propuestos de Neumatica Metodo Cascada y Paso A PasoDocumento2 páginasEjercicios Propuestos de Neumatica Metodo Cascada y Paso A PasoRodrigo CastroAún no hay calificaciones
- Actividades 1ºDocumento30 páginasActividades 1ºHola buenas0% (2)
- Ejercicios de PLC RelevaciónDocumento4 páginasEjercicios de PLC RelevaciónSaulCastilloAún no hay calificaciones
- Electroneumatica (Metodo de Cascada)Documento8 páginasElectroneumatica (Metodo de Cascada)Myrian NacedAún no hay calificaciones
- Guia 4Documento9 páginasGuia 4edisonAún no hay calificaciones
- Informe Laboratorio de NeumáticaDocumento9 páginasInforme Laboratorio de NeumáticaGiovanny PovedaAún no hay calificaciones
- Ejercicio 2Documento6 páginasEjercicio 2Jaime MuñozAún no hay calificaciones
- Informe 4 Mandos SecuencialesDocumento10 páginasInforme 4 Mandos Secuencialesmarix120% (2)
- Calculo de Fusibles y GuardamotoresDocumento17 páginasCalculo de Fusibles y Guardamotoresalejandro govea martinez0% (1)
- 2do Trabajo Sist. ElectrohidraulicosDocumento4 páginas2do Trabajo Sist. ElectrohidraulicosNelson Fretel AlcantaraAún no hay calificaciones
- Taller Técnica Paso A PasoDocumento2 páginasTaller Técnica Paso A PasoCARLOS ALBERTO BAICUE100% (1)
- Arranque, Protección y Control de MotoresDocumento49 páginasArranque, Protección y Control de MotoresnanaidiazAún no hay calificaciones
- Metodo de La Cascada Inf 01Documento8 páginasMetodo de La Cascada Inf 01Diego AnaluisaAún no hay calificaciones
- RelacionDocumento6 páginasRelacionJosse Luis Q. PomaAún no hay calificaciones
- Usando Solo Enclavamiento Usar El Diagrama Ladder para Accionar Una Lámpara H2Documento4 páginasUsando Solo Enclavamiento Usar El Diagrama Ladder para Accionar Una Lámpara H2Raquelita Huaman CuriAún no hay calificaciones
- Formulario Ejes Leccion 3Documento5 páginasFormulario Ejes Leccion 3Kevin VGAún no hay calificaciones
- Guias Cei p5Documento7 páginasGuias Cei p5Emmanuel AlvizAún no hay calificaciones
- Ejercicio de Neumatica y ElectroneumaticaDocumento1 páginaEjercicio de Neumatica y ElectroneumaticaCesar Enrique Rivera BermudezAún no hay calificaciones
- SprocketsDocumento18 páginasSprocketsFredi Isai Angeles MirandaAún no hay calificaciones
- Ejercicios de Diseño de Ejes PDFDocumento14 páginasEjercicios de Diseño de Ejes PDFFabricio JosuéAún no hay calificaciones
- Ejercicios EngranajesDocumento20 páginasEjercicios EngranajesDavid852hzAún no hay calificaciones
- Act 2 DinamicaDocumento8 páginasAct 2 DinamicaRamiro AlmzAún no hay calificaciones
- 3.2 Desarollo de Circuitos ElectroneumaticosDocumento22 páginas3.2 Desarollo de Circuitos ElectroneumaticosFreddyOscoAún no hay calificaciones
- Practica - Funcionamiento Electroneumatico de Brazo RobotDocumento22 páginasPractica - Funcionamiento Electroneumatico de Brazo RobotMax GaAún no hay calificaciones
- Circuitos Hidraulicos y Neumaticos - 3Documento17 páginasCircuitos Hidraulicos y Neumaticos - 3AldoyGloria CorredoresAún no hay calificaciones
- Practica de ElectroneumaicaDocumento14 páginasPractica de ElectroneumaicaEdgar Hernandez ArrietaAún no hay calificaciones
- Circuitos Electrohidraulicos y ElectroneumaticosDocumento13 páginasCircuitos Electrohidraulicos y Electroneumaticosamin513Aún no hay calificaciones
- Bioética Clínica-1Documento20 páginasBioética Clínica-1JesúsDavidGonzálezCastañedaAún no hay calificaciones
- Contrato de NoviazgoDocumento3 páginasContrato de NoviazgoJesúsDavidGonzálezCastañeda54% (24)
- Crecimientos Del MaxilarDocumento7 páginasCrecimientos Del MaxilarJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Estandarización de RecetasDocumento8 páginasEstandarización de RecetasJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Practica2 T1 Eq1 CPBDocumento31 páginasPractica2 T1 Eq1 CPBJesúsDavidGonzálezCastañedaAún no hay calificaciones
- HidráulicaDocumento29 páginasHidráulicaJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Aceites y GrasasDocumento15 páginasAceites y GrasasJesúsDavidGonzálezCastañedaAún no hay calificaciones
- HidráulicaDocumento3 páginasHidráulicaJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Vibraciones EjerciciosDocumento37 páginasVibraciones EjerciciosJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Aceites y GrasasDocumento8 páginasAceites y GrasasJesúsDavidGonzálezCastañeda0% (1)
- SMAEDocumento18 páginasSMAEJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Seguridad AlimentariaDocumento6 páginasSeguridad AlimentariaJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Variables MagnéticasDocumento7 páginasVariables MagnéticasJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Vehículo de OrugaDocumento7 páginasVehículo de OrugaJesúsDavidGonzálezCastañedaAún no hay calificaciones
- Tesis Jhon Jairo López Rojas - Colegiatura 2 PDFDocumento93 páginasTesis Jhon Jairo López Rojas - Colegiatura 2 PDFJhon Jairo López RojasAún no hay calificaciones
- Dientes Rojos - Jesús CañadasDocumento405 páginasDientes Rojos - Jesús CañadasJessica BasantesAún no hay calificaciones
- Cohen Martin - 101 Dilemas Eticos PDFDocumento465 páginasCohen Martin - 101 Dilemas Eticos PDFNicolas ignacioAún no hay calificaciones
- Ardoino Et Al 2008 Brucelosis Canina PDFDocumento12 páginasArdoino Et Al 2008 Brucelosis Canina PDFNath BixoAún no hay calificaciones
- 10 Clase Abdomen Jesofago Estomago USJB 2020-2Documento65 páginas10 Clase Abdomen Jesofago Estomago USJB 2020-2Nicolás QuintanillaAún no hay calificaciones
- Preoperacional Sierra CircularDocumento1 páginaPreoperacional Sierra CircularLkn TabordaAún no hay calificaciones
- Atención Inmediata Del Recién Nacido - 2015Documento39 páginasAtención Inmediata Del Recién Nacido - 2015Cielo QuispeAún no hay calificaciones
- ACFrOgDL-Qjsc70TmUDEJc9Ob3xGYTPtF yjMiysqp2vg6NgUrr5Oip5XVe9aUf7gQWKc7mffuS5-bodO8VquAV1JKhujgsSKTIaDmyIHOBf4TeXOaQjYzK0dZS PX6nkrecfkgRmYCVoJG8UelXDocumento6 páginasACFrOgDL-Qjsc70TmUDEJc9Ob3xGYTPtF yjMiysqp2vg6NgUrr5Oip5XVe9aUf7gQWKc7mffuS5-bodO8VquAV1JKhujgsSKTIaDmyIHOBf4TeXOaQjYzK0dZS PX6nkrecfkgRmYCVoJG8UelXcarlosAún no hay calificaciones
- Metodos de Explotacion Shrinkage StopingDocumento2 páginasMetodos de Explotacion Shrinkage StopingMathias SebastianAún no hay calificaciones
- Psicología y Chamanismo en Diálogo IIDocumento20 páginasPsicología y Chamanismo en Diálogo IIchukydosAún no hay calificaciones
- Practica 7 - Sintesis de AcetanilidaDocumento4 páginasPractica 7 - Sintesis de Acetanilidabryan JavierAún no hay calificaciones
- Doihipbhq2ihnsm1eift Signature Poli 170401213110Documento171 páginasDoihipbhq2ihnsm1eift Signature Poli 170401213110Dario CaparròzAún no hay calificaciones
- Tdii Tema 1Documento50 páginasTdii Tema 1Mario Eduardo Diaz GallardoAún no hay calificaciones
- TODODocumento84 páginasTODOFabian MiñoAún no hay calificaciones
- Tabla Comparativa de DiuréticosDocumento7 páginasTabla Comparativa de DiuréticosLaila Anayancy Padilla Sereno100% (1)
- Terapia Respiración Bucal 2017Documento36 páginasTerapia Respiración Bucal 2017Robert Russ ZamoraAún no hay calificaciones
- Navidad y SaturnaliaDocumento6 páginasNavidad y SaturnaliaOmar CardenasAún no hay calificaciones
- Taller Procesos de ProducciónDocumento3 páginasTaller Procesos de ProducciónKAREN NAYELHI RAYO RAYOAún no hay calificaciones
- Formulario de Traslado de Mercancía: TransportistaDocumento1 páginaFormulario de Traslado de Mercancía: TransportistaYamileth MartinezAún no hay calificaciones
- Alquinga Villafuerte Josselyn AlexandraDocumento146 páginasAlquinga Villafuerte Josselyn AlexandraJennizzen OrellanaAún no hay calificaciones
- Taller CarbohidratosDocumento2 páginasTaller Carbohidratosnaria perezAún no hay calificaciones
- PL - Directorio Digital 1Documento49 páginasPL - Directorio Digital 1jSOTOAún no hay calificaciones
- Biologos (As) y Sus Aportes A La HumanidadDocumento1 páginaBiologos (As) y Sus Aportes A La HumanidadMARIA ALANOCA50% (2)
- Guia Season 4 UwU CafeDocumento68 páginasGuia Season 4 UwU CafeJosepth Valentino VillanuevaAún no hay calificaciones
- M4 - S16 - Competencia 3 Diseña y Construye Soluciones TecnológicasDocumento12 páginasM4 - S16 - Competencia 3 Diseña y Construye Soluciones TecnológicasBibiano Alcarraz CarbajalAún no hay calificaciones
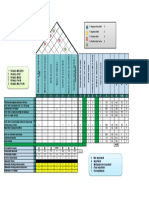
- Casa de La Calidad QDF MicehllDocumento1 páginaCasa de La Calidad QDF Micehllfer ChirinosAún no hay calificaciones
- Memoria Descriptiva AcabadosDocumento10 páginasMemoria Descriptiva AcabadosfAún no hay calificaciones
- Cuento ThorDocumento10 páginasCuento Thorpminjares02Aún no hay calificaciones
- Materia SecaDocumento12 páginasMateria SecaIsmael Alessandro Peña CoronadoAún no hay calificaciones
- Triptico de Termica - Motores DieselDocumento2 páginasTriptico de Termica - Motores Dieselwentworth_vpAún no hay calificaciones