También podría gustarte
- Practica Resuelta #1Documento52 páginasPractica Resuelta #1Agustin Machaca100% (3)
- Ejercicios Resueltos Transf ZDocumento9 páginasEjercicios Resueltos Transf ZJuano Inga Ortega62% (13)
- Armónicas en Sistemas Eléctricos IndustrialesDe EverandArmónicas en Sistemas Eléctricos IndustrialesCalificación: 4.5 de 5 estrellas4.5/5 (12)
- Ejercicios Espacio de EstadoDocumento7 páginasEjercicios Espacio de EstadoJonathan ArauzAún no hay calificaciones
- Solucionario de Sistemas de Control IDocumento41 páginasSolucionario de Sistemas de Control IRaul Roque Yujra0% (1)
- Ejercicios Resueltos Diagrama de BloquesDocumento33 páginasEjercicios Resueltos Diagrama de BloquesAl GC76% (17)
- B-2-8. Obtenga Una Representación en El Espacio de Estados Del Sistema de LaDocumento2 páginasB-2-8. Obtenga Una Representación en El Espacio de Estados Del Sistema de LaGisela LázaroAún no hay calificaciones
- Problemas resueltos de Hidráulica de CanalesDe EverandProblemas resueltos de Hidráulica de CanalesCalificación: 4.5 de 5 estrellas4.5/5 (7)
- Teoria de Control Clasica (Ejercicios Resueltos)Documento182 páginasTeoria de Control Clasica (Ejercicios Resueltos)Gregory Cárdenas-Mansilla92% (39)
- Control PID de Posición Angular de Un Motor DCDocumento11 páginasControl PID de Posición Angular de Un Motor DCDaniel Santiago Cuervo Gómez100% (1)
- Ogatasol 2Documento51 páginasOgatasol 2Emiliano SegovianoAún no hay calificaciones
- Solucionario - Sistemas de Control en Tiempo Discreto - Katsuhiko Ogata - 2ed PDFDocumento201 páginasSolucionario - Sistemas de Control en Tiempo Discreto - Katsuhiko Ogata - 2ed PDFJ Alberto Garcia33% (6)
- Analisis de Circuitos Con LaplaceDocumento47 páginasAnalisis de Circuitos Con Laplacegabriel olivas80% (5)
- Proceso Administrativo (3342) Tarea 16Documento14 páginasProceso Administrativo (3342) Tarea 16Karen ZambranoAún no hay calificaciones
- Tema 5 Bloques Funcionales de Sistemas MecanicosDocumento25 páginasTema 5 Bloques Funcionales de Sistemas Mecanicosalejandro martinez zanattaAún no hay calificaciones
- Ejemplos de Diagramas de BodeDocumento4 páginasEjemplos de Diagramas de BodeLeslie Mardones Muñoz100% (2)
- Problemas Corte 1Documento20 páginasProblemas Corte 1juan ferreiraAún no hay calificaciones
- Dinámica de Sistemas Físicos-Ejercicios ResueltosDocumento19 páginasDinámica de Sistemas Físicos-Ejercicios ResueltosJUAN4201Aún no hay calificaciones
- Ejercicion1-22 Amplificadores de Potencia PDFDocumento11 páginasEjercicion1-22 Amplificadores de Potencia PDFBrayanGarcíaAún no hay calificaciones
- Ejercicios Controladores PidDocumento71 páginasEjercicios Controladores PidJosue Tuz Poot100% (2)
- Circuito Integrador y DerivadorDocumento3 páginasCircuito Integrador y DerivadorjaberysAún no hay calificaciones
- Ejemplos Lugar Geométrico de Las RaicesDocumento22 páginasEjemplos Lugar Geométrico de Las RaiceshaguilarAún no hay calificaciones
- Marketing Mix MigurtDocumento24 páginasMarketing Mix MigurtAudemar Ruiz67% (3)
- Evaluacion de AutocadDocumento3 páginasEvaluacion de AutocadZail Andia JaureguiAún no hay calificaciones
- Farmacogenómica y PsiquiatríaDocumento3 páginasFarmacogenómica y Psiquiatríajuan pabloAún no hay calificaciones
- Capítulo #2 Modelado Matemático de Sistemas de ControlDocumento76 páginasCapítulo #2 Modelado Matemático de Sistemas de ControlHector Vergara100% (3)
- Función de Transferencia (Motor Ac y Opamp)Documento4 páginasFunción de Transferencia (Motor Ac y Opamp)Sergio Serquen100% (1)
- Ejercicios de Diagramas de Flujo de Senal y Formula de Mason PDFDocumento12 páginasEjercicios de Diagramas de Flujo de Senal y Formula de Mason PDFLuisAún no hay calificaciones
- Grafo de Flujo de Señal de MasonDocumento17 páginasGrafo de Flujo de Señal de MasonMarco100% (1)
- Actividades Control de ProcesosDocumento26 páginasActividades Control de ProcesosDaniel PalaciosAún no hay calificaciones
- Analisis de Sistemas en El Espacio de Estados.Documento7 páginasAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Ma3002 Transformada Z Inversa Ejemplos PDFDocumento13 páginasMa3002 Transformada Z Inversa Ejemplos PDFGarra Crema Stone100% (1)
- PWM EjerciciosDocumento3 páginasPWM EjerciciosAxel AlmeidaAún no hay calificaciones
- Filtros Segundo OrdenDocumento4 páginasFiltros Segundo OrdenlfernandaceAún no hay calificaciones
- Funcion de Transferencia RLCDocumento10 páginasFuncion de Transferencia RLCnomancheselpisoAún no hay calificaciones
- Reglas para La Construcción Del Lugar de Raíces de Un SistemaDocumento5 páginasReglas para La Construcción Del Lugar de Raíces de Un Sistemamdonnet9Aún no hay calificaciones
- Trabajo de Electronicos I-Cap6Documento28 páginasTrabajo de Electronicos I-Cap6Fernando Frias CabrejosAún no hay calificaciones
- Ejercicios Sobre La Regla de MasonDocumento3 páginasEjercicios Sobre La Regla de MasonOscar Portillo100% (1)
- Analogia Fuerza CorrienteDocumento2 páginasAnalogia Fuerza CorrienteJuan K PeñaAún no hay calificaciones
- Ejercicios Resonancia PDFDocumento8 páginasEjercicios Resonancia PDFAlexander Paucar MateoAún no hay calificaciones
- Semiconvertidor MonofasicoDocumento23 páginasSemiconvertidor MonofasicoPablo Enrique50% (2)
- Problemas Control Moderno Resuelto (Discreto)Documento11 páginasProblemas Control Moderno Resuelto (Discreto)Karol SaenzAún no hay calificaciones
- Sesión N°2 - Transformada ZDocumento34 páginasSesión N°2 - Transformada ZCarlos AndrésAún no hay calificaciones
- Aaa Ecuaciones Diferenciales TerminadoDocumento19 páginasAaa Ecuaciones Diferenciales TerminadoAdrian Bailon Mamani MachacaAún no hay calificaciones
- Control Temperatura On - OffDocumento17 páginasControl Temperatura On - OffGustavo OrtizAún no hay calificaciones
- Respuestas Ejercicios Tema 6Documento10 páginasRespuestas Ejercicios Tema 6Pascual MaféAún no hay calificaciones
- Ingenieria ElectronicaDocumento18 páginasIngenieria ElectronicaJimmie Valverde MontalvoAún no hay calificaciones
- Trabajo Final ElectromecanicaDocumento19 páginasTrabajo Final ElectromecanicaJesse MauricioAún no hay calificaciones
- ARE 2021 PAO1 Homework 2Documento7 páginasARE 2021 PAO1 Homework 2Jose andresAún no hay calificaciones
- Circuito RC ModeladoDocumento4 páginasCircuito RC ModeladoGuillermo MartinezAún no hay calificaciones
- Informe 1 Sistemas DinamicosDocumento14 páginasInforme 1 Sistemas DinamicosRichard Eduardo Duarte ZuñigaAún no hay calificaciones
- Diseño de Sistemas Reguladores ObservaDocumento22 páginasDiseño de Sistemas Reguladores ObservaJean Pierre Alcantara AlvaradoAún no hay calificaciones
- Informe Practica 4 Control IiDocumento10 páginasInforme Practica 4 Control IiJorge CastilloAún no hay calificaciones
- ARE 2023 PAO1 Assignment 2Documento10 páginasARE 2023 PAO1 Assignment 2Adrian JimenezAún no hay calificaciones
- MFAU 124 EB04 Eq7 Practica5Documento10 páginasMFAU 124 EB04 Eq7 Practica5Alfred StarkAún no hay calificaciones
- Tarea Nº6 Sistemas Lineales Dinámicos PDFDocumento26 páginasTarea Nº6 Sistemas Lineales Dinámicos PDFCamilo Ignacio Arriagada JaraAún no hay calificaciones
- Problema 1 en El Editor: Terminación Del Orden de Reacción ¿JD?:)Documento14 páginasProblema 1 en El Editor: Terminación Del Orden de Reacción ¿JD?:)JESUS ADRIAN BENITEZ SOLANOAún no hay calificaciones
- Proyecto 2Documento14 páginasProyecto 2Denni de LeónAún no hay calificaciones
- Insta 3Documento8 páginasInsta 3bruno ronaldoAún no hay calificaciones
- Tarea 03 FQ2 PDFDocumento14 páginasTarea 03 FQ2 PDFAnalucia CanAún no hay calificaciones
- Guia ETS Teoremas 2012Documento9 páginasGuia ETS Teoremas 2012barr1Aún no hay calificaciones
- Anexo 1 - DiodosDocumento17 páginasAnexo 1 - DiodosAlejandroAún no hay calificaciones
- D09Documento9 páginasD09Benji Martell BernardoAún no hay calificaciones
- Re Sueltos 01Documento12 páginasRe Sueltos 01Jesus Dionardy Contreras MoraAún no hay calificaciones
- Cuestionario 03Documento4 páginasCuestionario 03Juan Jiménez Nieto (1º BACH A)Aún no hay calificaciones
- Abril Adicionales - 1° Andrea GomezDocumento107 páginasAbril Adicionales - 1° Andrea Gomezalexandra gomezAún no hay calificaciones
- Convención de 1907Documento5 páginasConvención de 1907Jëssïcâ Sërrâ Tüh ChïQuïtâ JâmësAún no hay calificaciones
- Dimmer Electrónico Con Triac y DiacDocumento16 páginasDimmer Electrónico Con Triac y DiacEduardo DF7Aún no hay calificaciones
- Aclaracion Estac Nizama DiazDocumento3 páginasAclaracion Estac Nizama DiazCLAUDIA AMERICA CLEMENTE VILLAGRAAún no hay calificaciones
- Practica de FundicionDocumento4 páginasPractica de FundicionpiroAún no hay calificaciones
- TRABAJO DE INVESTIGACION FinalDocumento33 páginasTRABAJO DE INVESTIGACION FinalRatona Flo ScurraAún no hay calificaciones
- Cultivo en Callejones EXPOSICIONDocumento2 páginasCultivo en Callejones EXPOSICIONjuanAún no hay calificaciones
- Perfil Consultor - YomarisDocumento1 páginaPerfil Consultor - YomarisLuis Andres Castro OrtizAún no hay calificaciones
- Plan de Estudios 11 InformáticaDocumento2 páginasPlan de Estudios 11 InformáticaSERGIO DAVID ALAPE HUERTASAún no hay calificaciones
- Primera Parte A Del TaypiDocumento22 páginasPrimera Parte A Del TaypiFrancisco Bedregal50% (2)
- 4 Shampoo Acondicionador Tratamiento 2020Documento18 páginas4 Shampoo Acondicionador Tratamiento 2020danielAún no hay calificaciones
- Plane Special Concen Traci Ones Human AsDocumento95 páginasPlane Special Concen Traci Ones Human AsCarlos Redondo GilmartinAún no hay calificaciones
- El Fraude de Jose Antonio KastDocumento31 páginasEl Fraude de Jose Antonio KastSapucay Del Bagual0% (1)
- VehiculosDocumento54 páginasVehiculoshartnaitAún no hay calificaciones
- AnimegoVol2 (08 10)Documento109 páginasAnimegoVol2 (08 10)Konif Vargas RuizAún no hay calificaciones
- GLcauyeaDocumento2 páginasGLcauyeaDIEGOAún no hay calificaciones
- Reflexión Ética Moderna Por Jose GirotDocumento3 páginasReflexión Ética Moderna Por Jose Girotjose girotAún no hay calificaciones
- Pintura-Memoria Descriptiva - Especificaciones TecnicaDocumento12 páginasPintura-Memoria Descriptiva - Especificaciones TecnicaIrene RavinesAún no hay calificaciones
- Manual - Funciones Control Pid S71200 - S71500 PDFDocumento627 páginasManual - Funciones Control Pid S71200 - S71500 PDFCRISTIANAún no hay calificaciones
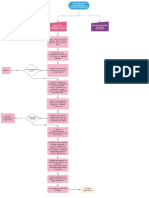
- Diagrama de FlujoDocumento1 páginaDiagrama de FlujoValentina DiazAún no hay calificaciones
- Cuestionario #5 Del Derecho de SucesiónDocumento3 páginasCuestionario #5 Del Derecho de Sucesiónmit CasAún no hay calificaciones
- FINAL Canes DetectoresDocumento80 páginasFINAL Canes Detectorescesar lazoAún no hay calificaciones
- Electromagnetismo EnunciadosDocumento7 páginasElectromagnetismo EnunciadosDaniel Colina FernándezAún no hay calificaciones
- Simbolos VW GolDocumento2 páginasSimbolos VW GolFreddy CarriónAún no hay calificaciones
- NM4 Gases IdealesDocumento15 páginasNM4 Gases IdealesmasterradiofmAún no hay calificaciones