También podría gustarte
- Introduccion A Los Mecanismos PDFDocumento6 páginasIntroduccion A Los Mecanismos PDFMary SquerraAún no hay calificaciones
- Introducción Grados de LibertadDocumento3 páginasIntroducción Grados de LibertadAnibalHuamanAún no hay calificaciones
- Unidad 2-Fundamentos de La CinemáticaDocumento14 páginasUnidad 2-Fundamentos de La CinemáticaNayeli EsquivelAún no hay calificaciones
- 1.3 Grado de LibertadDocumento8 páginas1.3 Grado de LibertadChololo Jr BansAún no hay calificaciones
- Mecanismos MML2Documento41 páginasMecanismos MML2Manuel GonzalezAún no hay calificaciones
- Par Cinemático y Grados de LibertadDocumento4 páginasPar Cinemático y Grados de Libertadjavier_toca0% (1)
- Tema-Objetivos-Marco TeóricoDocumento11 páginasTema-Objetivos-Marco TeóricoAustin OrtegaAún no hay calificaciones
- Eslabones ParesDocumento9 páginasEslabones Pares'Isaac Santana'Aún no hay calificaciones
- Practica #1 Conceptos Básicos de Dinámica - 2077517Documento6 páginasPractica #1 Conceptos Básicos de Dinámica - 2077517MooncrystalAún no hay calificaciones
- Teoria de Maquinas T2 y T4Documento9 páginasTeoria de Maquinas T2 y T4Manuel Francisco Romero CalderónAún no hay calificaciones
- S 3 EutiDocumento10 páginasS 3 EutipakoAún no hay calificaciones
- Cinemática y CinéticaDocumento8 páginasCinemática y CinéticaYerannys Guiñan de Valenzuela0% (1)
- Análisis Estructural Cap 2Documento36 páginasAnálisis Estructural Cap 2AlEjandro KEvinAún no hay calificaciones
- DesarrollarDocumento3 páginasDesarrollarAldair RobertoAún no hay calificaciones
- Tipos de Circuitos Secuenciales 2Documento9 páginasTipos de Circuitos Secuenciales 2JavierAún no hay calificaciones
- Mecanismos Clase 5Documento20 páginasMecanismos Clase 5carlos fernando romero hortuaAún no hay calificaciones
- CINEmatica - MECANISMO - TareaDocumento35 páginasCINEmatica - MECANISMO - TareaNoyo OcbAún no hay calificaciones
- Fundamentos de CinematicaDocumento55 páginasFundamentos de CinematicaLeonel José AlvaradoAún no hay calificaciones
- Diseño de Circuitos Neumaticos Metodo CascadaDocumento25 páginasDiseño de Circuitos Neumaticos Metodo Cascadacspinoza0% (1)
- Diseño de Circuitos Neumáticos: Método Paso A PasoDocumento14 páginasDiseño de Circuitos Neumáticos: Método Paso A PasoOrlando Jose HerediaAún no hay calificaciones
- Cl1 Cinematica de MecanismosDocumento33 páginasCl1 Cinematica de MecanismosJesus CesarAún no hay calificaciones
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Informe Metodo Cascada y Paso A PasoDocumento12 páginasInforme Metodo Cascada y Paso A PasoRenata AstudilloAún no hay calificaciones
- Grados de Libertad PDFDocumento15 páginasGrados de Libertad PDFYda Fernandez EspinAún no hay calificaciones
- l297 CalculoDocumento6 páginasl297 CalculoAnonymous IFvWyipAún no hay calificaciones
- Grados e Libertad - Teoria Sesion 1 de 3Documento5 páginasGrados e Libertad - Teoria Sesion 1 de 3Erick González LópezAún no hay calificaciones
- ExamenDocumento9 páginasExamenPerezAún no hay calificaciones
- Introducción A MecanismosDocumento42 páginasIntroducción A MecanismosDaniel DiazAún no hay calificaciones
- Tema 3.1 Circuitos Neumaticos, Metodo CascadaDocumento26 páginasTema 3.1 Circuitos Neumaticos, Metodo Cascadaalejandro.prAún no hay calificaciones
- Método Paso A Paso ElectroneumáticaDocumento15 páginasMétodo Paso A Paso ElectroneumáticaAnonymous lzi8sgAún no hay calificaciones
- Definiciones BasicasDocumento15 páginasDefiniciones BasicasMarco AdameAún no hay calificaciones
- Calculo de GrublerDocumento2 páginasCalculo de GrublerDavidEsquivelAún no hay calificaciones
- TMM-02 Mecanismos Articulados PlanosDocumento24 páginasTMM-02 Mecanismos Articulados PlanosNestorRinconMalloAún no hay calificaciones
- Tarea 3 MecanismosDocumento4 páginasTarea 3 MecanismosKarlos RodriguezAún no hay calificaciones
- Leyes de GrashofDocumento3 páginasLeyes de GrashofDenniis DenniisAún no hay calificaciones
- MOVILIDADDocumento13 páginasMOVILIDADlmaldonado_349011Aún no hay calificaciones
- Tema 3.3Documento6 páginasTema 3.3Antonio De Jesus Vidals CruzAún no hay calificaciones
- 3.1. Qué Son Los Mecanismos 2Documento27 páginas3.1. Qué Son Los Mecanismos 2Eddy Cadena GrandaAún no hay calificaciones
- Act 2, Uni 3Documento6 páginasAct 2, Uni 3Jorge Luis Hernandez VAún no hay calificaciones
- Ecuaciones OsciladorDocumento12 páginasEcuaciones OsciladorWorley Audelo MarthaAún no hay calificaciones
- Transmisiones MecanicasDocumento36 páginasTransmisiones MecanicasSonia Arriagada100% (1)
- 3.3 Sistemas Secuenciales y Métodos de Solución (Cascada, Paso A Paso, Grafcet)Documento22 páginas3.3 Sistemas Secuenciales y Métodos de Solución (Cascada, Paso A Paso, Grafcet)Skull AngelAún no hay calificaciones
- MecanismoDocumento31 páginasMecanismoJulio Cesar Castillo DelgadoAún no hay calificaciones
- AFM02.6 - Electroneumatica CascadaDocumento30 páginasAFM02.6 - Electroneumatica CascadaFrank JunkandprettyAún no hay calificaciones
- Proyecto Final de Circuitos DigitalesDocumento15 páginasProyecto Final de Circuitos DigitalesHumberto Mamani GalarzaAún no hay calificaciones
- Diagramas de Boloques y de Flujo de SeñalDocumento19 páginasDiagramas de Boloques y de Flujo de SeñalFernando Cuervo CuellarAún no hay calificaciones
- Clase 1 GDL GrashofDocumento23 páginasClase 1 GDL Grashofdavid lopezAún no hay calificaciones
- Mecanismos de 4 Barras de GrashofDocumento18 páginasMecanismos de 4 Barras de GrashofLuis Antonio BarbozaAún no hay calificaciones
- Práctica 4Documento9 páginasPráctica 4MaikolAún no hay calificaciones
- Mecanismos ArticuladosDocumento31 páginasMecanismos ArticuladosFrancisco Javier Villate GaonaAún no hay calificaciones
- Circuitos de MovimientoDocumento6 páginasCircuitos de MovimientoEdgar MoralesAún no hay calificaciones
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteRicardo ChanAún no hay calificaciones
- Analisis de Sistemas ArticuladosDocumento24 páginasAnalisis de Sistemas ArticuladosLalo Toño Peres LopesAún no hay calificaciones
- TMM-02 Mecanismos Articulados Planos v2-1Documento25 páginasTMM-02 Mecanismos Articulados Planos v2-1gonzaloAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- UF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoDe EverandUF1216 - Mantenimiento de sistemas auxiliares del motor de ciclo ottoCalificación: 4 de 5 estrellas4/5 (4)
- Proyectos Electonicos Con Microcontrolador PIC16F877ADocumento100 páginasProyectos Electonicos Con Microcontrolador PIC16F877Ajeancrv1978Aún no hay calificaciones
- Micro Pro Ces AdoresDocumento199 páginasMicro Pro Ces AdoresBhRqz GaByAún no hay calificaciones
- Portafolio CONTROLU2Documento1 páginaPortafolio CONTROLU2MonicaFloresAún no hay calificaciones
- Programacion en EnsambladorDocumento14 páginasProgramacion en EnsambladorhhuamanpAún no hay calificaciones
- Completo Laplace MATLAB Modelados SIMULINK PDFDocumento94 páginasCompleto Laplace MATLAB Modelados SIMULINK PDFAramis RamirezAún no hay calificaciones
- Humo HeladoDocumento9 páginasHumo HeladoAramis RamirezAún no hay calificaciones
- Diplomado PDFDocumento197 páginasDiplomado PDFAramis RamirezAún no hay calificaciones
- Series de FourierDocumento14 páginasSeries de FourierAramis RamirezAún no hay calificaciones
- Diplomado PDFDocumento197 páginasDiplomado PDFAramis RamirezAún no hay calificaciones
- 3.2 Elementos de Falla en Equipos Mecanicos Electricos y ElectronicosDocumento7 páginas3.2 Elementos de Falla en Equipos Mecanicos Electricos y ElectronicosMEHT8810Aún no hay calificaciones
- Resumenes Vibraciones MecanicasDocumento13 páginasResumenes Vibraciones MecanicasAramis RamirezAún no hay calificaciones
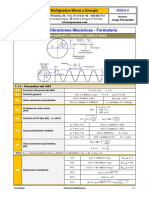
- 1-Formulario Vibraciones PDFDocumento4 páginas1-Formulario Vibraciones PDFAramis RamirezAún no hay calificaciones
- Resumenes Vibraciones MecanicasDocumento11 páginasResumenes Vibraciones MecanicasAramis RamirezAún no hay calificaciones
- 1-Formulario VibracionesDocumento4 páginas1-Formulario VibracionesAramis Ramirez0% (1)
- Formulario 5Documento1 páginaFormulario 5Aramis RamirezAún no hay calificaciones
- Prac.5 - Quemar ResistenciaDocumento6 páginasPrac.5 - Quemar ResistenciaAramis Ramirez0% (1)
- Codigo G FresadoDocumento118 páginasCodigo G FresadoCNC59100% (2)
- Descarga de Un CapacitorDocumento6 páginasDescarga de Un CapacitorAramis RamirezAún no hay calificaciones
- Diseño de LevasDocumento38 páginasDiseño de LevasAramis Ramirez50% (2)