También podría gustarte
- Introducción Grados de LibertadDocumento3 páginasIntroducción Grados de LibertadAnibalHuamanAún no hay calificaciones
- Introduccion A Los Mecanismos PDFDocumento6 páginasIntroduccion A Los Mecanismos PDFMary SquerraAún no hay calificaciones
- Cinemática y CinéticaDocumento8 páginasCinemática y CinéticaYerannys Guiñan de Valenzuela0% (1)
- Cinemática de MecanismosDocumento25 páginasCinemática de MecanismosGabriel CastilloAún no hay calificaciones
- Eslabones ParesDocumento9 páginasEslabones Pares'Isaac Santana'Aún no hay calificaciones
- Mecanismo 4 Barras ReporteDocumento13 páginasMecanismo 4 Barras ReporteMimi Flores Salazar100% (1)
- Cuestionario para La Prueba de Mecanismos. Yasmany Aguilar.Documento7 páginasCuestionario para La Prueba de Mecanismos. Yasmany Aguilar.Steven RonquilloAún no hay calificaciones
- S 3 EutiDocumento10 páginasS 3 EutipakoAún no hay calificaciones
- 1.3 Grado de LibertadDocumento8 páginas1.3 Grado de LibertadChololo Jr BansAún no hay calificaciones
- Cl1 Cinematica de MecanismosDocumento33 páginasCl1 Cinematica de MecanismosJesus CesarAún no hay calificaciones
- TEMA 1. Conceptos y Definiciones en Cinemática.Documento55 páginasTEMA 1. Conceptos y Definiciones en Cinemática.lucatoni999Aún no hay calificaciones
- Grados de Libertad PDFDocumento15 páginasGrados de Libertad PDFYda Fernandez EspinAún no hay calificaciones
- Análisis de posición y velocidad de un mecanismo de 4 barrasDocumento13 páginasAnálisis de posición y velocidad de un mecanismo de 4 barrasRicardo ChanAún no hay calificaciones
- Introducción A MecanismosDocumento42 páginasIntroducción A MecanismosDaniel DiazAún no hay calificaciones
- CINEmatica - MECANISMO - TareaDocumento35 páginasCINEmatica - MECANISMO - TareaNoyo OcbAún no hay calificaciones
- GDL o grados de libertad en mecanismosDocumento20 páginasGDL o grados de libertad en mecanismoscarlos fernando romero hortuaAún no hay calificaciones
- Cl1 Cinematica de MecanismosDocumento33 páginasCl1 Cinematica de MecanismosManuel Urbina CarrascoAún no hay calificaciones
- Mecanismos TopologiaDocumento10 páginasMecanismos TopologiaCésar LaraAún no hay calificaciones
- Fundamentos de CinematicaDocumento55 páginasFundamentos de CinematicaLeonel José AlvaradoAún no hay calificaciones
- Departamento de Energía Y MecánicaDocumento5 páginasDepartamento de Energía Y MecánicaJEAN CARLOS CAMPAÑA RAMIREZAún no hay calificaciones
- Clase 1 - Cinematica y DinamicaDocumento13 páginasClase 1 - Cinematica y DinamicaPatricio SabettaAún no hay calificaciones
- Mecanismos Cuestionario 1 Concho UpiitaDocumento7 páginasMecanismos Cuestionario 1 Concho Upiitabenitop0750% (2)
- Apunte de clase V3 - Cinemática de Mecanismos 2024Documento16 páginasApunte de clase V3 - Cinemática de Mecanismos 2024ceciAún no hay calificaciones
- 3.1. Qué Son Los Mecanismos 2Documento27 páginas3.1. Qué Son Los Mecanismos 2Eddy Cadena GrandaAún no hay calificaciones
- Mecanismo-1IM131 (A) - ASIG. (1) - RamírezDocumento7 páginasMecanismo-1IM131 (A) - ASIG. (1) - RamírezZory100% (1)
- Grados e Libertad - Teoria Sesion 1 de 3Documento5 páginasGrados e Libertad - Teoria Sesion 1 de 3Erick González LópezAún no hay calificaciones
- Fundamentos de cinemática en mecanismos planosDocumento9 páginasFundamentos de cinemática en mecanismos planosManuel Francisco Romero CalderónAún no hay calificaciones
- Conceptos Fundamentales de Máquinas y MecanismosDocumento13 páginasConceptos Fundamentales de Máquinas y MecanismosHebert Alberto Rodríguez Cámara100% (1)
- Reporte 1 Lab DinamicaDocumento5 páginasReporte 1 Lab DinamicaPaulina Rodriguez CarrilloAún no hay calificaciones
- Análisis y Síntesis de Mecanismos ResumenDocumento17 páginasAnálisis y Síntesis de Mecanismos ResumenGAM TZ- Tutos y Covers100% (1)
- Practica #1 Conceptos Básicos de Dinámica - 2077517Documento6 páginasPractica #1 Conceptos Básicos de Dinámica - 2077517MooncrystalAún no hay calificaciones
- MecanismosDocumento5 páginasMecanismosCristian Eduardo Murillo CamarenaAún no hay calificaciones
- Producto Acreditable N1Documento5 páginasProducto Acreditable N1Danny QuinatoaAún no hay calificaciones
- Resumen Capitulo 2Documento16 páginasResumen Capitulo 2Elton GuadarramaAún no hay calificaciones
- ME02 - Fundamentos de Cinemática v4Documento68 páginasME02 - Fundamentos de Cinemática v4Jaimar -3-Aún no hay calificaciones
- Mecanismos MML2Documento41 páginasMecanismos MML2Manuel GonzalezAún no hay calificaciones
- MecanismoDocumento7 páginasMecanismoJosephmessi sebasAún no hay calificaciones
- Introducción a los mecanismosDocumento18 páginasIntroducción a los mecanismosDanna LopezAún no hay calificaciones
- Mecanismo de BarrasDocumento23 páginasMecanismo de BarrasJorge Antonio Silva RodriguezAún no hay calificaciones
- Unidad I - Diagrama Cinemático - Santaella YDocumento11 páginasUnidad I - Diagrama Cinemático - Santaella YYsaac YhofrenAún no hay calificaciones
- MOVILIDADDocumento13 páginasMOVILIDADlmaldonado_349011Aún no hay calificaciones
- ASM Tema 1Documento93 páginasASM Tema 1Anita MendietaAún no hay calificaciones
- Grados de Libertad GrashofDocumento2 páginasGrados de Libertad GrashofCristian Angel ValdiviaAún no hay calificaciones
- Resumen Unidad 02Documento19 páginasResumen Unidad 02JOSE JESUS MARTINEZ ACOSTAAún no hay calificaciones
- Mecanismos - Biela - Manivela - Corredera PDFDocumento69 páginasMecanismos - Biela - Manivela - Corredera PDFMiguelAngelJauregui100% (1)
- Practicas DinamicaDocumento80 páginasPracticas DinamicaCesar CaReAún no hay calificaciones
- Sintesis de MecanismosDocumento24 páginasSintesis de MecanismosVictor MerlanoAún no hay calificaciones
- Lab Dinamica Reporte 1 2 3 FIMEDocumento16 páginasLab Dinamica Reporte 1 2 3 FIMECarlos Almaguer100% (1)
- Unidad 2-Fundamentos de La CinemáticaDocumento14 páginasUnidad 2-Fundamentos de La CinemáticaNayeli EsquivelAún no hay calificaciones
- Evaluacion 1 y 2 TeoriaDocumento57 páginasEvaluacion 1 y 2 Teoriadiego ISAún no hay calificaciones
- TMM-02 Mecanismos Articulados PlanosDocumento24 páginasTMM-02 Mecanismos Articulados PlanosNestorRinconMalloAún no hay calificaciones
- Teoria de MaquinasDocumento53 páginasTeoria de MaquinasJaime Espinoza SandovalAún no hay calificaciones
- Grados de libertad mecanismos máquinasDocumento25 páginasGrados de libertad mecanismos máquinasuriel1293100% (1)
- MecanismoDocumento31 páginasMecanismoJulio Cesar Castillo DelgadoAún no hay calificaciones
- Ejercicios de Integrales de Línea, Superficie y VolumenDe EverandEjercicios de Integrales de Línea, Superficie y VolumenCalificación: 4 de 5 estrellas4/5 (2)
- Curso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoDe EverandCurso moderno de máquinas eléctricas rotativas: Las máquinas eléctricas en régimen dinámicoAún no hay calificaciones
- Libro Kit Basico ArduinoDocumento120 páginasLibro Kit Basico ArduinoAngel Hernandez100% (3)
- Reproduccion Del BettaDocumento5 páginasReproduccion Del Bettajavier_tocaAún no hay calificaciones
- Contrato de Arrendamiento de Vivienda - Plantilla - Contrato de Alquiler de Vivienda LIBERADODocumento8 páginasContrato de Arrendamiento de Vivienda - Plantilla - Contrato de Alquiler de Vivienda LIBERADOjavier_tocaAún no hay calificaciones
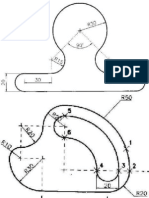
- 59 Ejerciciosguiadosdeautocad 2007Documento270 páginas59 Ejerciciosguiadosdeautocad 2007Mãtu GlökerAún no hay calificaciones
- Transport Ad orDocumento1 páginaTransport Ad orFredy20Aún no hay calificaciones
- Postres Net 30 Recetas de Postres Caseros Parte 1 PDFDocumento32 páginasPostres Net 30 Recetas de Postres Caseros Parte 1 PDFavilatoursAún no hay calificaciones
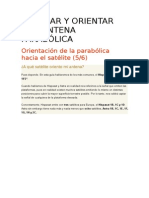
- Com Orientar La ParabólicaDocumento9 páginasCom Orientar La Parabólicajavier_tocaAún no hay calificaciones
- ApuntesgeneralesDocumento94 páginasApuntesgeneralesKas AvilaAún no hay calificaciones
- Ejercicios BásicosDocumento141 páginasEjercicios BásicosMarco Antonio Vega VillenaAún no hay calificaciones
- Igualdad .. (1) Epm DefinitivoDocumento20 páginasIgualdad .. (1) Epm Definitivojavier_tocaAún no hay calificaciones
- Torre de Beltrán de La Cueva Delimitación de Interes CulturalDocumento1 páginaTorre de Beltrán de La Cueva Delimitación de Interes Culturaljavier_tocaAún no hay calificaciones
- Ejercicios Iniciales AutocadDocumento9 páginasEjercicios Iniciales AutocadJorge Herrero García100% (2)
- CAMConcept Mill SP 1828 C 01Documento196 páginasCAMConcept Mill SP 1828 C 01Lucho Mancilla LopezAún no hay calificaciones
- 03 Curso-Completo-De-Dibujo-Para-Comics-Christopher-Hart PDFDocumento118 páginas03 Curso-Completo-De-Dibujo-Para-Comics-Christopher-Hart PDFLuis Quintero94% (17)
- Postres Net 30 Recetas de Postres Caseros Parte 1 PDFDocumento32 páginasPostres Net 30 Recetas de Postres Caseros Parte 1 PDFavilatoursAún no hay calificaciones
- Contrato de Arrendamiento de Vivienda - Plantilla - Contrato de Alquiler de Vivienda LIBERADODocumento8 páginasContrato de Arrendamiento de Vivienda - Plantilla - Contrato de Alquiler de Vivienda LIBERADOjavier_tocaAún no hay calificaciones
- Curso de Electronica Practica PDFDocumento57 páginasCurso de Electronica Practica PDFSudis11Aún no hay calificaciones
- CNC 840DDocumento134 páginasCNC 840Dmariano_zoomAún no hay calificaciones
- 59 Ejerciciosguiadosdeautocad 2007Documento270 páginas59 Ejerciciosguiadosdeautocad 2007Mãtu GlökerAún no hay calificaciones
- III.1. Canciones CantabriaDocumento20 páginasIII.1. Canciones CantabriaChuchi San EmeterioAún no hay calificaciones
- Proyecto ExtremaduraDocumento45 páginasProyecto Extremadurajavier_tocaAún no hay calificaciones
- Ejercicios Intermedios Autocad PDFDocumento8 páginasEjercicios Intermedios Autocad PDFRefugio CarmonaAún no hay calificaciones
- Libro FinalDocumento39 páginasLibro Finaljavier_tocaAún no hay calificaciones
- Artes - Diseños Celtas para Tallar en Madera o Grafismo (C)Documento62 páginasArtes - Diseños Celtas para Tallar en Madera o Grafismo (C)javier_tocaAún no hay calificaciones
- Como Sacar EsquejesDocumento28 páginasComo Sacar Esquejesjavier_tocaAún no hay calificaciones
- HTTP WWW - Idae.es Index - PHP Mod - Documentos Mem - Descarga File Documentos 11081 Guia Instal Centralizadas Calef y ACS Edificios 08 659566a6Documento88 páginasHTTP WWW - Idae.es Index - PHP Mod - Documentos Mem - Descarga File Documentos 11081 Guia Instal Centralizadas Calef y ACS Edificios 08 659566a6noalunaAún no hay calificaciones
- Curso de Helicicultura - Sistema A Ciclo Biológico Completo Sistema de Tipo MixtoDocumento116 páginasCurso de Helicicultura - Sistema A Ciclo Biológico Completo Sistema de Tipo Mixtojavier_tocaAún no hay calificaciones
- Planos Marqueteria CastillosDocumento62 páginasPlanos Marqueteria Castillosjavier_tocaAún no hay calificaciones
- Análisis Cinemático Mecanismos Métodos NuméricosDocumento10 páginasAnálisis Cinemático Mecanismos Métodos NuméricosDavid QuevedoAún no hay calificaciones
- Anexo 1 Guías Laboratorio Física General 100413Documento82 páginasAnexo 1 Guías Laboratorio Física General 100413laura espanaAún no hay calificaciones
- 18problemas Cinemática 4Documento2 páginas18problemas Cinemática 4juanalsoAún no hay calificaciones
- 001 - Enganajes 2Documento23 páginas001 - Enganajes 2Germán Edilberto67% (3)
- Discusion 3Documento6 páginasDiscusion 3Daniel CornejoAún no hay calificaciones
- DEBER UNIDAD 3 AcomodadoDocumento15 páginasDEBER UNIDAD 3 AcomodadoJ Luis ChirauAún no hay calificaciones
- Laboratorio Numero 4 de Fisica IIDocumento50 páginasLaboratorio Numero 4 de Fisica IIAlexZaNderAún no hay calificaciones
- Wilson y SimpsomDocumento8 páginasWilson y SimpsomKevin Leonidas Benitez MirandaAún no hay calificaciones
- 1pdcb302u2014 IDocumento6 páginas1pdcb302u2014 IJimmy VilcaAún no hay calificaciones
- Ejercicios Propuestos Dinamica 2013 I Microsoft Office WordDocumento7 páginasEjercicios Propuestos Dinamica 2013 I Microsoft Office WordAnderson DiazAún no hay calificaciones
- Tabla IiiDocumento4 páginasTabla IiiJorge Alexander Prieto Pabon100% (2)
- Pregunta #01Documento7 páginasPregunta #01ANGHELO DGAún no hay calificaciones
- ESTATICA-InG-U1y2-Fundamanetos Mec Clas y Sistema de UnidadesDocumento26 páginasESTATICA-InG-U1y2-Fundamanetos Mec Clas y Sistema de UnidadesChava RomeroAún no hay calificaciones
- Cinemática y dinámica de partículas: Velocidad y aceleraciónDocumento66 páginasCinemática y dinámica de partículas: Velocidad y aceleraciónDAVID ISAIAS ZITLE ARROYOAún no hay calificaciones
- Pre Informe de LaboratorioDocumento9 páginasPre Informe de LaboratorioJUAN DAVID URREA ZULUAGAAún no hay calificaciones
- Cinemática de Maquinaria AgrícolaDocumento16 páginasCinemática de Maquinaria AgrícolaPsycosiado DivertidoAún no hay calificaciones
- Taller Cinematica Angular y Cinetica Int 2020 - 3Documento3 páginasTaller Cinematica Angular y Cinetica Int 2020 - 3Karol Sneider IMBACHI ALMARIOAún no hay calificaciones
- Cremallera - PiñonDocumento4 páginasCremallera - PiñonClinton Quispe PongoAún no hay calificaciones
- 01 IntroduccionDocumento29 páginas01 IntroduccionDarwinPgAún no hay calificaciones
- Programa Fisica Medicina 2022Documento3 páginasPrograma Fisica Medicina 2022Yas OrtubiaAún no hay calificaciones
- Calculo ReductorDocumento59 páginasCalculo Reductorferastur316094% (16)
- Guía N°1 CinemáticaDocumento3 páginasGuía N°1 CinemáticaMatias Alviña MoragaAún no hay calificaciones
- Fricción en Movimiento HorizontalDocumento4 páginasFricción en Movimiento HorizontalIsaac VisualAún no hay calificaciones
- CAPITULO III (HIDROCINEMATICA) TerminadoDocumento18 páginasCAPITULO III (HIDROCINEMATICA) TerminadoMarielena Benavente ManzanoAún no hay calificaciones
- Cinematica de Un RobotDocumento7 páginasCinematica de Un Robotakuma119115Aún no hay calificaciones
- JoseMiguelMolina-Ashlyjulio-Segunda Ley Newton Movimiento Rectilineo-Grupo11Documento12 páginasJoseMiguelMolina-Ashlyjulio-Segunda Ley Newton Movimiento Rectilineo-Grupo11jmolina_572986Aún no hay calificaciones
- Lubricantes REPSOL para Cajas y TransmisionesDocumento50 páginasLubricantes REPSOL para Cajas y Transmisionesangelpio14Aún no hay calificaciones
- Ejercicios Dinamica Grupo 6Documento8 páginasEjercicios Dinamica Grupo 6José Carlos Julca SilvaAún no hay calificaciones
- HW3 EngranesRectosDocumento1 páginaHW3 EngranesRectosKaren VintimillaAún no hay calificaciones
- Servicio Previo A La Entrega - FMCDocumento14 páginasServicio Previo A La Entrega - FMCDavid Estevez100% (3)